opencv入门到精通——图像的几何变换
?
目录
目标
-
学习将不同的几何变换应用到图像上,如平移、旋转、仿射变换等。
-
你会看到这些函数:?cv.getPerspectiveTransform
变换
OpenCV提供了两个转换函数cv.warpAffine和cv.warpPerspective,您可以使用它们进行各种转换。cv.warpAffine采用2x3转换矩阵,而cv.warpPerspective采用3x3转换矩阵作为输入。
缩放
缩放只是调整图像的大小。为此,OpenCV带有一个函数cv.resize()。图像的大小可以手动指定,也可以指定缩放比例。也可使用不同的插值方法。首选的插值方法是cv.INTER_AREA用于缩小,cv.INTER_CUBIC(慢)和cv.INTER_LINEAR用于缩放。默认情况下,出于所有调整大小的目的,使用的插值方法为cv.INTER_LINEAR。您可以使用以下方法调整输入图像的大小:
import?numpy?as?np
import?cv2?as?cv
img?=?cv.imread('messi5.jpg')
res?=?cv.resize(img,None,fx=2,?fy=2,?interpolation?=?cv.INTER_CUBIC)
#或者
height,?width?=?img.shape[:2]
res?=?cv.resize(img,(2*width,?2*height),?interpolation?=?cv.INTER_CUBIC)
平移
平移是物体位置的移动。如果您知道在(x,y)方向上的位移,则将其设为
![]()
,你可以创建转换矩阵M,如下所示:
您可以将其放入np.float32类型的Numpy数组中,并将其传递给cv.warpAffine函数。参见下面偏移为(100, 50)的示例:
import?numpy?as?np
import?cv2?as?cv
img?=?cv.imread('messi5.jpg',0)
rows,cols?=?img.shape
M?=?np.float32([[1,0,100],[0,1,50]])
dst?=?cv.warpAffine(img,M,(cols,rows))
cv.imshow('img',dst)
cv.waitKey(0)
cv.destroyAllWindows()
警告
cv.warpAffine函数的第三个参数是输出图像的大小,其形式应为(width,height)。记住width?=列数,height?=行数。
你将看到下面的结果:

旋转
图像旋转角度为θ是通过以下形式的变换矩阵实现的:
但是OpenCV提供了可缩放的旋转以及可调整的旋转中心,因此您可以在自己喜欢的任何位置旋转。修改后的变换矩阵为:

其中:
\begin{array}{l} \alpha = scale \cdot \cos \theta , \ \beta = scale \cdot \sin \theta \end{array}
为了找到此转换矩阵,OpenCV提供了一个函数cv.getRotationMatrix2D。请检查以下示例,该示例将图像相对于中心旋转90度而没有任何缩放比例。
img?=?cv.imread('messi5.jpg',0)
rows,cols?=?img.shape
#?cols-1?和?rows-1?是坐标限制
M?=?cv.getRotationMatrix2D(((cols-1)/2.0,(rows-1)/2.0),90,1)
dst?=?cv.warpAffine(img,M,(cols,rows))
查看结果:

仿射变换
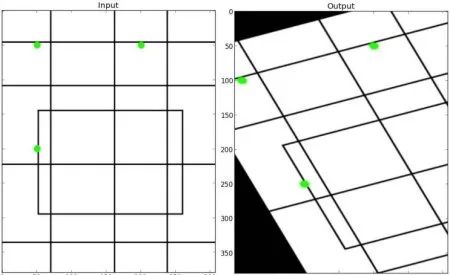
在仿射变换中,原始图像中的所有平行线在输出图像中仍将平行。为了找到变换矩阵,我们需要输入图像中的三个点及其在输出图像中的对应位置。然后cv.getAffineTransform将创建一个2x3矩阵,该矩阵将传递给cv.warpAffine。
查看以下示例,并查看我选择的点(以绿色标记):
img?=?cv.imread('drawing.png')
rows,cols,ch?=?img.shape
pts1?=?np.float32([[50,50],[200,50],[50,200]])
pts2?=?np.float32([[10,100],[200,50],[100,250]])
M?=?cv.getAffineTransform(pts1,pts2)
dst?=?cv.warpAffine(img,M,(cols,rows))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
查看结果:
透视变换
对于透视变换,您需要3x3变换矩阵。即使在转换后,直线也将保持直线。要找到此变换矩阵,您需要在输入图像上有4个点,在输出图像上需要相应的点。在这四个点中,其中三个不应共线。然后可以通过函数cv.getPerspectiveTransform找到变换矩阵。然后将cv.warpPerspective应用于此3x3转换矩阵。
请参见下面的代码:
img?=?cv.imread('sudoku.png')
rows,cols,ch?=?img.shape
pts1?=?np.float32([[56,65],[368,52],[28,387],[389,390]])
pts2?=?np.float32([[0,0],[300,0],[0,300],[300,300]])
M?=?cv.getPerspectiveTransform(pts1,pts2)
dst?=?cv.warpPerspective(img,M,(300,300))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
plt.show()
结果:

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 第十三章 枚举类型和泛型
- 第八章: 实验案例:Shell 脚本应用实战
- Docker 入门 ------容器互通以及Dockerfile
- 第02章_变量与运算符(关键字,标识符,变量,基本数据类型,进制,运算符,字符集)
- 精致旅游公司Treker网页设计 html模板
- 13、Kafka ------ kafka 消费者API用法(消费者消费消息代码演示)
- 【Web】websocket应用的是哪个协议
- 松松2023年工作汇报
- 基于C++的类Unix文件系统
- 【卡码网】54. 替换数字——代码随想录算法训练营Day08