【图的应用二:最短路径】- 用 C 语言实现迪杰斯特拉算法和弗洛伊德算法
目录
?
一、最短路径
假若要在计算机上建立一个交通咨询系统,则可以采用图的结构来表示实际的交通网络。如下图所示,图中顶点表示城市,边表示城市间的交通联系。

这个咨询系统可以回答旅客提出的各种问题。例如,一位旅客要从 A 城到 B 城,他希望选择一条中转次数最少的路线。假设图中每一站都需要换车,则这个问题反映到图上就是找一条顶点 A 到顶点 B 所包含边的数目最少的路径。只需从顶点 A 出发对图做广度优先搜索,一旦遇到顶点 B 就终止,由此所得的广度优先生成树上,从根顶点 A 到顶点 B 的路径就是中转次数最少的路径。
但是,这只是一类最简单的图的最短路径问题。有时,对于旅客来说,可能更关心的是节省交通费用;而对于司机来说,里程和速度则是他们感兴趣的信息。为了在图上表示有关信息,可对边赋予权,权的值表示两城市间的距离,或途中所需时间,或交通费用等。此时路径长度的度量就不再是路径上边的数目,而是路径上边的权值之和。考虑到交通图的有向性,例如,汽车的上山和下山,轮船的顺水和逆水,所花费的时间或代价就不相同,所以交通网往往是用带权有向网表示。在带权有向网中,习惯上称路径上的第一个顶点为源点(Source),最后一个顶点为终点(Destination)。
下面主要讨论两种最常见的最短路径问题:一种是求从某个源点到其余各顶点的最短路径,另一种是求每一对顶点之间的最短路径。
二、迪杰斯特拉算法
单源点的最短路径问题:给定带权有向图 G 和源点 v0,求从 v0 到 G 中其余各顶点的最短路径。
迪杰斯特拉(Dijkstra)提出了一个按路径长度递增的次序产生最短路径的算法,称为迪杰斯特拉算法。
(1) 迪杰斯特拉算法的求解过程:
对于网 N = (V, E),将 N 中的顶点分为两组:
第一组 S:已求出的最短路径的终点集合(初始时只包含源点 v0)。
第二组 V - S:尚未求出的最短路径的顶点集合(初始时为 V - {v0})。
算法将按各顶点与 v0 间最短路径长度递增的次序,逐个将集合 V - S 中的顶点加入到集合 S 中去。在这个过程中,总保持从 v0 到集合 S 中各顶点的路径长度始终不大于到集合 V - S 中各顶点的路径长度。
这种求解方法能确保是正确的,因为假设 S 为已求得最短路径的终点的集合,则可证明:下一条最短路径(设其终点为 x)或是边 (v0, x),或是中间只是经过 S 中的顶点而最后到达顶点 x 的路径。
这可用反证法来证明。假设此路径上有一个顶点不在 S 中,则说明存在一条终点不在 S 而长度比此路径短的路径。但是,这是不可能的,因为算法是按路径长度递增的次序来产生最短路径的,故长度比此路径短的所有路径均已产生,它们的终点必定在 S 中,即假设不成立。
(2) 迪杰斯特拉算法的实现:
假设用带权的邻接矩阵 arcs 来表示带权有向网 G。
算法的实现要引入以下辅助的数据结构:
-
一维数组 S[i]:记录从源点 v0 到终点 vi 是否已被确定最短路径长度,true 表示确定,false 表示尚未确定。
-
一维数组 Path[i]:记录从源点 v0 到终点 vi 的当前最短路径上 vi 的直接前驱顶点序号。其初值为:如果从 v0 到 vi 有弧,则 Path[i] 为 v0;否则为 -1。
-
一维数组 D[i]:记录从源点 v0 到终点 vi 的当前最短路径长度。其初值为:如果从 v0 到 vi 有弧,则 D[i] 为弧上的权值;否则为
。
最短路径为 D[k] = Min{ D[i] | },求得从源点到 vk 的最短路径后,将 vk 加入到第一组顶点集 S 中。
每当加入一个新的顶点到顶点集 S,对第二组剩余的各个顶点而言,多了一个 "中转" 顶点,从而多了一个 "中转" 路径,所以要对第二组剩余的各个顶点的最短路径长度进行更新。
原来从 v0 到 vi 的最短路径长度为 D[i],加入 vk 之和,以 vk 作为中间顶点的 "中转" 路径长度为:D[k] + G.arcs[k][i],若 D[k] + G.arcs[k][i] < D[i],则用 D[k] + G.arcs[k][i] < D[i] 取代 D[i]。
AMGraph.h:
#pragma once
?
typedef char VertexType;
typedef int ArcType;
?
#define DEFAULT_CAPACITY 2
?
typedef struct AMGraph
{
VertexType* vertices;
ArcType** arcs;
int vSize;
int aSize;
int capacity;
}AMGraph;
?
void AMGraphInit(AMGraph* pg);
?
void ShowAdjMatrix(AMGraph* pg);
?
int GetVertexPos(AMGraph* pg, VertexType v);
?
void InsertVertex(AMGraph* pg, VertexType v);
void InsertArc(AMGraph* pg, VertexType v1, VertexType v2, ArcType cost);
?
// 迪杰斯特拉算法
void ShortestPath_DIJ(AMGraph* pg, VertexType v, int* D, int* Path);AMGraph.c:
#include "AMGraph.h"
#include <assert.h>
#include <stdlib.h>
#include <stdio.h>
#include <stdbool.h>
?
void AMGraphInit(AMGraph* pg)
{
assert(pg);
pg->vSize = pg->aSize = 0;
pg->capacity = DEFAULT_CAPACITY;
?
pg->vertices = (VertexType*)malloc(sizeof(VertexType) * pg->capacity);
assert(pg->vertices);
?
pg->arcs = (ArcType**)malloc(sizeof(ArcType*) * pg->capacity);
assert(pg->arcs);
for (int i = 0; i < pg->capacity; ++i)
{
pg->arcs[i] = (ArcType*)malloc(sizeof(ArcType) * pg->capacity);
assert(pg->arcs[i]);
for (int j = 0; j < pg->capacity; ++j)
{
if (i == j)
pg->arcs[i][j] = 0;
else
pg->arcs[i][j] = INT_MAX;
}
}
}
?
void ShowAdjMatrix(AMGraph* pg)
{
assert(pg);
printf(" ? "); ?// 输出 3 个空格
for (int i = 0; i < pg->vSize; ++i)
{
printf("%c ", pg->vertices[i]);
}
printf("\n");
?
for (int i = 0; i < pg->vSize; ++i)
{
printf("%c ", pg->vertices[i]);
for (int j = 0; j < pg->vSize; ++j)
{
if (pg->arcs[i][j] == INT_MAX)
printf("# "); ?// 用 # 代替 ∞
else
printf("%-3d", pg->arcs[i][j]);
}
printf("\n");
}
}
?
int GetVertexPos(AMGraph* pg, VertexType v)
{
assert(pg);
for (int i = 0; i < pg->vSize; ++i)
{
if (pg->vertices[i] == v)
return i;
}
return -1;
}
?
void InsertVertex(AMGraph* pg, VertexType v)
{
assert(pg);
// 考虑是否需要扩容
if (pg->vSize == pg->capacity)
{
VertexType* tmp1 = (VertexType*)realloc(pg->vertices, sizeof(VertexType) * 2 * pg->capacity);
assert(tmp1);
pg->vertices = tmp1;
?
ArcType** tmp2 = (ArcType**)realloc(pg->arcs, sizeof(ArcType*) * 2 * pg->capacity);
assert(tmp2);
pg->arcs = tmp2;
for (int i = 0; i < pg->capacity; ++i)
{
ArcType* tmp3 = (ArcType*)realloc(pg->arcs[i], sizeof(ArcType) * 2 * pg->capacity);
assert(tmp3);
pg->arcs[i] = tmp3;
for (int j = pg->capacity; j < 2 * pg->capacity; ++j)
{
pg->arcs[i][j] = INT_MAX;
}
}
for (int i = pg->capacity; i < 2 * pg->capacity; ++i)
{
pg->arcs[i] = (ArcType*)malloc(sizeof(ArcType) * 2 * pg->capacity);
assert(pg->arcs[i]);
for (int j = 0; j < 2 * pg->capacity; ++j)
{
if (i == j)
pg->arcs[i][j] = 0;
else
pg->arcs[i][j] = INT_MAX;
}
}
?
pg->capacity *= 2;
}
// 插入顶点
pg->vertices[pg->vSize++] = v;
}
?
void InsertArc(AMGraph* pg, VertexType v1, VertexType v2, ArcType cost)
{
assert(pg);
int pos1 = GetVertexPos(pg, v1);
int pos2 = GetVertexPos(pg, v2);
if (pos1 == -1 || pos2 == -1)
return;
?
if (pg->arcs[pos1][pos2] != INT_MAX)
return;
?
pg->arcs[pos1][pos2] = cost;
++pg->aSize;
}
?
// 迪杰斯特拉算法的实现
void ShortestPath_DIJ(AMGraph* pg, VertexType v, int* D, int* Path)
{
assert(pg);
int pos = GetVertexPos(pg, v);
if (pos == -1)
return;
?
bool* S = (bool*)malloc(sizeof(bool) * pg->vSize);
assert(S);
for (int i = 0; i < pg->vSize; ++i)
{
S[i] = false;
D[i] = pg->arcs[pos][i];
if (i != pos && D[i] != INT_MAX)
Path[i] = pos;
else
Path[i] = -1;
}
S[pos] = true;
?
for (int i = 0; i < pg->vSize - 1; ++i)
{
int min;
int k;
int flag = 1;
for (int j = 0; j < pg->vSize; ++j)
{
if (S[j] != false)
{
continue;
}
if (flag)
{
min = D[j];
k = j;
flag = 0;
continue;
}
if (D[j] < min)
{
min = D[j];
k = j;
}
}
?
S[k] = true;
for (int j = 0; j < pg->vSize; ++j)
{
?
if (S[j] == false &&
pg->arcs[k][j] != INT_MAX && D[k] + pg->arcs[k][j] < D[j])
{
D[j] = D[k] + pg->arcs[k][j];
Path[j] = k;
}
}
}
?
free(S);
}Test.c:
#include "AMGraph.h"
#include <stdio.h>
#include <stdlib.h>
#include <assert.h>
?
int main()
{
AMGraph g;
AMGraphInit(&g);
InsertVertex(&g, 'A');
InsertVertex(&g, 'B');
InsertVertex(&g, 'C');
InsertVertex(&g, 'D');
InsertVertex(&g, 'E');
InsertVertex(&g, 'F');
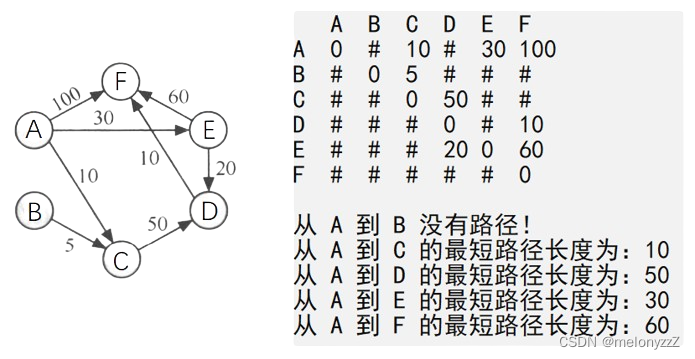
InsertArc(&g, 'A', 'C', 10);
InsertArc(&g, 'A', 'E', 30);
InsertArc(&g, 'A', 'F', 100);
InsertArc(&g, 'B', 'C', 5);
InsertArc(&g, 'C', 'D', 50);
InsertArc(&g, 'D', 'F', 10);
InsertArc(&g, 'E', 'D', 20);
InsertArc(&g, 'E', 'F', 60);
ShowAdjMatrix(&g);
printf("\n");
?
int* D = (int*)malloc(sizeof(int) * g.vSize);
int* Path = (int*)malloc(sizeof(int) * g.vSize);
assert(D && Path);
ShortestPath_DIJ(&g, 'A', D, Path);
?
for (int i = 1; i < g.vSize; ++i)
{
if (D[i] == INT_MAX)
printf("从 A 到 %c 没有路径!\n", g.vertices[i]);
else
printf("从 A 到 %c 的最短路径长度为:%d\n", g.vertices[i], D[i]);
}
free(D);
free(Path);
return 0;
}
三、弗洛伊德算法
求解每一对顶点之间的最短路径有两种方法:其一是分别以图中的每个顶点为源点共调用 n 次迪杰斯特拉算法;其二是采用下面介绍的弗洛伊德(Floyd)算法。两种算法的时间复杂度均为 O(n^3),但后者形式上较简单。
弗洛伊德算法仍然使用带权的邻接矩阵 arcs 来表示有向网 G,求从顶点 vi 到 vj 的最短路径。
算法的实现要引入以下辅助的数据结构:
-
二维数组 D[i][j]:记录顶点 vi 到 vj 之间的最短路径长度。
-
二维数组 Path[i][j]:最短路径上顶点 vj 的前一顶点的序号。
算法步骤:
将 vi 到 vj 的最短路径长度初始化,即 D[i][j] = G.arcs[i][j],然后进行 n 次比较和更新。
-
在 vi 和 vj 间加入顶点 v0,比较 (vi, vj) 和 (vi, v0, vj) 的路径长度,取其中较短者为 vi 到 vj 的中间顶点序号不大于 0 的最短路径。
-
在 vi 和 vj 间加入顶点 v1,得到 (vi, ..., v1) 和 (v1, ..., vj),其中 (vi, ..., v1) 是 vi 到 v1 的且中间顶点序号不大于 0 的最短路径,(v1, ..., vj) 是 v1 到 vj 的且中间顶点的序号不大于 0 的最短路径,这两条路径已在上一步中求出。比较 (vi, ...., v1, ..., vj) 与上一步求出的 vi 到 vj 的中间顶点序号不大于 0 的最短路径,取其中较短者作为 vi 到 vj 的中间顶点序号不大于 1 的最短路径。
-
依次类推,在 vi 和 vj 间加入顶点 vk,得到 (vi, ..., vk) 和 (vk, ..., vj),它们分别是从 vi 到 vk 和从 vk 到 vj 的中间顶点序号不大于 k - 1 的最短路径,将 (vi, ..., vk, ..., vj) 和已经得到的从 vi 到 vj 且中间顶点序号不大于 k - 1 的最短路径相比较,其长度较短者便是从 vi 到 vj 的中间顶点的序号不大于 k 的最短路径。这样,经过 n 次比较后,最后求得的必是从 vi 到 vj 的最短路径。按此方法,可用同时求得各对顶点间的最短路径。
void ShortestPath_Floyd(AMGraph* pg, int** D, int** Path)
{
assert(pg);
for (int i = 0; i < pg->vSize; ++i)
{
for (int j = 0; j < pg->vSize; ++j)
{
D[i][j] = pg->arcs[i][j];
if (i != j && D[i][j] != INT_MAX)
Path[i][j] = i;
else
Path[i][j] = -1;
}
}
?
for (int k = 0; k < pg->vSize; ++k)
{
for (int i = 0; i < pg->vSize; ++i)
{
for (int j = 0; j < pg->vSize; ++j)
{
if (i != k && j != k && i != j)
{
if (D[i][k] != INT_MAX && D[k][j] != INT_MAX &&
D[i][k] + D[k][j] < D[i][j])
{
D[i][j] = D[i][k] + D[k][j];
Path[i][j] = Path[k][j];
}
}
}
}
}
}Test.c:
#include "AMGraph.h"
#include <stdio.h>
#include <stdlib.h>
#include <assert.h>
?
int main()
{
AMGraph g;
AMGraphInit(&g);
InsertVertex(&g, 'A');
InsertVertex(&g, 'B');
InsertVertex(&g, 'C');
InsertVertex(&g, 'D');
InsertArc(&g, 'A', 'B', 1);
InsertArc(&g, 'A', 'D', 4);
InsertArc(&g, 'B', 'C', 9);
InsertArc(&g, 'B', 'D', 2);
InsertArc(&g, 'C', 'A', 3);
InsertArc(&g, 'C', 'B', 5);
InsertArc(&g, 'C', 'D', 8);
InsertArc(&g, 'D', 'C', 6);
ShowAdjMatrix(&g);
printf("\n");
?
int** D = (int**)malloc(sizeof(int*) * g.vSize);
assert(D);
for (int i = 0; i < g.vSize; ++i)
{
D[i] = (int*)malloc(sizeof(int) * g.vSize);
assert(D[i]);
}
int** Path = (int**)malloc(sizeof(int*) * g.vSize);
assert(Path);
for (int i = 0; i < g.vSize; ++i)
{
Path[i] = (int*)malloc(sizeof(int) * g.vSize);
assert(Path[i]);
}
ShortestPath_Floyd(&g, D, Path);
?
for (int i = 0; i < g.vSize; ++i)
{
for (int j = 0; j < g.vSize; ++j)
{
printf("%d ", D[i][j]);
}
printf("\n");
}
printf("\n");
for (int i = 0; i < g.vSize; ++i)
{
for (int j = 0; j < g.vSize; ++j)
{
printf("%d ", Path[i][j]);
}
printf("\n");
}
?
free(D);
free(Path);
return 0;
}
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【设计模式】腾讯面经:原型模式怎么理解?
- 机器人行业概况(2)
- C语言关键字------(2)
- Hive之set参数大全-3
- C++力扣题目701--二叉搜索树中的插入操作
- 算法训练营Day27
- Java技术-isEmpty 和 isBlank 的用法区别
- 【温故而知新】HTML元素/属性/标题/注释/段落/文本格式/头部/主体
- 力扣(leetcode)第830题较大分组的位置(Python)
- java并发-ConcurrentHashMap 在Java7 和 8 的区别