基于点云去滤除灰尘的滤波算法调研
发布时间:2023年12月17日
背景
激光雷达在恶劣天气下会影响感知识别的精度,造成误差,将灰尘,雨雪误识别为障碍物,为了降低对灰尘的误检,因此调研相关的灰尘滤波算法。
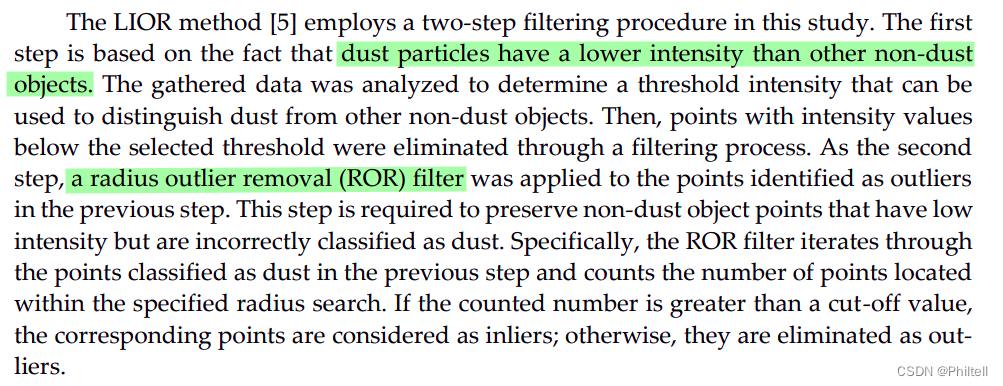
上文中提到先通过反射强度对灰尘进行滤除,灰尘的反射强度比非灰尘反射强度低。通过反射强度能够滤除一些点。然后通过半径异常点移除滤波器。
首先将点识别为外部点,
相关程序代码: https://github.com/AliAfzala/dedusting_filter
参考链接
[1] Design of a LIOR-Based De-Dust Filter for LiDAR Sensors in
Off-Road Vehicles
[2]
文章来源:https://blog.csdn.net/CCCrunner/article/details/135045327
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 什么是预解析
- 基于springboot的图书管理系统
- Android 13 - Media框架(24)- OMXNodeInstance(一)
- 【FPGA】数字电路设计基础
- 【AIGC-图片生成视频系列-7】MoonShot:实现多模态条件下的可控视频生成和编辑
- Python笔记03-判断和循环
- discuz论坛附件上传限制大小2MB
- USACO08FEB Hotel G
- Stringbuilder和正则表达式
- 基本shell功能实现(exec系列程序替换函数练习)