YOLOv8改进 更换旋转目标检测的主干网络LSKNet
发布时间:2024年01月01日

一、旋转目标检测主干网络LSKNet论文
论文地址:2303.09030.pdf (arxiv.org)
二、Large Selective Kernel Network 的结构
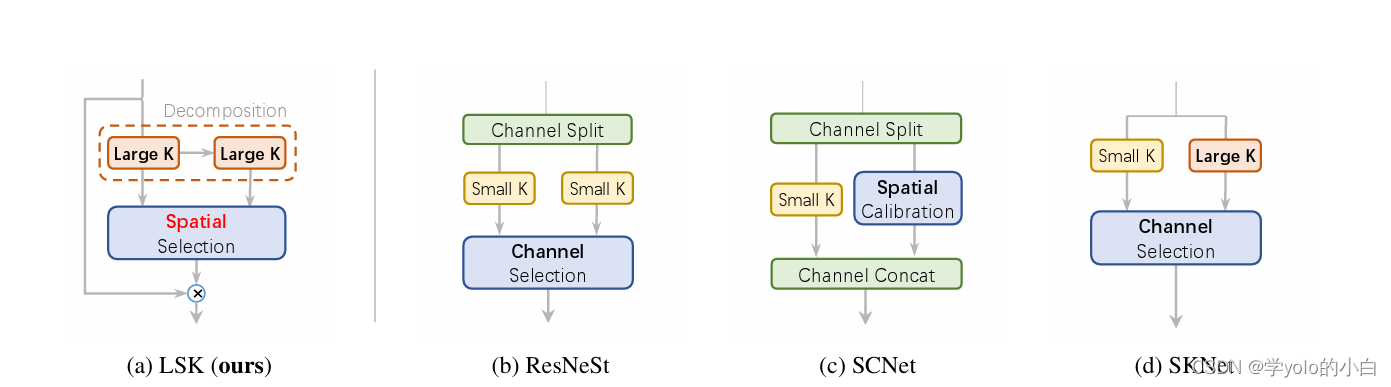
? ? LSK明确地产生了具有各种大感受野的多个特征,使后来的内核选择更加容易且顺序分解比简单地应用一个较大的核更有效更高效。为了提高网络关注检测目标的最相关的空间背景区域的能力,LSK使用了一种空间选择机制,从不同尺度的大卷积核中空间选择特征图。
三、代码实现
1、在ultralytics\ultralytics\nn路径下新建一个文件夹命名为backbone,用于存放网络结构修改的代码。
并在该?backbone文件夹路径下新建py文件lsknet.py,并在该文件里添加lsknet网络结构的代码:
import torch
import torch.nn as nn
from torch.nn.modules.utils import _pair as to_2tuple
from timm.layers import DropPath, to_2tuple
from functools import partial
import numpy as np
__all__ = 'lsknet_t', 'lsknet_s'
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Conv2d(in_features, hidden_features, 1)
self.dwconv = DWConv(hidden_features)
self.act = act_layer()
self.fc2 = nn.Conv2d(hidden_features, out_features, 1)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.dwconv(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class LSKblock(nn.Module):
def __init__(self, dim):
super().__init__()
self.conv0 = nn.Conv2d(dim, dim, 5, padding=2, groups=dim)
self.conv_spatial = nn.Conv2d(dim, dim, 7, stride=1, padding=9, groups=dim, dilation=3)
self.conv1 = nn.Conv2d(dim, dim//2, 1)
self.conv2 = nn.Conv2d(dim, dim//2, 1)
self.conv_squeeze = nn.Conv2d(2, 2, 7, padding=3)
self.conv = nn.Conv2d(dim//2, dim, 1)
def forward(self, x):
attn1 = self.conv0(x)
attn2 = self.conv_spatial(attn1)
attn1 = self.conv1(attn1)
attn2 = self.conv2(attn2)
attn = torch.cat([attn1, attn2], dim=1)
avg_attn = torch.mean(attn, dim=1, keepdim=True)
max_attn, _ = torch.max(attn, dim=1, keepdim=True)
agg = torch.cat([avg_attn, max_attn], dim=1)
sig = self.conv_squeeze(agg).sigmoid()
attn = attn1 * sig[:,0,:,:].unsqueeze(1) + attn2 * sig[:,1,:,:].unsqueeze(1)
attn = self.conv(attn)
return x * attn
class Attention(nn.Module):
def __init__(self, d_model):
super().__init__()
self.proj_1 = nn.Conv2d(d_model, d_model, 1)
self.activation = nn.GELU()
self.spatial_gating_unit = LSKblock(d_model)
self.proj_2 = nn.Conv2d(d_model, d_model, 1)
def forward(self, x):
shorcut = x.clone()
x = self.proj_1(x)
x = self.activation(x)
x = self.spatial_gating_unit(x)
x = self.proj_2(x)
x = x + shorcut
return x
class Block(nn.Module):
def __init__(self, dim, mlp_ratio=4., drop=0.,drop_path=0., act_layer=nn.GELU, norm_cfg=None):
super().__init__()
self.norm1 = nn.BatchNorm2d(dim)
self.norm2 = nn.BatchNorm2d(dim)
self.attn = Attention(dim)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
layer_scale_init_value = 1e-2
self.layer_scale_1 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
self.layer_scale_2 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
def forward(self, x):
x = x + self.drop_path(self.layer_scale_1.unsqueeze(-1).unsqueeze(-1) * self.attn(self.norm1(x)))
x = x + self.drop_path(self.layer_scale_2.unsqueeze(-1).unsqueeze(-1) * self.mlp(self.norm2(x)))
return x
class OverlapPatchEmbed(nn.Module):
""" Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=7, stride=4, in_chans=3, embed_dim=768, norm_cfg=None):
super().__init__()
patch_size = to_2tuple(patch_size)
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=stride,
padding=(patch_size[0] // 2, patch_size[1] // 2))
self.norm = nn.BatchNorm2d(embed_dim)
def forward(self, x):
x = self.proj(x)
_, _, H, W = x.shape
x = self.norm(x)
return x, H, W
class LSKNet(nn.Module):
def __init__(self, img_size=224, in_chans=3, embed_dims=[64, 128, 256, 512],
mlp_ratios=[8, 8, 4, 4], drop_rate=0., drop_path_rate=0., norm_layer=partial(nn.LayerNorm, eps=1e-6),
depths=[3, 4, 6, 3], num_stages=4,
norm_cfg=None):
super().__init__()
self.depths = depths
self.num_stages = num_stages
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule
cur = 0
for i in range(num_stages):
patch_embed = OverlapPatchEmbed(img_size=img_size if i == 0 else img_size // (2 ** (i + 1)),
patch_size=7 if i == 0 else 3,
stride=4 if i == 0 else 2,
in_chans=in_chans if i == 0 else embed_dims[i - 1],
embed_dim=embed_dims[i], norm_cfg=norm_cfg)
block = nn.ModuleList([Block(
dim=embed_dims[i], mlp_ratio=mlp_ratios[i], drop=drop_rate, drop_path=dpr[cur + j],norm_cfg=norm_cfg)
for j in range(depths[i])])
norm = norm_layer(embed_dims[i])
cur += depths[i]
setattr(self, f"patch_embed{i + 1}", patch_embed)
setattr(self, f"block{i + 1}", block)
setattr(self, f"norm{i + 1}", norm)
self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def forward(self, x):
B = x.shape[0]
outs = []
for i in range(self.num_stages):
patch_embed = getattr(self, f"patch_embed{i + 1}")
block = getattr(self, f"block{i + 1}")
norm = getattr(self, f"norm{i + 1}")
x, H, W = patch_embed(x)
for blk in block:
x = blk(x)
x = x.flatten(2).transpose(1, 2)
x = norm(x)
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
return outs
class DWConv(nn.Module):
def __init__(self, dim=768):
super(DWConv, self).__init__()
self.dwconv = nn.Conv2d(dim, dim, 3, 1, 1, bias=True, groups=dim)
def forward(self, x):
x = self.dwconv(x)
return x
def update_weight(model_dict, weight_dict):
idx, temp_dict = 0, {}
for k, v in weight_dict.items():
if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):
temp_dict[k] = v
idx += 1
model_dict.update(temp_dict)
print(f'loading weights... {idx}/{len(model_dict)} items')
return model_dict
def lsknet_t(weights=''):
model = LSKNet(embed_dims=[32, 64, 160, 256], depths=[3, 3, 5, 2], drop_rate=0.1, drop_path_rate=0.1)
if weights:
model.load_state_dict(update_weight(model.state_dict(), torch.load(weights)['state_dict']))
return model
def lsknet_s(weights=''):
model = LSKNet(embed_dims=[64, 128, 256, 512], depths=[2, 2, 4, 2], drop_rate=0.1, drop_path_rate=0.1)
if weights:
model.load_state_dict(update_weight(model.state_dict(), torch.load(weights)['state_dict']))
return model
if __name__ == '__main__':
model = lsknet_t('lsk_t_backbone-2ef8a593.pth')
inputs = torch.randn((1, 3, 640, 640))
for i in model(inputs):
print(i.size())2、在ultralytics\ultralytics\nn\tasks.py文件中加入lsknet模块
开头先从新建的文件夹引入lsknet的包:
from ultralytics.nn.backbone.lsknet import *并且文件的def _predict_once函数模块要替换为更换网络结构后的预测模块:

替换为:
def _predict_once(self, x, profile=False, visualize=False):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
Returns:
(torch.Tensor): The last output of the model.
"""
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
for _ in range(5 - len(x)):
x.insert(0, None)
for i_idx, i in enumerate(x):
if i_idx in self.save:
y.append(i)
else:
y.append(None)
# for i in x:
# if i is not None:
# print(i.size())
x = x[-1]
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x然后在def parse_model函数模块中进行修改:
由于是更换yolov8原始的网路结构,所以需要在该parse_model函数模块中加入更改网络模块的代码,更改后完整的def parse_model模块代码为:
def parse_model(d, ch, verbose=True, warehouse_manager=None): # model_dict, input_channels(3)
"""Parse a YOLO model.yaml dictionary into a PyTorch model."""
import ast
# Args
max_channels = float('inf')
nc, act, scales = (d.get(x) for x in ('nc', 'activation', 'scales'))
depth, width, kpt_shape = (d.get(x, 1.0) for x in ('depth_multiple', 'width_multiple', 'kpt_shape'))
if scales:
scale = d.get('scale')
if not scale:
scale = tuple(scales.keys())[0]
LOGGER.warning(f"WARNING ?? no model scale passed. Assuming scale='{scale}'.")
depth, width, max_channels = scales[scale]
if act:
Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
if verbose:
LOGGER.info(f"{colorstr('activation:')} {act}") # print
if verbose:
LOGGER.info(f"\n{'':>3}{'from':>20}{'n':>3}{'params':>10} {'module':<45}{'arguments':<30}")
ch = [ch]
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
is_backbone = False
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
try:
if m == 'node_mode':
m = d[m]
if len(args) > 0:
if args[0] == 'head_channel':
args[0] = int(d[args[0]])
t = m
m = getattr(torch.nn, m[3:]) if 'nn.' in m else globals()[m] # get module
except:
pass
for j, a in enumerate(args):
if isinstance(a, str):
with contextlib.suppress(ValueError):
try:
args[j] = locals()[a] if a in locals() else ast.literal_eval(a)
except:
args[j] = a
n = n_ = max(round(n * depth), 1) if n > 1 else n # depth gain
if m in (Classify, Conv, ConvTranspose, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, Focus,
BottleneckCSP, C1, C2, C2f, C3, C3TR, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, RepC3,
C2f_DBB,C2f_DySnakeConv):
if args[0] == 'head_channel':
args[0] = d[args[0]]
c1, c2 = ch[f], args[0]
if c2 != nc: # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, c2, *args[1:]]
if m in (
BottleneckCSP, C1, C2, C2f, C3, C3TR, C3Ghost, C3x, RepC3, C2f_DBB,C2f_DySnakeConv):
args.insert(2, n) # number of repeats
n = 1
elif m is AIFI:
args = [ch[f], *args]
##### 更换网络lsknet ####
elif m in {lsknet_s, lsknet_t}:
m = m(*args)
c2 = m.channel
elif m in (HGStem, HGBlock):
c1, cm, c2 = ch[f], args[0], args[1]
args = [c1, cm, c2, *args[2:]]
if m is HGBlock:
args.insert(4, n) # number of repeats
n = 1
elif m in {GAM_Attention}:
c1, c2 = ch[f], args[0]
if c2 != nc: # if not output
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, c2, *args[1:]]
elif m in {ShuffleAttention}:
c1, c2 = ch[f], args[0]
if c2 != nc: # if not output
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, c2, *args[1:]]
elif m in (
Detect, DetectAux, Pose,Detect_DyHead):
args.append([ch[x] for x in f])
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
elif m in (Detect, Segment, Pose):
args.append([ch[x] for x in f])
if m is Segment:
args[2] = make_divisible(min(args[2], max_channels) * width, 8)
elif m is RTDETRDecoder: # special case, channels arg must be passed in index 1
args.insert(1, [ch[x] for x in f])
else:
c2 = ch[f]
if isinstance(c2, list):
is_backbone = True
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i + 4 if is_backbone else i, f, t # attach index, 'from' index, type
if verbose:
LOGGER.info(f'{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}') # print
save.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if
x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
for _ in range(5 - len(ch)):
ch.insert(0, 0)
else:
ch.append(c2)
return nn.Sequential(*layers), sorted(save)由于我的模型中包含着其他多种改进,所以该ef parse_model函数模块中也包含其他改进的代码,如果出现标红,把标红的改进模块删除即可。
3、创建yolov8+LSKNet.yaml文件:
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 2 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# 0-P1/2
# 1-P2/4
# 2-P3/8
# 3-P4/16
# 4-P5/32
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, lsknet_t, []] # 4
- [-1, 1, SPPF, [1024, 5]] # 5
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 6
- [[-1, 3], 1, Concat, [1]] # 7 cat backbone P4
- [-1, 3, C2f, [512]] # 8
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 9
- [[-1, 2], 1, Concat, [1]] # 10 cat backbone P3
- [-1, 3, C2f, [256]] # 11 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 12
- [[-1, 8], 1, Concat, [1]] # 13 cat head P4
- [-1, 3, C2f, [512]] # 14 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 15
- [[-1, 5], 1, Concat, [1]] # 16 cat head P5
- [-1, 3, C2f, [1024]] # 17 (P5/32-large)
- [[11, 14, 17], 1, Detect, [nc]] # Detect(P3, P4, P5)
四、运行验证

可以看出模型结构已经变成LSKNet的主干网络。
文章来源:https://blog.csdn.net/zmyzcm/article/details/135230829
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Mac之vue cli 2.9.6 卸载与重新安装
- SpringBoot 接口对数据枚举类型的入参以及出参转换处理
- JavaScript中location对象使用【详解】
- 动手学pytorch 线性回归简洁代码
- 计算机基础知识——校验码概述
- 机器人技能学习-构建自己的数据集并进行训练
- 11- OpenCV:自定义线性滤波(卷积,卷积边缘)
- selenium+bs4爬虫案例TapTap游戏帖子
- Invalid bound statement(只有调用IService接口这一层会报错的)
- LINUX基础培训之开机启动过程