MATLAB - 最优控制(Optimal Control)
系列文章目录
前言 -?什么是最优控制?
????????最优控制是动态系统满足设计目标的条件。最优控制是通过执行以下定义的最优性标准的控制律来实现的。一些广泛使用的最优控制方法有:
-
线性二次调节器 (LQR)/线性二次高斯 (LQG) 控制
-
模型预测控制
-
强化学习
-
极值搜索控制
-
H 无穷综合
一、线性二次调节器 (LQR)/线性二次高斯 (LQG) 控制
线性二次调节器 (LQR) 是一种全状态反馈最优控制律,,通过最小化二次代价函数来调节控制系统。
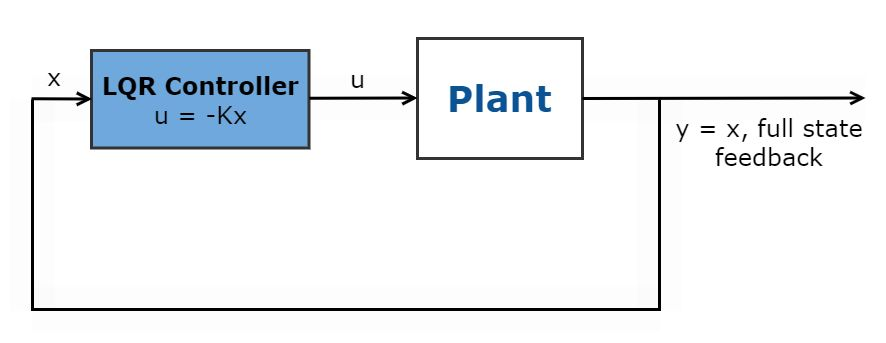
此代价函数取决于系统状态?(x)(�)?和控制输入?(u)(�),如下所示。?
基于性能设定,为此最优控制律设置加权因子 Q、R 和 N,以定义系统状态调节和控制作动成本之间的适当平衡。
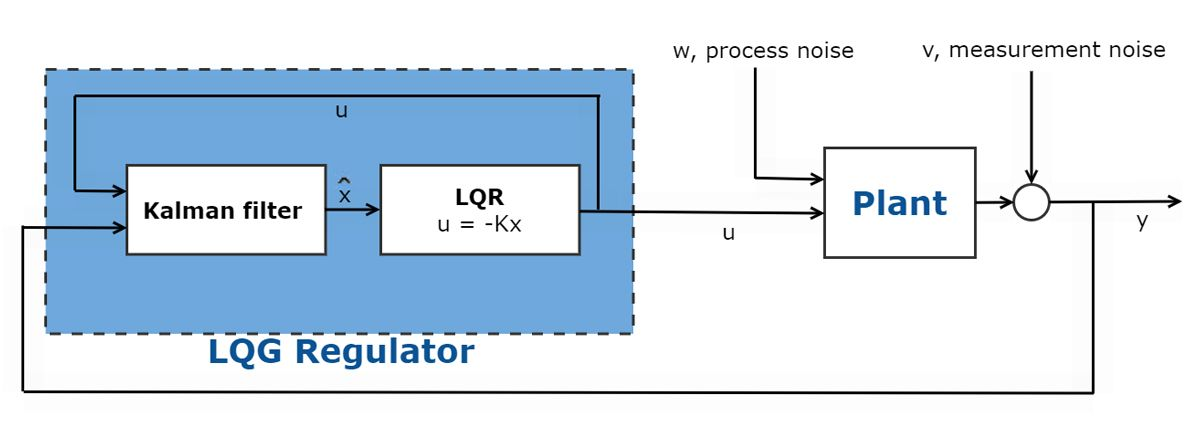
在许多最优控制问题中,并非所有状态可测量。在这些情况下,必须使用观测器来估计状态。卡尔曼滤波器就是使用频率较高的一个观测器。卡尔曼滤波器结合 LQR 控制器构成一个线性二次高斯 (LQG) 控制器。
?
二、模型预测控制
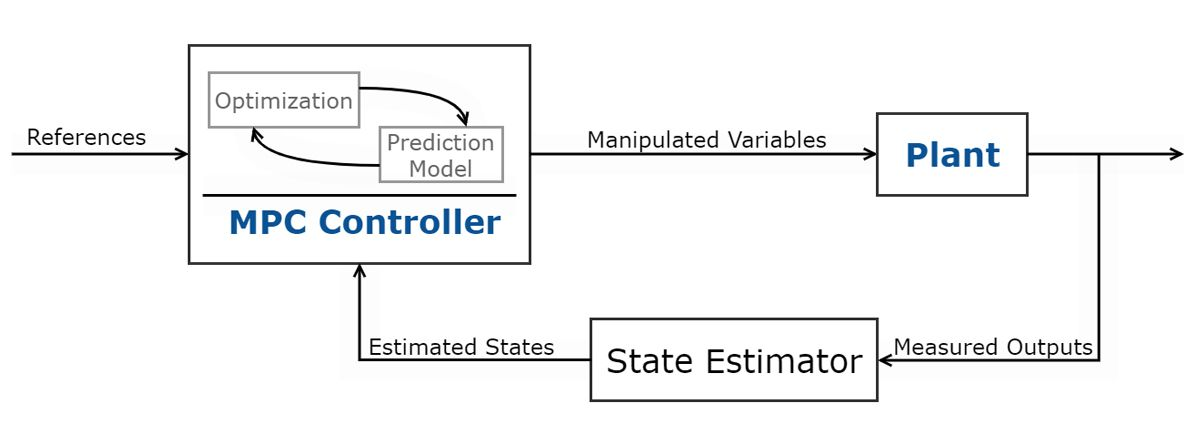
模型预测控制 (MPC) 用于最小化多输入多输出 (MIMO) 系统中的代价函数。该系统受限于输入和输出约束。这种最优控制方法使用系统模型来预测被控对象输出。控制器使用预测的被控对象输出求解在线优化问题,即二次规划,以确定可将预测输出驱动到参考值的可操作变量的最佳调整。MPC 变体包括自适应、增益调度和非线性 MPC 控制器。所使用的 MPC 控制器的类型取决于预测模型(线性/非线性)、约束(线性/非线性)、代价函数(二次/非二次)、吞吐量和采样时间。
微处理器技术和高效算法的进步,使得这种最优控制方法在诸如自动驾驶、航空航天应用中的最佳地形跟踪等应用中得到了更广泛的采用。
三、强化学习
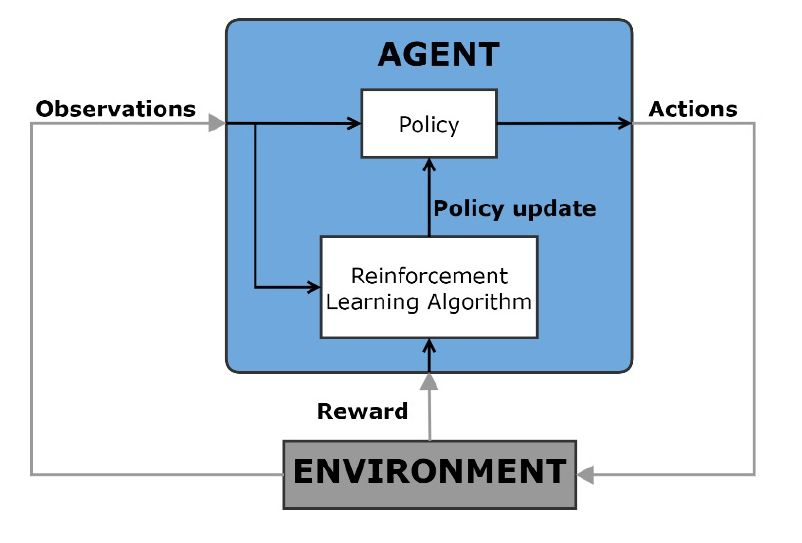
强化学习是一种机器学习方法,其中计算机智能体通过与动态环境的反复试错交互来学习最佳行为。智能体使用来自环境的观测值来执行一系列动作,目的是最大化智能体的任务累积奖励度量。这种学习不需要人工干预,也不需要显式编程。?
这种最优控制方法可用于决策问题,以及用作使用传统控制方法的应用的非线性控制备选方案。这些应用包括自动驾驶、机器人、调度问题和系统的动态标定等。?
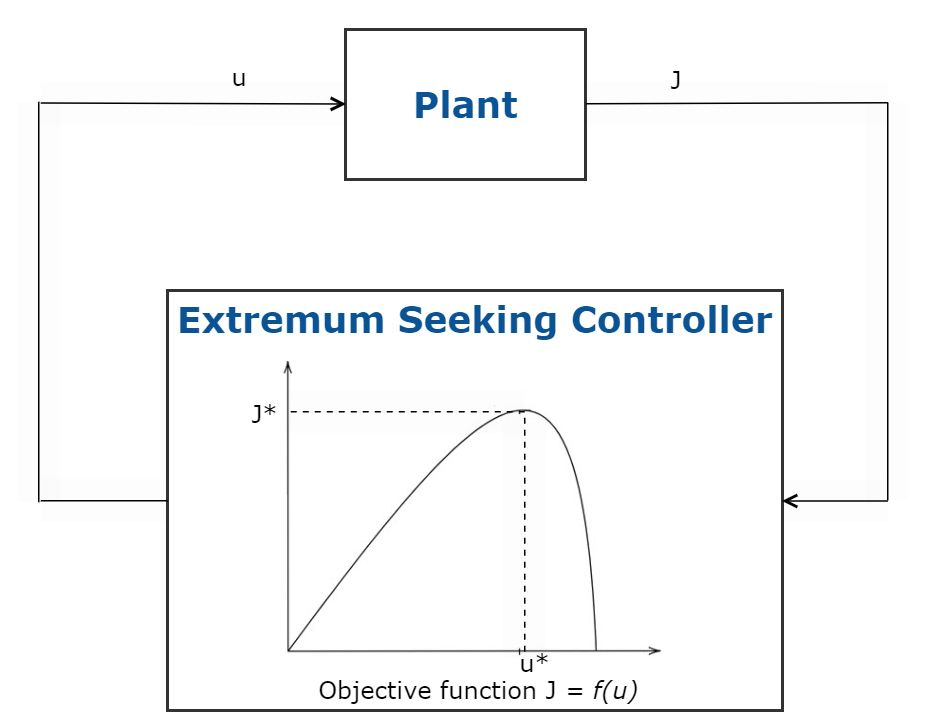
四、极值搜索控制
极值搜索是一种最优控制方法,它使用无模型实时优化自动调整控制系统参数以最大化目标函数。此方法不需要系统模型,可用于参数和扰动随时间缓慢变化的系统。这种最优控制方法适用于稳定的系统。这些系统可以容忍控制中的噪声,并且只需调整少量的控制系统参数。
极值搜索控制的应用包括自适应巡航控制、太阳能电池板的最大功率点追踪 (MPPT) 和防抱死制动系统 (ABS)。
?
五、H 无穷综合
H 无穷综合是一种最优控制工具/方法,用于设计单输入单输出 (SISO) 或 MIMO 反馈控制器,以实现稳健的性能和稳定性。与使用波特或 PID 调节的回路成形等经典控制方法相比,H 无穷更适合需要通道间交叉耦合的多变量控制系统。
对于 H 无穷,控制目标是根据归一化闭环增益来制定的。H 无穷综合会自动计算通过最小化该增益来优化性能的控制器。这很有用,因为许多控制目标可以用最小化增益来表示。其中包括抗扰、对噪声的灵敏度、跟踪、回路成形、回路解耦和稳健稳定性等目标。H 无穷综合的变体可用于处理固定结构或全阶控制器。
下表对上述最优控制方法进行了比较:
| 最优控制方法 | 优化是否在运行时进行?(是/否) | 此最优控制过程的优化过程是如何工作的? | 它是否能处理硬约束?*(可以/不能) | 它是否使用基于模型的方法?(是/否) | 吞吐量如何?(高/低) |
|---|---|---|---|---|---|
| LQR/LQG | 否 | 使用适用于已知线性时不变系统的闭式解 | 不能 | 是 | 高 |
| 隐式 MPC(是) | 使用预测模型,求解在线优化问题以计算最优控制动作 | 可以 | 是 | 低(非线性 MPC),高(线性 MPC) | |
| 显式 MPC(否) | 用于计算最优控制动作的优化问题的解采用离线计算 | 是 | 可以 | 高 | |
| 强化学习 | 是** | 学习任务的最优行为以最大化奖励度量 | 不能*** | 取决于训练算法 | 低(使用训练)、中高(在推断过程中) |
| 极值搜索控制 | 是 | 扰动和调整控制参数以最大化目标函数 | 不能 | 否 | 高 |
| H 无穷综合 | 否 | 自动计算控制器,使其最小化归一化闭环增益 | 不能 | 是 | 高 |
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 数据的确权、流通、入表与监管研究(一):数据与确权(上)
- 基于SSM的在线购物平台
- geolife笔记:比较不同轨迹相似度方法
- [渗透测试学习] Sau - HackTheBox
- MAC相关
- P5740最厉害的学生
- [渗透测试学习] CozyHosting - HackTheBox
- UniRepLKNet实战:使用UniRepLKNet实现图像分类任务(一)
- python&selenium自动化测试实战项目
- 代理IP是什么,代理IP的工作原理是怎么样的?