k8s探针
k8s的pod重启策略
1,Deploy 的yaml文件只能是always。Pod的 yaml三种模式都可以。
2,OnFailure:只有状态码非0才会重启。正常状态不重启的。
3,Never:正常退出和非正常退出都不重启。容器退出了,pod才会重启。
Pod可以有多个容器,只要有一个容器退出,整个pod都会重启,pod内的所有容器都会重启。
Docker的重启策略:
- docker的默认策略是never。
- on-failure:非正常退出。才会重启容器
- Always:只要容器退出都会重启
- Unless-stopped:只要容器退出就会重启,docker守护进程时已经停止的容器,不再重启。
单机部署:docker足够了
集群化部署:k8s
Yaml文件快速生成模版:
![]()
--dry-run=client:只是调用api的对象不执行命令
![]()
![]()
生成pod 的yaml模版
![]()
生成service的yaml模版
pod的状态:
Crashloopbackoff:pod当中的容器退出。Kubelet正在重启。
Imagepullbackoff:正在重试拉取镜像。
Errimagepull:拉取镜像出错了(1网速太慢,2镜像名称写错,3镜像仓库挂了)
Evicte:pod被驱赶(node节点的资源不够部署pod,或者是资源不足,kubelet自动选择一个pod驱逐)
InvalidImageName: ???无法解析镜像名称
ImageInspectError: ??无法校验镜像
ErrImageNeverPull: ??策略禁止拉取镜像
ImagePullBackOff: ???正在重试拉取
RegistryUnavailable: 连接不到镜像中心
ErrImagePull: ???????通用的拉取镜像出错
CreateContainerConfigError: 不能创建kubelet使用的容器配置
CreateContainerError: 创建容器失败
m.internalLifecycle.PreStartContainer 执行hook报错
RunContainerError: ??启动容器失败
PostStartHookError: ??执行hook报错
ContainersNotInitialized: 容器没有初始化完毕
ContainersNotReady: ??容器没有准备完毕
ContainerCreating: ???容器创建中
PodInitializing:pod ??初始化中
DockerDaemonNotReady: ?docker还没有完全启动
NetworkPluginNotReady: 网络插件还没有完全启动
如何对pod内的容器使用节点资源的限制:
- request:需要的资源
- Limit:最高能占用系统多少资源。 limit:需要多少,最多也只能这么多。
对pod的两个限制:
cpu ???内存
Cpu:在k8s集群中限制格式:
- 数字加小数点 ??1可以占用一个CPU ??2可以占用两个 ??0.5占半个CPU ?0.2一个CPU的五分之一 ??要么是整数,要么就是小数点后只能跟一位,最小单位0.1
???m来表示CPU
? ? ? ? CPU时间分片原理:通过周期性的轮流分配CPU时间给各个进程。多个进程可以在CPU上交替执行。在k8s中就是表示占用的CPU的比率。
???M:millicores单位。 100m就是最小单位。
内存:
Ki ??Mi ???Gi ???Ti ??注意大写的。 ?

在创建pod时一定要给容器资源做限制。
k8s怎么设置镜像的拉取策略:
默认策略:
IFNotPresent:如果本地镜像有,就不再拉取,本没有才会去镜像仓库拉取。
Always:不论镜像是否存在,创建时(重启)都会重新拉取镜像。
Never:仅仅使用本地镜像,本地没有也不会主动拉取。

![]()

Pod的容器健康检查:
探针 ?
Probe
K8s对容器执行的定期检查,诊断。
探针有三种规则:
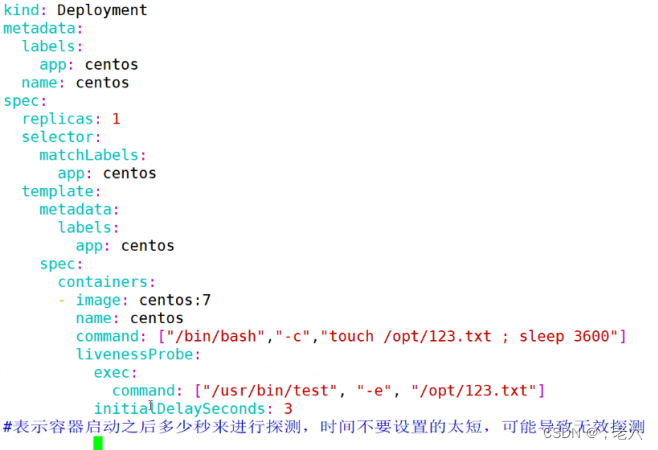
? ? ?1,存活探针:livenessProbe,探测容器是否正常运行,如果发现探测失败,会杀容器,容器会根据重启策略来决定是否重启,不是杀掉pod。
? ? ? 2,就绪探针:探测容器是否进入ready状态,并做好接受请求的准备。
?????????????探测失败 ?READY 0/1 容器当前没有进入ready状态,service会把这个资源对象的端点从当中剔除2,service也不会把请求转发到pod。
? ? ? 3,启动探针:只是在容器的启动开始检测之后开始检测,容器内的应用是否启动成功。在启动探测成功之前,所有的其他的其他探针会处于禁用状态。但是一个启动探针结束,后续的操作不再受启动探针的影响。
在一个容器当中可以有多个探针。
启动探针:只在容器启动时探测
Probe的检测方法:
- exec探针:在容器内部执行命令,如果命令的返回码是0,表示成功。适用于需要在容器内自定义命令来检查容器的健康状况。
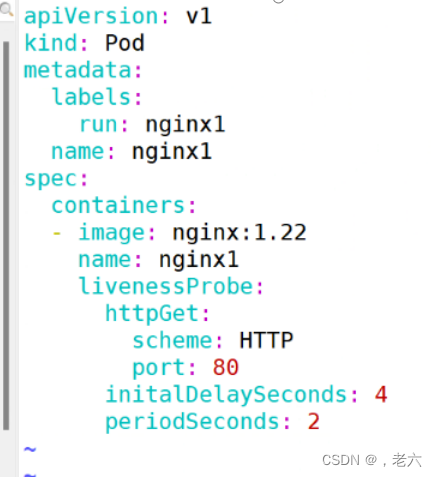
- httpGet:指定ip+端口的容器发送一个httpget的请求。响应状态码大于等于200,小于400都是成功。200-400 ????x >=200<400 ?适用于检测容器能否响应http的请求,web容器(nginx tomcat)
- tcpSocket: 端口,对指定端口上的容器的ip地址进行tcp检查(三次握手)端口打开,认为探测成功。 ?检查特定容器的端口监听状态。
诊断结果:
- 成功 容器通过了,正常运行。
- 失败 存活探针会重启。
- 未知状态 诊断失败。

总结:
探针的三个方法:
存活探针:检查失败之后,会杀死容器,然后重启。探针将伴随整个容器的生命周期。
Exec 相当于执行了一个shell命令:容器里面执行
Shell命令执行成功。
返回码:0表示成功。
成功一次就是探测 成功
Httpcet:对web容器发起一次get请求,可以添加path,指定访问的资源。返回码在大于等于200,小于400 的范围之内都算成功
tcpSocket:相当于 ?指定的容器监听端口是否打开,是否能和指定的容器监听端口进行通信。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- beego的模块篇 - I18n国际化
- python中collections.abc.Mapping 和collections.Mapping的区别
- 第07章_面向对象编程(进阶)(this,继承,方法的重写,权限修饰,super,多态性,Object类的使用,native关键字的理解)
- Ansible剧本playbooks
- 二重积分自变量的范围确定(两种方法)
- 计算机科学速成课【学习笔记】(4)——二进制
- 锂电池的电压和容量怎么计算?
- java练习题之继承(创建对象时属性先赋值输出再执行构造方法)
- 算法基础之区间分组
- redis非关系型数据库