ResNet论文阅读和简单实现
论文:https://arxiv.org/pdf/1512.03385.pdf
Deep Residual Learning for Image Recognition
本模块主要是阅读论文,会做简单的翻译(至少满足我自己能看明白)。
Introduction

由上图可见,在20层和56层的网络上训练的训练误差和测试误差的变化,可以看到层数加深不一定能带来性能上的提升,甚至更糟了。这就引出了文章的疑问(有些和直觉相反的结论):为什么不是层数约多,结果越好呢?文中给出的解释是:梯度消失/爆炸问题从一开始就阻碍了收敛,虽然这一问题已经通过normalized initialization和intermediate normalization layers在很大程度上得到了解决,这使得几十层的网络可以收敛,但是当层数逐渐增加,出现了“退化”问题(degradation)。这里的“退化”指的是,随着网络的加深,accuracy先逐渐升高到达饱和,然后迅速衰退。文中指出这一问题并非由过拟合导致(并不是模型过于复杂)。这一问题也说明了,我们并不能简单的认为通过堆叠层数来优化模型。

论文中通过引入一个deep residual learning框架(深度残差)。并不使用简单堆叠层数来获得一个满意的潜在映射,而是让这些层复合残差映射。
定义:
H(x):满意的潜在映射
F(x):堆叠的非线性层产生的映射,并且满足关系F(x) := H(x) - x
原始映射:F(x) + x
假设优化残差映射要比优化原始映射更容易。极端点来说,对于一个恒等映射,将残差推到0要比吧非线性层推到0更简单(不记得在哪里听到过,理论上,通过增加层数的方法来改善模型非常符合直觉,因为我们直觉上觉得可以无限的加y=x这样的变换,来无限制的增加层数。但是就像论文中描写的那样,我们并没有得到更高的准确度,而是出现了退化现象,这可能是因为DL太善于计算非线性了,反而没办法在线性上给一个比较好的表现,我觉得这是一个直觉上比较好的解释,故在此记录)。
F(x) + x这一形式在前馈神经网络中可以采用“shortcut connections”来实现。这里所谓的“shortcut connections”指的是跳过一层或多层。在本文中,这种连接仅仅是做“identity mapping”(恒等映射:在数学中,指一个函数将每个元素映射到其自身,即输入和输出相等的映射。),这一做法并不会增加额外的参数,也不会增加计算的复杂度(反正y=x也没什么影响,也没必要更新),这就使得整个网络仍然可以采用反向传播SGD进行end-to-end的训练。文章中提到,采用的152层的网络虽然比之前的VGG网络要深,但是实际上并没有那么复杂。
Deep Residual Learning
Residual Learning
在前面的定义中(H(x):满意的潜在映射)。让我们先把H(x)看做是由几个堆叠的层拟合的潜在映射(这里的几个不一定指的是整个网络),那么此时x表示的就是这些层中第一层的输入。假设多个非线性层可以逐渐逼近residual function(即H(x)- x,假设输入和输出的dimension相同,这里看起来有点autoencoder那个感觉)。因此,与其期待用堆叠的层去近似H(x),不如让这些层去拟合residual function F(x) := H(x) - x。尽管这两种形式都应该能够渐进地逼近所需的函数(如假设的那样),但学习的难易程度可能有所不同。
简单来说就是,不再直接的拟合函数,而是拟合残差函数,并且这么做的原因是这样更容易学。
如果添加的层可以构造为identity mapping(恒等映射),那么较深的模型的训练误差不应该大于较浅的模型。退化问题表明,在逼近多个非线性层的恒等映射时可能存在困难。使用residual方法之后,如果恒等映射是最优的,那么就可以简单的把多个非线性层的权重向0逼近,这就近似于恒等变换。
Identity Mapping by Shortcuts
对每个堆叠在一起的层(every few stacked layers)使用residual learning,构建出building block。将这个building block定义为:
y = F(x, {W_i}) + x
x, y:对应的堆叠在一起的层的输入和输出。
F(x, {W_i}):学到的residual mapping(我们最后想得到的是H(x),但是这里学到的是F(x, {W_i}),也就是H(x) - x,但是没有关系,我们最后输出的是F(x, {W_i}) + x,也就是H(x) - x + x,这种思路很像小时候做那种数列找规律求和,虽然直接算很难算,但是可以加上一项之后先算出来结果,最后再把加上来的项去掉)
在figure 2中,我们有两层,也就是,这里σ代表ReLU,为了简化,这里省略了bias。F+x采用shortcut connection和element-wise addition(简单来说就是直接拽过来加上,既然要拽过来直接加,那么一定要满足维度的一致)。这种方法既不引入额外的参数,也不增加计算复杂度。那么如果我们要改变输入输出的通道数时,可以执行一个线性投影:
F(x, {W_i})可以表示多层的卷积。
Network Architectures

卷积层大多具有3×3滤波器,并遵循两个简单的设计规则:(i)对于相同的输出特征图大小,各层具有相同数量的滤波器;(ii)如果特征图大小减半,则滤波器的数量增加一倍,以保持每层的时间复杂度。我们通过步长为2的卷积层直接执行下采样。网络以一个全局平均池化层和一个带有softmax的1000路全连接层结束。图3(中)加权层总数为34层。

对中间的plain network,增加shortcut connections,就能改成residual版本。当输入输出维度相同时,可以直接使用identity shortcut(Eqn.(1))(y = F(x, {W_i}) + x)
当维度增加时(图3中的虚线快捷方式),我们考虑两个方案:
(A)快捷方式仍然执行恒等映射,为增加维度填充额外的0。这个方案不引入额外的参数;
(B) 中的投影shortcut用于匹配维度(通过1×1卷积完成)。
对于这两个方案,当快捷键跨越两个大小的特征映射时,它们的步幅为2。
Implementation
从图像或其水平翻转中随机采样224×224裁剪,并减去每像素平均值。使用中的标准颜色增强。在每次卷积之后和激活之前采用批归一化(BN)。初始化权重,并从头开始训练所有的plain/residual网络。使用SGD的小批量大小为256。学习率从0.1开始,当误差趋于平稳时除以10,模型的训练次数可达60 × 104次。
Experiments
Deeper Bottleneck Architectures

对于每个残差函数F,我们使用3层而不是2层的(图5)。这三层是1×1, 3×3和1×1卷积,其中1×1层负责减少然后增加(恢复)维度,使3×3层成为输入/输出维度较小的瓶颈。图5给出了一个例子,其中两种设计具有相似的时间复杂度。无参数标识快捷方式对于瓶颈体系结构尤其重要。如果将图5(右)中的标识快捷方式替换为投影,可以看出,由于shortcut连接到两个高维端点,时间复杂度和模型尺寸都增加了一倍。
关于论文的理解
卷积后特征图尺寸变化:H_out = (H_in + 2P - K) / S + 1
转载神经网络学习小记录20——ResNet50模型的复现详解_resnet50复现-CSDN博客末尾的resnet50结构图

同时针对之前论文中的结构图,要说明的是,有部分内容上面的结构图和论文都没有直接说明,比如conv1_x中需要加padding,否则(224-7)/2+1是没办法成112的,这里padding=3,conv2_x中stride=1,其他stride=2(比如56->28,(56-1)/2+1=28)
注意,在每一个小的block里面有些直接计算发现数字不对的,都是加了padding。
比如,conv2_x里面3×3那个就加了padding=1
代码实现
1
参考:https://www.youtube.com/watch?v=DkNIBBBvcPs
import torch
import torch.nn as nn
class block(nn.Module):
def __init__(self, inchannels, out_channels, identity_downsample=None, stride=1):
super(block, self).__init__()
# 每一个resnet的block的输入和输出的通道数的比值都是1/4,也就是说通道数扩大了4倍
self.expension = 4
self.conv1 = nn.Conv2d(inchannels, outchannels, kernel_size=1, stride=1, padding=0)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(outchannels, outchannels, kernel_size=3, stride=stride, padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)
self.conv3 = nn.Conv2d(outchannels, outchannels*self.expansion, kernel_size=1, stride=1, padding=0)
self.bn3 = nn.BatchNorm2d(out_channels*self.expansion)
self.relu = nn.ReLU()
self.identity_downsample = identity_downsample
def forward(self, x):
identity = x
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.conv3(x)
x = self.bn3(x)
if self.identity_downsample is not None:
identity = self.identity_downsample(identity)
# 方案A or 方案B
x += identity
x = self.relu(x)
return x
class ResNet(nn.Module):
def __init__(self, block, layers, image_channels, num_classes):
super(ResNet, self).__init__()
# 在res50中block的堆叠是3 4 6 3
# conv1_x
# 刚刚输入的时候channel是3,在这里conv一下转成64
self.in_channels = 64
self.conv1 = nn.Conv2d(image_channels, 64, kernel_size=7, stride=2, padding=3)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU()
# conv2_x
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
# 理论上我们在这里就可以开始一层一层写了,比如:
# self.layer1 = ...
# self.layer2 = ...
# 直接定义一个函数替我们写
self.layer1 = self._make_layer(block, layer[0], out_channel=64, stride=1)
self.layer2 = self._make_layer(block, layer[1], out_channel=128, stride=2)
self.layer3 = self._make_layer(block, layer[2], out_channel=256, stride=2)
self.layer4 = self._make_layer(block, layer[3], out_channel=512, stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(512*4, num_classes)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.reshape(x.shape[0], -1)
x = self.fc(x)
return x
def _make_layer(self, block, num_residual_block, out_channels, stride):
identity_downsample = None
layers = []
# 如果不能直接相加(channel数量变化了)
# 比如说conv2_x中的第一个block,输入64输出256,这种显然没办法把64硬加到256上
if stride != 1 or self.inchannels != out_channels*4:
identity_downsample = nn.Sequential(nn.Conv2(self.in_channels, out_channels*4, kernel_size=1,
stride=1),
nn.BatchNorm2d(out_channels*4))
layers.append(block(self.inchannels, out_channels, identity_downsample, stride))
self.inchannels = out_channels*4
for i in range(num_residual_block-1):
layers.append(block(self.in_channels, out_channels))
return nn.Sequential(*layers)
def ResNet50(img_channels, num_classes=1000):
return ResNet(block, [3,4,6,3], img_channels, num_classes)
2
神经网络学习小记录20——ResNet50模型的复现详解_resnet50复现-CSDN博客
https://github.com/pytorch/vision/blob/main/torchvision/models/resnet.py
ResNet50 with PyTorch | Kaggle
GitHub - JayPatwardhan/ResNet-PyTorch: Basic implementation of ResNet 50, 101, 152 in PyTorch
3
Writing ResNet from Scratch in PyTorch
与1中的类似,引用如下:
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride = 1, downsample = None):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size = 3, stride = stride, padding = 1),
nn.BatchNorm2d(out_channels),
nn.ReLU())
self.conv2 = nn.Sequential(
nn.Conv2d(out_channels, out_channels, kernel_size = 3, stride = 1, padding = 1),
nn.BatchNorm2d(out_channels))
self.downsample = downsample
self.relu = nn.ReLU()
self.out_channels = out_channels
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.conv2(out)
if self.downsample:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes = 10):
super(ResNet, self).__init__()
self.inplanes = 64
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size = 7, stride = 2, padding = 3),
nn.BatchNorm2d(64),
nn.ReLU())
self.maxpool = nn.MaxPool2d(kernel_size = 3, stride = 2, padding = 1)
self.layer0 = self._make_layer(block, 64, layers[0], stride = 1)
self.layer1 = self._make_layer(block, 128, layers[1], stride = 2)
self.layer2 = self._make_layer(block, 256, layers[2], stride = 2)
self.layer3 = self._make_layer(block, 512, layers[3], stride = 2)
self.avgpool = nn.AvgPool2d(7, stride=1)
self.fc = nn.Linear(512, num_classes)
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes, kernel_size=1, stride=stride),
nn.BatchNorm2d(planes),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.maxpool(x)
x = self.layer0(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
num_classes = 10
num_epochs = 20
batch_size = 16
learning_rate = 0.01
model = ResNet(ResidualBlock, [3, 4, 6, 3]).to(device)
# Loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate, weight_decay = 0.001, momentum = 0.9)
# Train the model
total_step = len(train_loader)
Layers in PyTorch
Now coming to the different types of layers available in PyTorch that are useful to us:
nn.Conv2d: These are the convolutional layers that accepts the number of input and output channels as arguments, along with kernel size for the filter. It also accepts any strides or padding if we want to apply thosenn.BatchNorm2d: This applies batch normalization to the output from the convolutional layernn.ReLU: This is a type of ?activation function applied to various outputs in the networknn.MaxPool2d?: This applies max pooling to the output with the kernel size givennn.Dropout: This is used to apply dropout to the output with a given probabilitynn.Linear: This is basically a fully connected layernn.Sequential: This is technically not a type of layer but it helps in combining different operations that are part of the same step
看起来和之前的resnet50不太一样的原因是这里是34层的。
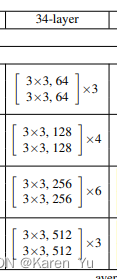
因此这里没有313这样的结构了。但是本质上是一样的。
————————————————————————————
一些题外话,虽然在很多地方看到说resnet已经是很老的模型了,但是相比于之前的CNN方法而言,在方法上确实是非常厉害的创新,虽然现在似乎CNN已经被调侃的像上世纪的产物了orz。似乎现在已经是transformer的天下了……
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【论文笔记】ImGCL:Revisiting Graph Contrastive Learning on Imbalanced Node Classification(简要笔记供复习使用)
- 批量修改文件名为123456,怎么操作?
- 性能分析与调优: Linux 性能分析60秒
- 购买cdn节点怎么接入服务器-速盾网络
- 网页版短信系统功能简介|短信平台开发源码搭建
- 单点登录:描述:从后台管理系统跳转到前台系统
- UOS python+pyqt5实现COM和LPT回路测试
- SQL Server从0到1——报错注入
- C 语言函数完全指南:创建、调用、参数传递、返回值解析
- 【C语言(十四)】