CANoe
CANoe简介
CANoe是Vector公司推出的一款集总线仿真、测试、分析和诊断等功能为一体的图形化开发环境。CANoe全称为CAN open environment,最初主要为汽车CAN总线的开发、仿真、测试和分析而设计。随着车载总线的发展,扩展加入了LIN、FlexRay、MOST和Ethernet等网络。CANoe软件采用一个正在划行的独木舟(取英文canoe之意)作为图标。

CANoe目前已发展为多总线 支 持 工 具 , 支 持 的 总 线 包 括 CAN 、 LIN 、 FlexRay 、 MOST 、Ethernet、AFDX、ARINC 429和SAE J1708,以及基于CAN总线协议的SAE J1939、SAE J1587、ISO 11783、NMEA 2000、ARINC 825、CANaerospace和CANopen等。
CANoe是网络和ECU开发、测试和分析的专业工具,支持总线网络开发从需求分析到系统实现的整个开发过程。CANoe丰富的功能和配置选项被整车厂和供应商的网络设计工程师、开发工程师和测试工程师所广泛使用。在项目开发的各个不同阶段,CANoe发挥的作用也不相同。
CANoe在ECU项目开发中的作用
CANoe在ECU项目开发中的作用,根据车载ECU项目的开发进度可以分为以下三个阶段:
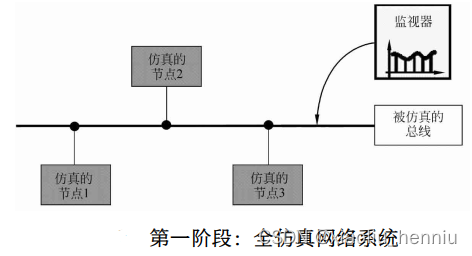
第一阶段:全仿真网络系统
在开发的初期阶段,CANoe可以用于建立仿真模型,在此基础上进行ECU的功能评估,这样就可以尽早地发现问题并解决问题。CANoe主要是针对有具体数据定义的报文进行事件处理,也就是借助CAPL实现网络节点的行为。CAPL是专门为CANoe设计的一种类似于C的语言,利用它可以对报文的接收、系统变量/环境变量的改变、错误的出现等事件进行处理。同时由于CANoe的开放性,用户可以使用现有的成熟算法、函数和模型扩充自己函数的功能。对于复杂模型,甚至还可以通过其他的建模工具(如MATLAB)。另外,在这个阶段,可以利用所设计的完整网络仿真系统进行离线的仿真,检验各个节点功能的完整性及网络的合理性。下图为CANoe全仿真网络系统示意图,所有节点均为仿真节点。
第二阶段:真实节点和部分仿真节点共存
在第一阶段结束后,用户能得到整个网络的系统功能模型。接下来,用户可以将自己开发的真实ECU节点替换仿真系统中对应的仿真节点,利用总线接口和CANoe剩余的节点相连接,测试自己节点的功能,如通信、纠错等。出于这样的原因,在很多场合项目组成员习惯将CANoe仿真工程称为RBS(Rest Bus Simulation,剩余总线仿真),某些地方使用Remaining Bus Simulation。这样,每个供应商的节点可以并行开发,不受其他节点开发进程的影响。如图为CANoe真实节点和部分仿真节点共存的网络系统示意图,部分节点已经被真实节点替换。

第三阶段:全真实节点的网络系统
在开发的最后阶段,所有ECU的真实节点都被逐一地连接到总线系统中,此前的仿真节点会被逐一从总线上断开。开发者可以在真实节点的条件下,验证总线的负载情况和其他的设计要求是否满足。在这个阶段,CANoe主要充当网络系统分析、测试和诊断的工具。在这个过程中,整个系统包括各个功能节点都能被详细地检查到。由于利用仿真节点代替真实的网络节点是最理想的状态,所以通过这两种状态的切换可以交叉检查相关功能,快速定位问题的根源。下图为CANoe全真实节点的网络系统示意图,所有节点已经被真实节点替换。

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- [机缘参悟-132] :《洞见》:为什么佛学是真的 -3- 冥想,洞见自己的内心
- 企业实现数字化有哪些好处?(上)
- 51单片机模数转换ADC原理与代码一
- 工厂模式实现
- [Python进阶] 消息框、弹窗:批处理消息框\msg
- webpack 核心武器:loader 和 plugin 的使用指南(下)
- LeetCode、2300. 咒语和药水的成功对数【中等,排序+二分】
- 浅谈中低压母线装设弧光保护的必要性
- HACKTHEBOX通关笔记——Poison(退役)
- Navicat迁移局域网内其他PC机的MySQL数据库