李沐机器学习系列1--- 线性规划
1 Introduction
1.1 线性回归函数
典型的线性回归函数
f
(
x
)
=
w
?
?
x
?
f(x)=\vec{w} \cdot \vec{x}
f(x)=w?x
现实生活中,简单的线性回归问题很少,这里有一个简单的线性回归问题。房子的价格和房子的面积以及房子的年龄假设成线性关系。
p
r
i
c
e
=
w
a
r
e
a
?
a
r
e
a
+
w
a
g
e
+
b
price = w_{area}*area + w_{age}+b
price=warea??area+wage?+b
1.2 损失函数
确定了变量和结果之间的大致关系以后,我们需要通过优化的方法进行迭代优化求解。
让我们从优化的角度来看这个问题。
c
o
s
t
=
0.5
∑
i
n
(
w
?
?
x
?
y
i
)
T
Q
(
w
?
?
x
?
y
i
)
cost = 0.5\sum_i^n(\vec{w}*x-y^{i})^TQ(\vec{w}*x-y^{i})
cost=0.5i∑n?(w?x?yi)TQ(w?x?yi)
这是一个典型的QP问题,可以使用迭代的方法找到最优解。
在QP问题中,往往采用wolfe规则,但是这往往使用到全部的数据,在大规模的机器没有办法这么做,采用SGD的方法。
1.3 随机梯度下降
对于方程求解问题,典型的方法是牛顿迭代法。
基础的牛顿迭代法可以这么理解:
0
?
f
(
x
i
)
=
f
′
(
x
i
)
(
x
i
+
1
?
x
i
)
x
i
+
1
=
x
i
?
f
(
x
i
)
f
′
(
x
i
)
\begin{aligned} 0-f(x_i) &=f'(x_i)(x_{i+1}-x_i) \\ x_{i+1}&=x_i-\frac{f(x_i)}{f'(x_i)} \end{aligned}
0?f(xi?)xi+1??=f′(xi?)(xi+1??xi?)=xi??f′(xi?)f(xi?)??
对于这个符号,从直觉的角度理解,对于一个单调函数,如果f(x_i)和f’(x_i)要是同方向,就会离稳态越来越远,所以需要添加符号来保持稳态。使用简单的牛顿迭代法,参数会变化太大,所以在步长的选择上,有很多trick。
对于一个凸函数来说,梯度方向是让函数值升高的最快方向,对于一个非凸函数,梯度方向可能会导致求解进入局部最大值或者鞍点。
w
′
=
w
?
λ
f
′
(
x
)
w
′
=
w
?
λ
β
∑
i
∈
β
x
(
i
)
(
w
T
x
(
i
)
+
b
?
y
(
i
)
)
b
′
=
b
?
λ
β
∑
i
∈
β
(
w
T
x
(
i
)
+
b
?
y
(
i
)
)
\begin{aligned} w' &=w-\lambda f'(x) \\ w' &= w-\frac{\lambda}{\beta}\sum_{i\in \beta}x^{(i)}(w^Tx^{(i)}+b -y^{(i)}) \\ b' & = b-\frac{\lambda}{\beta}\sum_{i\in \beta}(w^Tx^{(i)}+b -y^{(i)}) \\ \end{aligned}
w′w′b′?=w?λf′(x)=w?βλ?i∈β∑?x(i)(wTx(i)+b?y(i))=b?βλ?i∈β∑?(wTx(i)+b?y(i))?
1.3 正态分布与平方损失
每个参数可能会有一定的噪声,噪声正态分布如下:
y
=
w
?
T
x
?
+
b
+
?
?
∈
N
(
0
,
σ
2
)
\begin{aligned} y &=\vec{w}^T\vec{x}+b+\epsilon \\ \epsilon& \in N(0, \sigma^2) \end{aligned}
y??=wTx+b+?∈N(0,σ2)?
给定的x观察到特定的y的似然
p
(
y
∣
x
)
=
1
2
π
σ
2
e
x
p
(
?
1
2
σ
2
(
y
?
w
?
T
x
?
?
b
)
2
)
\begin{aligned} p(y|x)&=\frac{1}{\sqrt{2\pi \sigma^2}}exp(-\frac{1}{2\sigma^2}(y-\vec{w}^T\vec{x}-b)^2) \end{aligned}
p(y∣x)?=2πσ2?1?exp(?2σ21?(y?wTx?b)2)?
每个点都是独立同分布
P
(
y
∣
X
)
=
∏
i
=
1
n
(
p
(
y
i
∣
x
i
)
)
P(y|X)=\prod_{i=1}^n(p(y^{i}|x^i))
P(y∣X)=i=1∏n?(p(yi∣xi))
进行对数
?
l
o
g
P
(
y
∣
X
)
=
∑
i
=
1
n
0.5
l
o
g
(
2
π
σ
2
)
+
1
2
σ
2
(
y
i
?
w
T
x
i
?
b
)
2
-logP(y|X)=\sum_{i=1}^n0.5log(2\pi \sigma^2)+\frac{1}{2\sigma^2}(y^i-w^Tx^i-b)^2
?logP(y∣X)=i=1∑n?0.5log(2πσ2)+2σ21?(yi?wTxi?b)2
2 线性回归从零开始实现
2.1 生成数据
def generate_data(w, b, num_examples):
x = torch.norm(0, 1, (num_examples, len(w)))
y = torch.matmul(w, x) + b
y += torch.norm(0, 0.01, y.shape())
return x, y.reshape((-1, 1))
2.2 batch size data selector
def data_iter(features, labels, batch_size=10):
num_examples = len(features)
indices = list(range(num_examples))
random.shuffle(indices)
for i in range(0, num_examples, batch_size):
batch_indices = torch.tensor(
indices[i:min(i + batch_size, num_examples)])
yield(features[batch_indices], labels[batch_indices]
2.3 定义网络和loss
sgd 和优化中的方法的区别,sgd利用部分样本,采用迭代的方式,进行优化;传统的优化方法,如qp或者sqp则对全部的样本的loss进行迭代,并且迭代过程中,会同时优化步长;
def linreg(x, w, b):
y = torch.matmul(x, w) + b
return y
def loss(y_hat, y):
l = 0.5 * (y - y_hat) ** 2
return l
w = torch.normal(0, 0.1, size=(2,1), requires_grad=True)
b = torch.zeros(1, requires_grad=True)
def sgd(params, lr, batch_size):
with torch.no_grad():
for param in params:
param -= lr * param.grad / batch_size
param.grad.zero_()
一定要在参数更新这里将param.grad.zero_()
2.4 进行训练
num_epochs = 3
net = linreg
lr = 0.02
batch_size = 10
for epoch in range(num_epochs):
for x, y in data_iter(features, labels, batch_size):
l = loss(y, net(x, w, b))
l.sum().backward()
sgd([w, b], lr, batch_size)
with torch.no_grad():
predicted = net(features, w, b)
mse = ((predicted - labels) ** 2).mean()
print("epoch ", epoch, " MSE: ", mse.item())
3 使用pytorch进行简化
3.1 数据选择器
# 定义迭代器
def data_selector(data_arrays, batch_size, is_train=True):
dataset = data.TensorDataset(*data_arrays)
return data.DataLoader(dataset, batch_size, shuffle=is_train)
batch_size = 10
data_iter = data_selector((features, labels), batch_size, True)
3.2 网络
# 定义各种函数
from torch import nn
net = nn.Sequential(nn.Linear(2, 1))
# 初始化数值
net[0].weight.data.normal_(0, 0.01)
net[0].bias.data.fill_(0)
# 定义损失函数
loss = nn.MSELoss()
# 使用优化算法
trainer = torch.optim.SGD(net.parameters(), lr=0.03)
采用框架,参数被封装在了net中,在定义sgd训练,使用net.parameters()传递参数
3.3 训练
num_epochs = 3
for epoch in range(num_epochs):
for x, y in data_iter:
l = loss(net(x), y)
trainer.zero_grad()
l.sum().backward()
trainer.step()
l = loss(net(x), y)
print(f'epoch {epoch}, loss {l: f}')
4 softmax
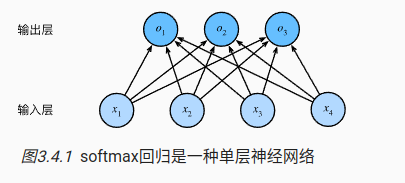
我们在机器学习中经常会遇到分类问题,每个种类都自己的预测结果。
o
?
=
W
?
x
?
+
b
?
\vec{o}=\vec{W}\vec{x}+\vec{b}
o=Wx+b
4.1 softmax运算
如果只是这样简单的全连接层计算,会产生一个问题,输出的累计和并不等于1。但是我们的标签的总和是1.
为了让总和为1,每项的输出范围为[0,1],并且使用exp求导的时候更加简单
s
o
f
t
m
a
x
(
x
)
=
e
x
p
(
o
?
i
)
∑
i
=
0
n
(
e
x
p
(
o
?
i
)
)
softmax(x)=\frac{exp(\vec{o}_i)}{\sum_{i=0}^n(exp(\vec{o}_i))}
softmax(x)=∑i=0n?(exp(oi?))exp(oi?)?
我们在做决策的时候,输出最大概率项
4.2 损失函数
使用最大似然估计
?
l
o
g
P
(
Y
∣
X
)
=
∑
i
=
1
n
?
l
o
g
P
(
y
(
i
)
∣
x
(
i
)
)
=
∑
i
=
1
n
l
(
y
(
i
)
,
y
^
(
i
)
)
-logP(Y|X)=\sum_{i=1}^n-logP(y^{(i)}|x^{(i)})=\sum_{i=1}^nl(y^{(i)},\hat{y}^{(i)})
?logP(Y∣X)=i=1∑n??logP(y(i)∣x(i))=i=1∑n?l(y(i),y^?(i))
理解不了,以后再说。
- 熵
知道真实概率的人所经历的惊异程度
H [ P ] = ∑ j ? P ( j ) l o g P ( j ) H[P]=\sum_j-P(j)logP(j) H[P]=j∑??P(j)logP(j)
4.3 训练代码
- 数据
# 使用pytorchvision 下载数据
# iterator
trans = transforms.ToTensor()
mnist_train = torchvision.datasets.FashionMNIST(
root="../data", train=True, transform=trans, download=True)
mnist_test = torchvision.datasets.FashionMNIST(
root="../data", train=False, transform=trans, download=True)
image, label = mnist_train[0]
train_iter = data.DataLoader(mnist_train, 32, shuffle=True,
num_workers=4)
test_iter = data.DataLoader(mnist_test, 32, shuffle=True,
num_workers=4)
for x, y in train_iter:
break
- 定义网络结构
这里要注意,pytorch上,采用nnum_inputs这种输入结构,输出结构1num_outputs
# 定义网络结构,输入结构是o=W*x+b, x是[n * 784], w = 784 * 10, b = 1 * 10
num_inputs = 784
num_outputs = 10
w = torch.normal(0, 0.01, (num_inputs, num_outputs), requires_grad=True)
b = torch.zeros(num_outputs, requires_grad=True)
print(w.shape, b.shape)
- 定义softmax函数
# 定义关键函数softmax, 两个样本
x = torch.tensor([[1.0, 2.0, 3.0], [4.0, 5.0, 6.0]])
y = torch.tensor([0, 2])
print(x[[0, 1], y])
# -log,这里的keepdim非常关键,这样才能保证两个数组的维度相同,可以对应上
def softmax(x):
x_exp = torch.exp(x)
partition = x_exp.sum(axis=1, keepdim=True)
# print(partition.shape)
return x_exp / partition
p_x = softmax(x)
print(p_x)
- 定义loss
# 自定义模型
# 这里需要对x进行reshape,因为x很可能是乱的,需要reshape成n*num_inputs这种类型的
def net(x):
return softmax(torch.matmul(x.reshape((-1, w.shape[0])), w) + b)
# 定义损失函数
# 这里采用了小技巧,二维数组中,使用两个等长的向量,可以快捷的索引元素
def crossEntropy(y_hat, y):
return -torch.log(y_hat[range(len(y_hat)), y])
y = torch.tensor([0, 2])
y_hat = torch.tensor([[0.1, 0.3, 0.6], [0.3, 0.2, 0.5]])
crossEntropy(y_hat, y)
- 评估训练中的精度
# 记录分类精度, 用argmax(y_hat)==y, 记录是否正确
def accuracy(y_hat, y):
# 防止y_hat采用概率, 并且有多个类别
if len(y_hat.shape) > 1 and y_hat.shape[1] > 1:
y_hat = y_hat.argmax(axis=1)
cmp = y_hat.type(y.dtype) == y
return float(cmp.type(y.dtype).sum())
# 用总数和预测值进行比较
accuracy(y_hat, y) / len(y)
#创建一个通用的评估器
class Accumulator:
def __init__(self, n):
self.data = [0.0] * n
# 解决各种不同类型元素累加的trick
def add(self, *args):
self.data = [a + float(b) for a, b in zip(self.data, args)]
def reset(self):
self.data = [0.0] * len(self.data)
def __getitem__(self, i):
return self.data[i]
def evaluate_accuracy(net, data_iter):
if isinstance(net, torch.nn.Module):
net.eval() # 将模型设置为评估模式
metrics = Accumulator(2)
with torch.no_grad():
for x, y in data_iter:
metrics.add(accuracy(net(x), y), y.numel())
return metrics[0] / metrics[1]
evaluate_accuracy(net, test_iter)
- 进行训练
#进行训练
lr = 0.1
def updater(batch_size):
return d2l.sgd((w, b), lr, batch_size)
def train_epoch_ch3(net, train_iter, loss, updater):
if isinstance(net, torch.nn.Module):
net.train()
metric = Accumulator(3)
for x, y in train_iter:
y_hat = net(x)
l = loss(y_hat, y)
if isinstance(updater, torch.optim.Optimizer):
updater.zero_grad()
l.mean().backward()
updater.step()
else:
l.sum().backward()
updater(x.shape[0])
metric.add(l.sum(), accuracy(y_hat, y), y.numel())
return metric[0] / metric[2], metric[1] / metric[2]
- 其他内容
class Animator: #@save
"""在动画中绘制数据"""
def __init__(self, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), nrows=1, ncols=1,
figsize=(3.5, 2.5)):
# 增量地绘制多条线
if legend is None:
legend = []
d2l.use_svg_display()
self.fig, self.axes = d2l.plt.subplots(nrows, ncols, figsize=figsize)
if nrows * ncols == 1:
self.axes = [self.axes, ]
# 使用lambda函数捕获参数
self.config_axes = lambda: d2l.set_axes(
self.axes[0], xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
self.X, self.Y, self.fmts = None, None, fmts
def add(self, x, y):
# 向图表中添加多个数据点
if not hasattr(y, "__len__"):
y = [y]
n = len(y)
if not hasattr(x, "__len__"):
x = [x] * n
if not self.X:
self.X = [[] for _ in range(n)]
if not self.Y:
self.Y = [[] for _ in range(n)]
for i, (a, b) in enumerate(zip(x, y)):
if a is not None and b is not None:
self.X[i].append(a)
self.Y[i].append(b)
self.axes[0].cla()
for x, y, fmt in zip(self.X, self.Y, self.fmts):
self.axes[0].plot(x, y, fmt)
self.config_axes()
display.display(self.fig)
display.clear_output(wait=True)
- 进行训练
def train_ch3(net, train_iter, test_iter, loss, num_epochs, updater): #@save
"""训练模型(定义见第3章)"""
animator = Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0.3, 0.9],
legend=['train loss', 'train acc', 'test acc'])
for epoch in range(num_epochs):
train_metrics = train_epoch_ch3(net, train_iter, loss, updater)
test_acc = evaluate_accuracy(net, test_iter)
animator.add(epoch + 1, train_metrics + (test_acc,))
train_loss, train_acc = train_metrics
assert train_loss < 0.5, train_loss
assert train_acc <= 1 and train_acc > 0.7, train_acc
assert test_acc <= 1 and test_acc > 0.7, test_acc
num_epochs = 10
train_ch3(net, train_iter, test_iter, crossEntropy, num_epochs, updater)
4.4 softmax 的简洁实现
通过softmax 函数得到每项的概率时
y
^
j
=
e
x
p
(
o
j
)
∑
k
e
x
p
(
o
k
)
\hat{y}_j=\frac{exp(o_j)}{\sum_kexp(o_k)}
y^?j?=∑k?exp(ok?)exp(oj?)?
为了避免太大的数,造成数据的上溢,将特别大的项减掉
y
^
j
=
e
x
p
(
o
j
?
m
a
x
(
o
k
)
)
∑
k
e
x
p
(
o
k
?
m
a
x
(
o
k
)
)
\hat{y}_j=\frac{exp(o_j - max(o_k))}{\sum_kexp(o_k-max(o_k))}
y^?j?=∑k?exp(ok??max(ok?))exp(oj??max(ok?))?
这样会造成某一些数会非常小,接近0,在计算交叉熵时,
y
i
l
o
g
y
^
i
y_ilog\hat{y}_i
yi?logy^?i?会出现无穷小的情况,计算交叉熵时有一个小技巧
l
o
g
(
y
^
i
)
=
o
j
?
m
a
x
(
o
k
)
?
l
o
g
(
∑
k
e
x
p
(
o
k
?
m
a
x
(
o
k
)
)
)
log(\hat{y}_i)=o_j-max(o_k)-log(\sum_kexp(o_k-max(o_k)))
log(y^?i?)=oj??max(ok?)?log(k∑?exp(ok??max(ok?)))
使用pytorch 完整的代码实现
import torch
import torchvision
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
transform = transforms.ToTensor()
train_dataset = torchvision.datasets.MNIST(root='./data',
train=True,
transform=transform,
download=True)
test_dataset = torchvision.datasets.MNIST(root='./data',
train=False,
transform=transform)
batch_size = 256
train_iter = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_iter = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
net = nn.Sequential(nn.Flatten(), nn.Linear(784, 10))
loss = nn.CrossEntropyLoss(reduction='mean')
trainer = torch.optim.SGD(net.parameters(), lr=0.03)
num_epochs = 10
for epoch in range(num_epochs):
total_loss = 0.0 # 初始化总损失为零
for x, y in train_iter:
# 前向传播
output = net(x)
l = loss(output, y)
# 反向传播
trainer.zero_grad()
l.backward()
trainer.step()
# 累加批次的损失
total_loss += l.item() # 使用 l.item() 将损失转换为 Python 数字
# 计算整个 epoch 的平均损失
average_loss = total_loss / len(train_iter)
# 打印当前轮的平均损失
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {average_loss:.4f}')
Epoch [1/10], Loss: 1.0835
Epoch [2/10], Loss: 0.6061
Epoch [3/10], Loss: 0.5108
Epoch [4/10], Loss: 0.4644
Epoch [5/10], Loss: 0.4364
Epoch [6/10], Loss: 0.4164
Epoch [7/10], Loss: 0.4017
Epoch [8/10], Loss: 0.3903
Epoch [9/10], Loss: 0.3814
Epoch [10/10], Loss: 0.3728
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 最强 Pandas 平替工具库:Polars
- day41 动态规划(3)
- 关于pytorch中的dim的理解
- 批量记账,一键打印,轻松管理你的财务人生
- 机器学习-模型评估优化
- CANoe ETH以太网配置
- python&Django&mysql校园宿舍管理系统07558-计算机毕业设计项目选题推荐(附源码)
- conda命令克隆(复制)环境
- 【MIS_231228】使用ARMA预测疫情后某医药股的股价
- javaScript中的常用事件