创建工作空间及小乌龟运动
创建ros源码包前先创建一个工作空间,使用ubuntu的命令mkdir创建一个目录:每一个工作空间tmp_ws中都有一个src目录
mkdir -p tmp_ws/src
然后,切换到创建的ros的工作空间中去
cd tmp_ws/src通过catkin_create_pkg方式创建包:catkin_create_pkg + 包名字(自己定义) + 依赖项(用python语言:rospy) + 通信消息(控制小乌龟运动)
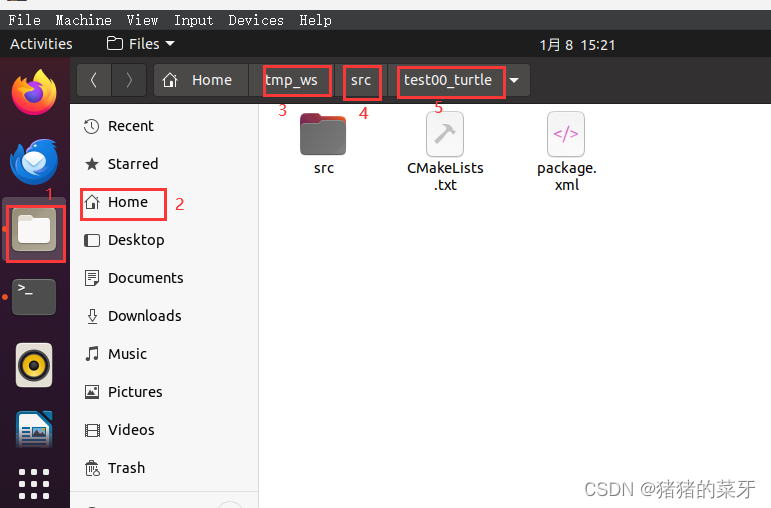
catkin_create_pkg test00_turtle rospy geometry_msgs
?可以在Home中看一下刚创建的工作空间
?虽然创建了rospackage,但里面什么也没有,可以通过如下命令修改一下bashrc
gedit .bashrc运行进入bashrc,在bashrc中加入一行,让系统找到ros的工作目录:
source ~/tmp_ws/devel/setup.bash根据自己创建的工作空间名(我这里是tmp_ws)进行添加,如下
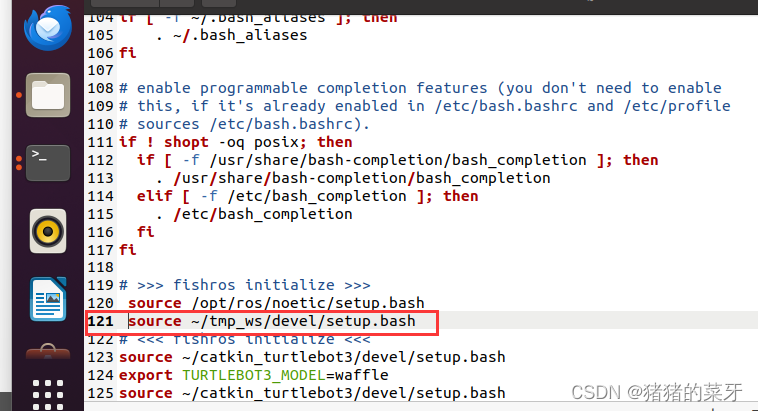
改后记得右上角保存"Save"
此时还没有编译我们的工作空间,所以tmp_ws中只有src文件
进入工作空间tmp_ws,编译一下:
cd tmp_ws/
catkin_make能把所有的源码和工作空间编译一下
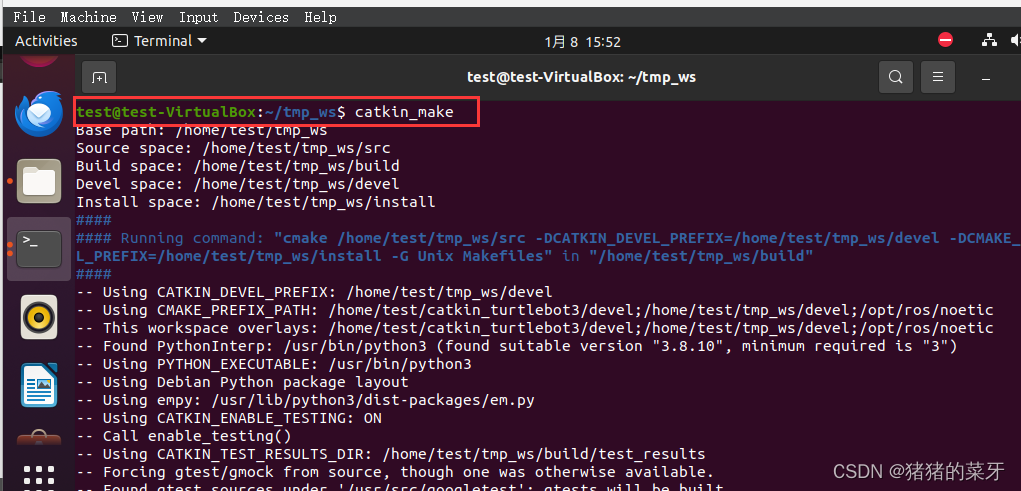
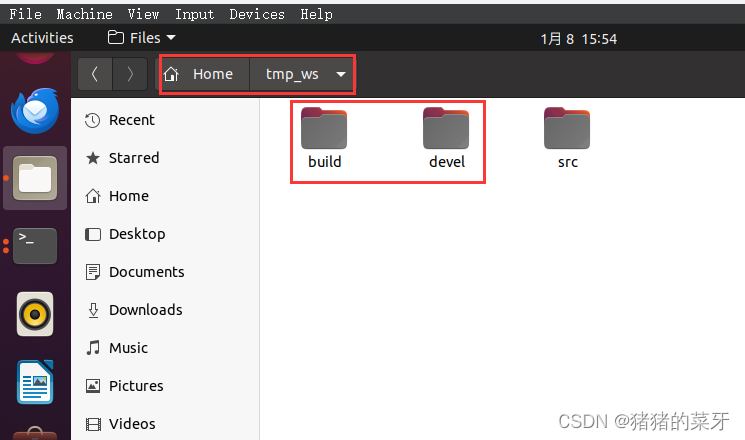
在编译的过程中,tmp_ws中生成了两个文件:build 、devel
下面通过写一个节点看一下程序是如何运行的
输入roscore,所有的其他节点都要向roscore做注册、汇报
roscore
开一个新界面,接下来运行一个经典的turtlesim的例子?
1、安装turtlesim的软件包
sudo apt install ros-noetic-turtlesim其他的包也能通过这种方式安装,ros+版本号+包名
2、启动软件包中的节点
通过rosrun命令启动软件包中的节点(一个小乌龟):rosrun+包名+所调用的包内函数名
rosrun turtlesim turtlesim_node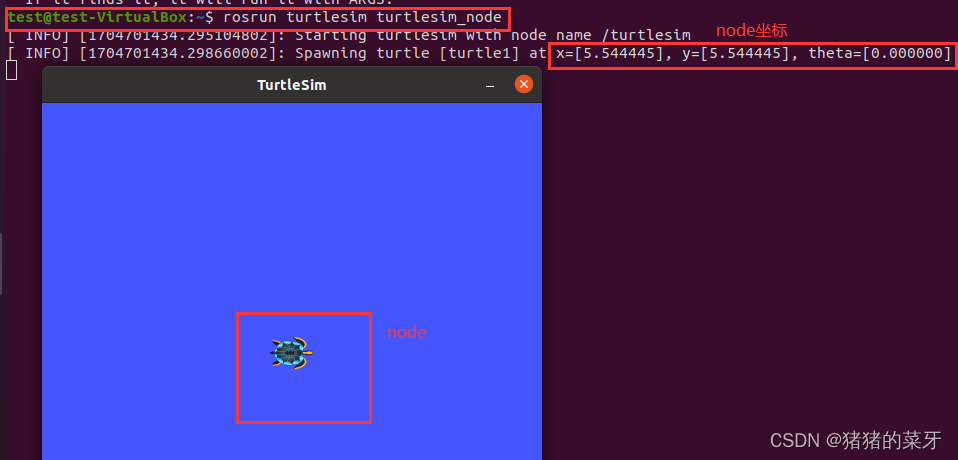
3、通过rostopic list详细了解小乌龟
rostopic list
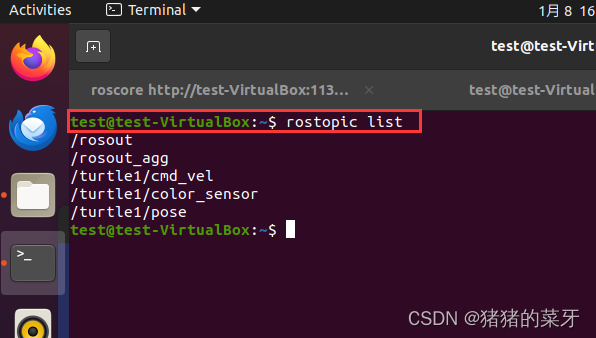
可通过rostopic info +小乌龟属性名(如rostopic info /turtle1/pose)看一下小乌龟的详细属性数据
最后,写一段代码程序实现控制小乌龟的运动
1、切换到软件包中
cd tmp_ws/src/test00_turtle/scripts/
通过touch命令创建一个test00.py的文件,可通过vim或记事本编写代码程序,这里我使用vim
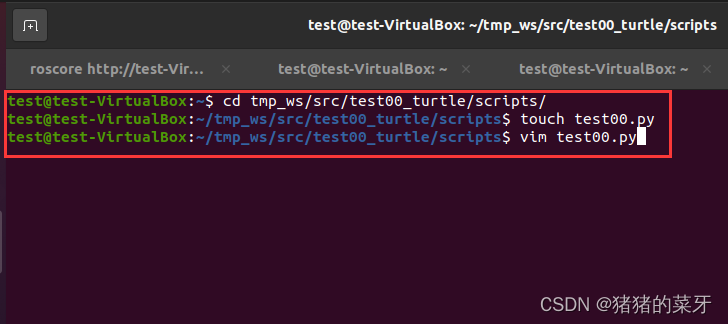
2、进入编写代码程序
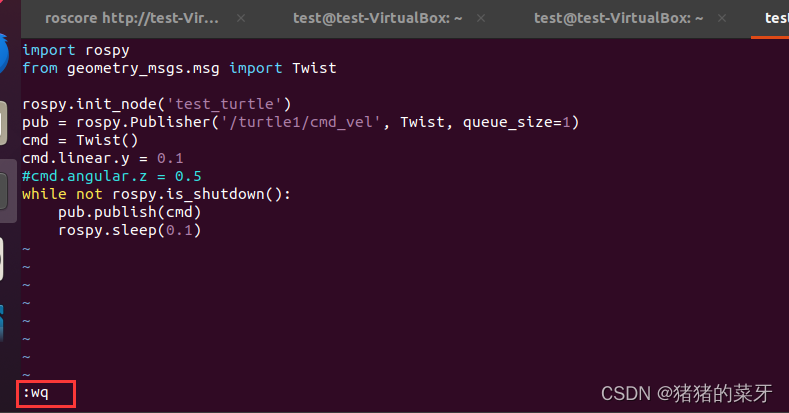
import rospy
from geometry_msgs.msg import Twist
rospy.init_node('test_turtle')
pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=1)
cmd = Twist()
cmd.linear.y = 0.1
#cmd.angular.z = 0.5
while not rospy.is_shutdown():
pub.publish(cmd)
rospy.sleep(0.1)3、保存并退出
先按esc键,然后键入冒号:(会在左下角显示),最后在冒号后面输入wq(意思是保存并退出),按回车键即可
4、运行程序
如果输入python运行报错,如下
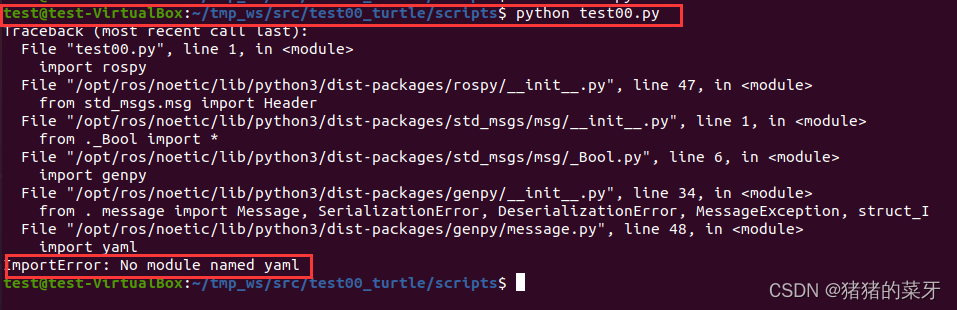
可以试试输入python3

可以发现小乌龟沿着y轴运动
也可以通过rosrun运行,但它要求test00.py有可执行权限
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- LaWGPT安装和使用教程的复现版本【细节满满】
- django后台进行加密手机号字段,加密存储,解密显示
- 深入理解C语言中的return关键字与函数返回机制
- 单主机双屏幕实现跨屏幕信息交互的GUI程序
- 少儿编程究竟应该以应试升学为主,还是以兴趣为导向呢?
- 隐藏<el-dialog>组件的右上角关闭按钮
- R语言【paleobioDB】——pbdb_ref_collections():根据输入的采集号信息返回参考文献的信息
- GaussDB(DWS)查询优化技术大揭秘
- 安装 anaconda2023.9 后发现 conda activate
- 抖店入驻资质是什么?