ROS第 9 课 编写简单的服务端 Server
发布时间:2024年01月19日
第 9 课 编写简单的服务端 Server
1.创建服务器代码
注意:在创建服务器代码之前,需要先创建工作空间和功能包,具体操作过程可前往目录“第4课 创建工作空间与功能包”查看文档。
- 输入指令“cd catkin_ws/src/beginner_hiwonder/scripts/”,回车。

- 输入指令“vi turtle_command_server.py”编辑程序,复制下面程序。如需修改,再按下“i”即可修改。修改完成,按下“Esc”,输入“:wq”保存并退出。

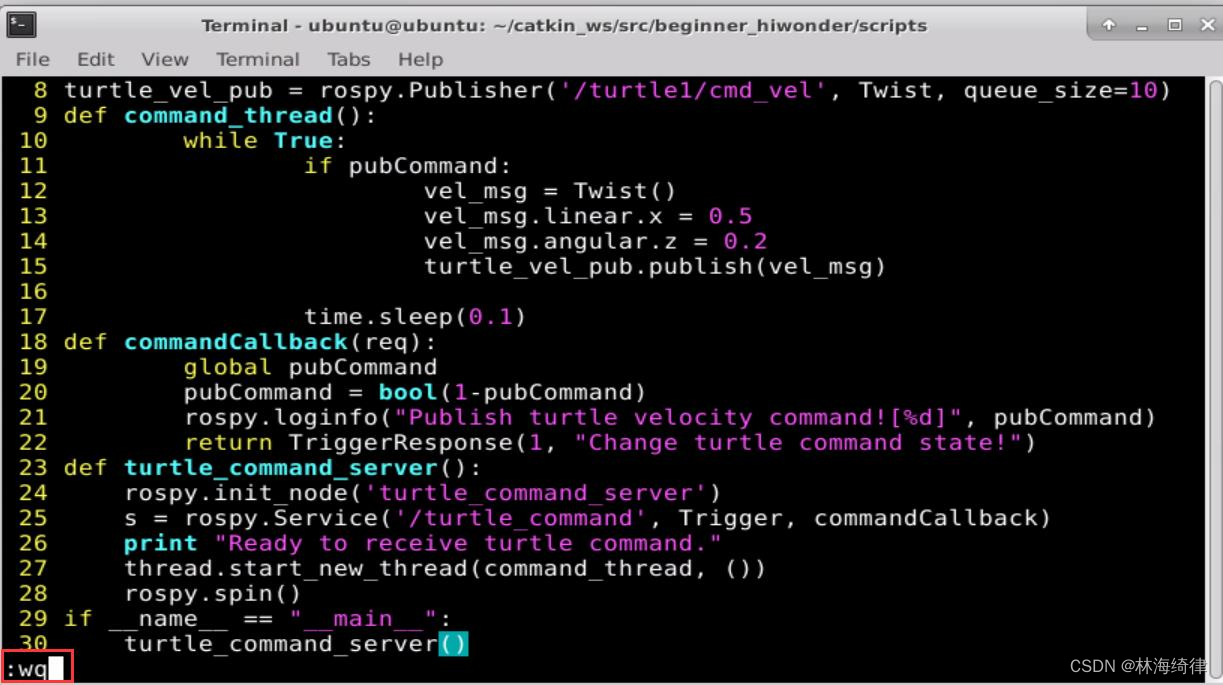
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 导入ROS的python接口模块
import rospy
# 导入thread模块用于创建新线程,time模块用于休眠
import thread, time
# 从geometry_msgs.msg导入Twist消息类型,该消息定义了线性和角速度
from geometry_msgs.msg import Twist
# 从std_srvs.srv导入Trigger服务类型,该服务用于简单的触发请求
from std_srvs.srv import Trigger, TriggerResponse
# 初始化全局变量pubCommand,用于确定是否发布速度命令
pubCommand = False;
# 定义一个Publisher,发布消息到'/turtle1/cmd_vel'话题,消息类型为Twist,队列长度为10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
# 定义一个线程函数,用于连续发布速度命令
def command_thread():
while True: # 持续运行
if pubCommand: # 如果pubCommand为True,则发布速度命令
vel_msg = Twist() # 创建Twist类型的消息
# 设置线速度为0.5m/s,角速度为0.2rad/s
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 使用Publisher发布速度命令
turtle_vel_pub.publish(vel_msg)
time.sleep(0.1) # 每次循环等待0.1秒
# 定义服务的回调函数,当有服务请求时调用
def commandCallback(req):
global pubCommand # 使用全局变量pubCommand
pubCommand = bool(1-pubCommand) # 切换pubCommand的值
# 在ROS日志中记录信息
rospy.loginfo("Publish turtle velocity command![%d]", pubCommand)
# 返回服务响应
return TriggerResponse(1, "Change turtle command state!")
# 定义一个函数用于设置ROS节点和服务
def turtle_command_server():
rospy.init_node('turtle_command_server') # 初始化ROS节点,名称为'turtle_command_server'
# 创建一个服务'/turtle_command',服务类型为Trigger,服务请求时调用commandCallback
s = rospy.Service('/turtle_command', Trigger, commandCallback)
print "Ready to receive turtle command."
# 创建一个新线程运行command_thread函数
thread.start_new_thread(command_thread, ())
# spin()保持python脚本不会退出,直到节点被显式关闭
rospy.spin()
# 当脚本被执行时
if __name__ == "__main__":
turtle_command_server() # 调用turtle_command_server函数
3) 输入指令“chmod +x turtle_command_server.py”,并按下回车,为保存的turtle_command_server.py赋予可执行权限。

2.运行服务器节点
- 输入指令“roscore”,启动节点管理器。

若已开启,则会出现以下提示:

- 输入指令“rosrun turtlesim turtlesim_node”,并按下回车,启动小乌龟仿真器。

- 打 开 一 个 新 的 命 令 行 终 端 , 输 入 指 令 “ rosrun beginner_hiwonder turtle_command_server.py”,并按下回车,运行服务器节点。如需停止节点的运行,可按下快捷键“Ctrl+C”。

- 再次打开一个新的命令行终端,输入指令“rosservice call /turtle_command “{}””,并按下回车,令小乌龟沿着圆形轨迹移动。


文章来源:https://blog.csdn.net/m0_73841621/article/details/135681760
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Docker守护进程是什么
- The ultimate BMW scan tool on the market!
- SaaS新商路:创新驱动未来
- elastic之部署elasticsearh
- 黑马头条--day02.文章列表查看
- 【sqlite3】sqlite3在linux下使用sqlitebrowser工具实现数据可视化
- 基于51系列单片机设计的简易电子琴 程序电路原理图
- 司铭宇老师:家具导购销售培训:家具导购员销售技巧和话术
- docker镜像、容器管理与迁移
- 内存函数的学习