Contextcapture(iTwin capture)倾斜建模教程
发布时间:2024年01月03日
Contextcapture(iTwin capture)倾斜建模教程
前言
基于小型无人机的倾斜建模是现在测绘技术发展的一个里程碑,极大地提高了测绘工作的效率。
无人机航片倾斜建模的目的是将无人机拍摄的图片制作成实景三维模型,以供测绘、展览等用途。
步骤
1.1 准备数据
准备好可见光航片,本次数据使用大疆M300 RTK+P1镜头扫拍模式拍摄
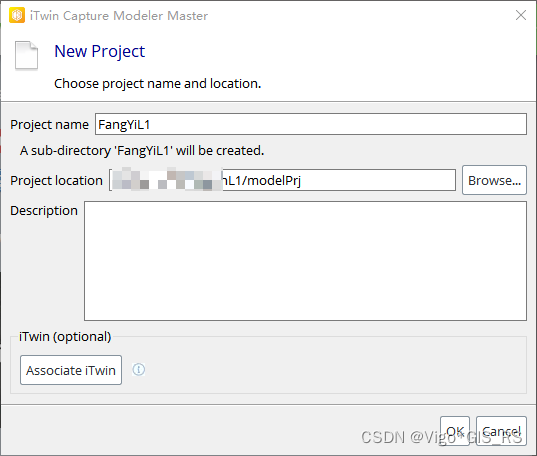
1.2 新建项目
在iTwin Cpature Modeler Mater中新建项目,设置好项目路径
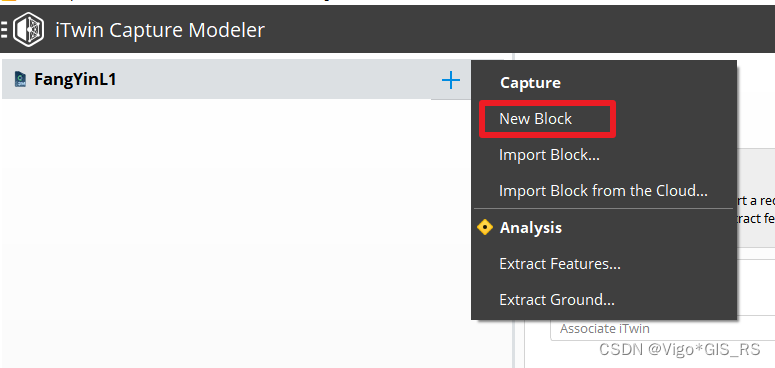
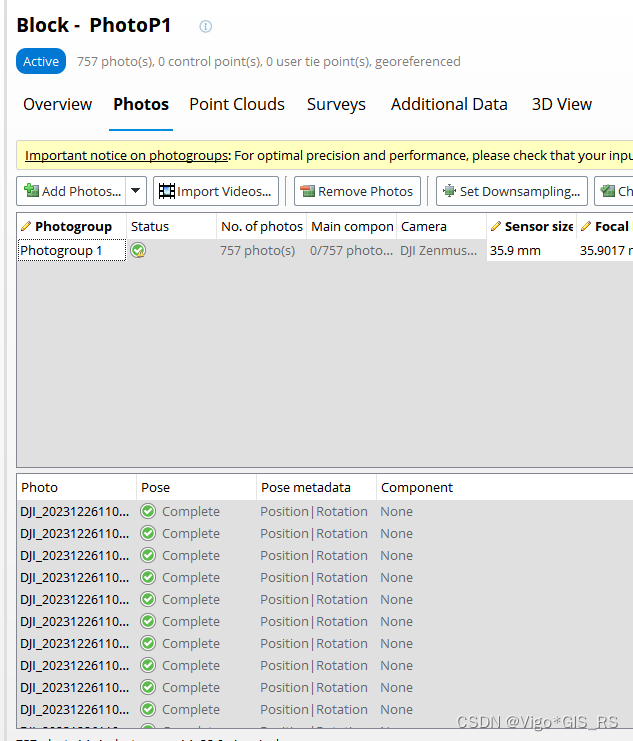
1.3 新建Block
Block指的是工作项目中的区块,每个Block都可以存储航片并建模,一个项目可以有多个Block。
- 点击New Block
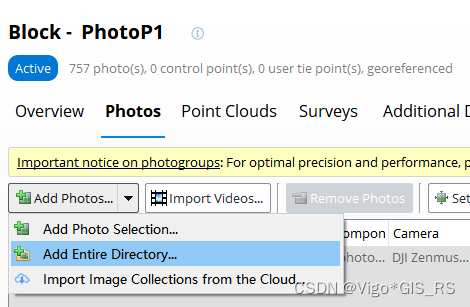
- 修改Block的名称,添加航片路径(文件夹)
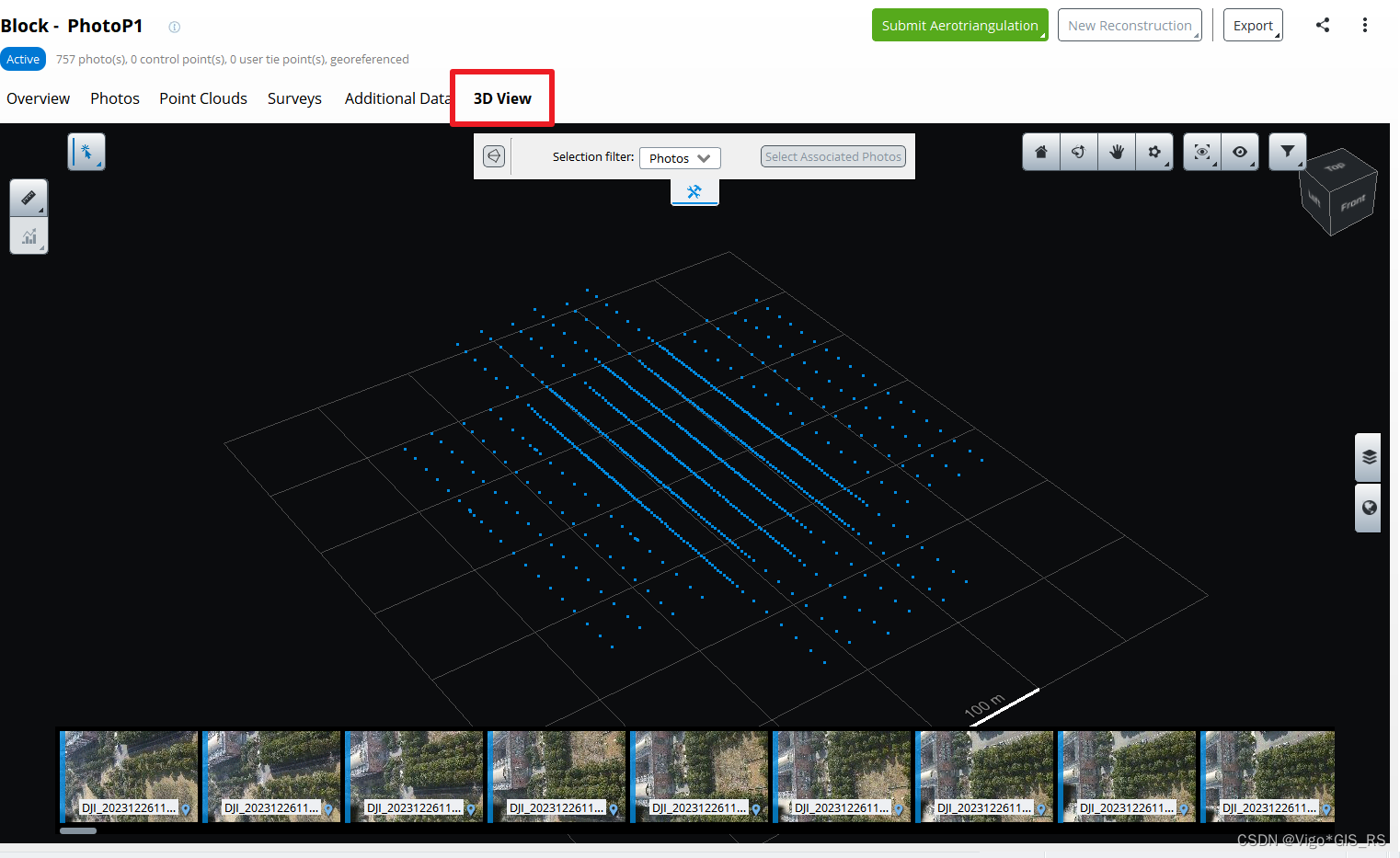
- 点击3D View 查看相片位置
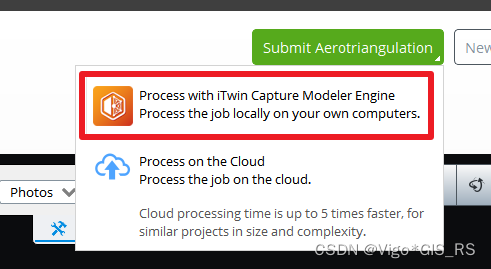
1.4 空三 Submit Aerotriangulation
- 点击Submit Aerotriangulation,选择使用iTwin capture modeler engine本地处理
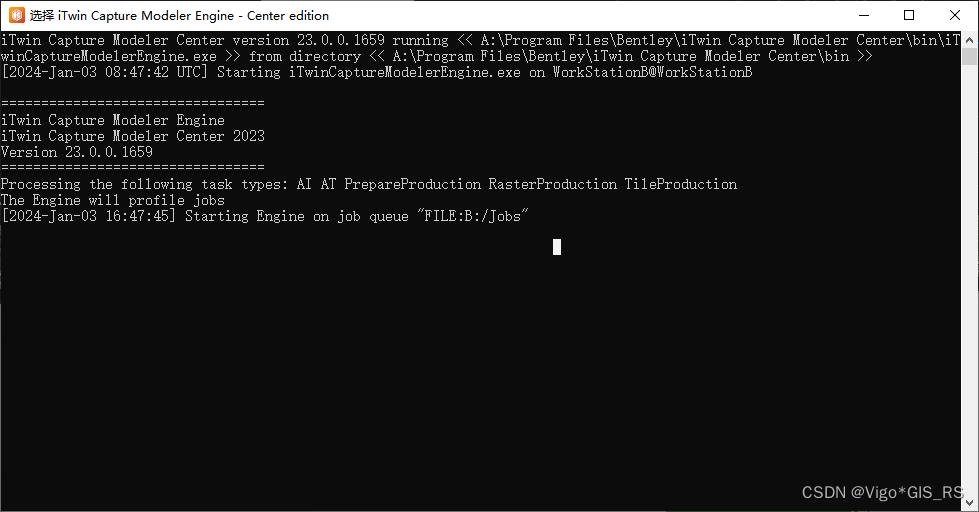
点击之后,手动打开iTwin capture modeler engine
注意:iTwin capture modeler master和iTwin capture modeler enginee是两个软件
1.5 查看空三结果
空三完成之后,得到了稀疏点云,
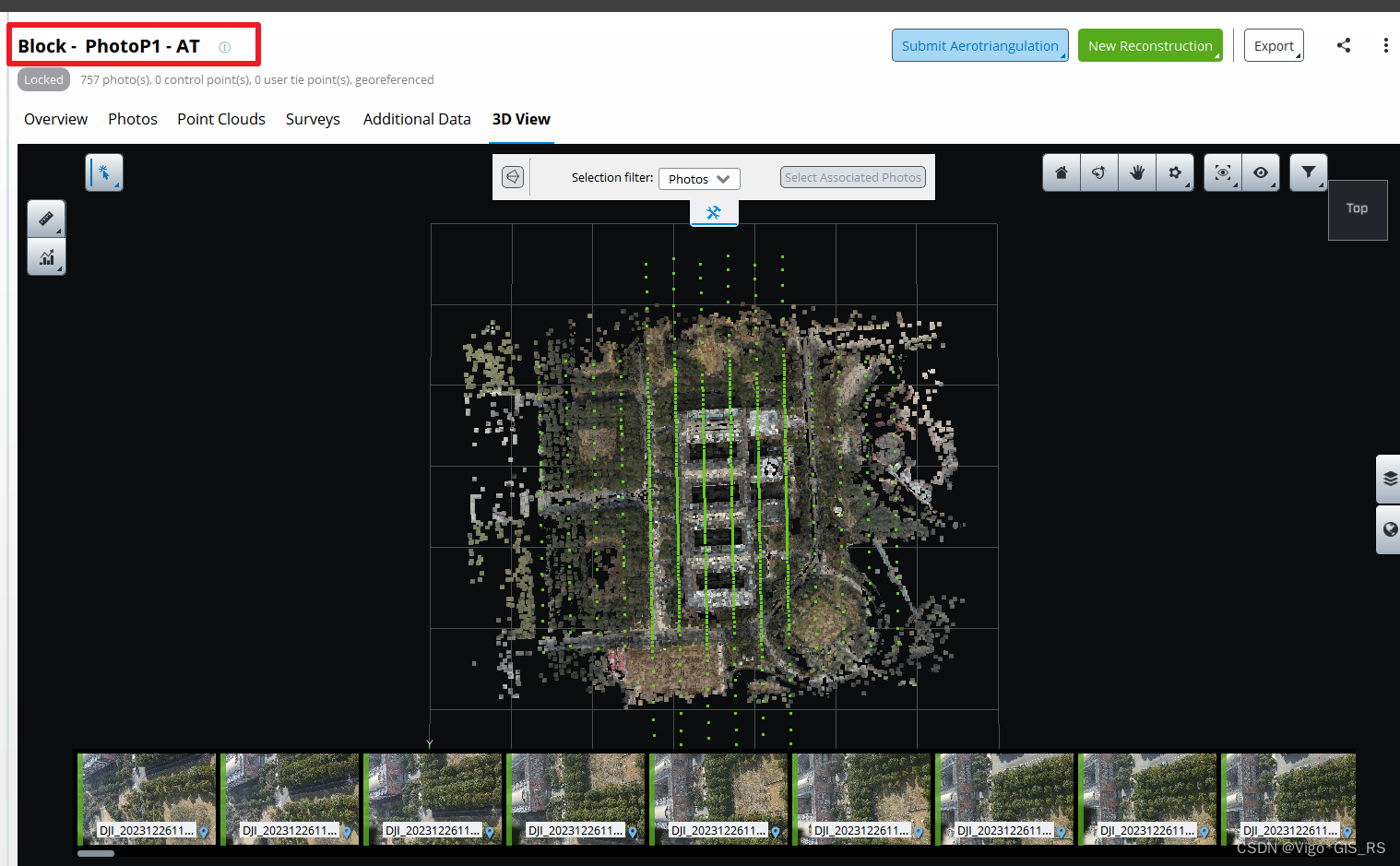
- 检查是否有缺失或者错乱的重叠,如果有,需要编辑空三,如果没有就下一步
1.6 提交三维重建
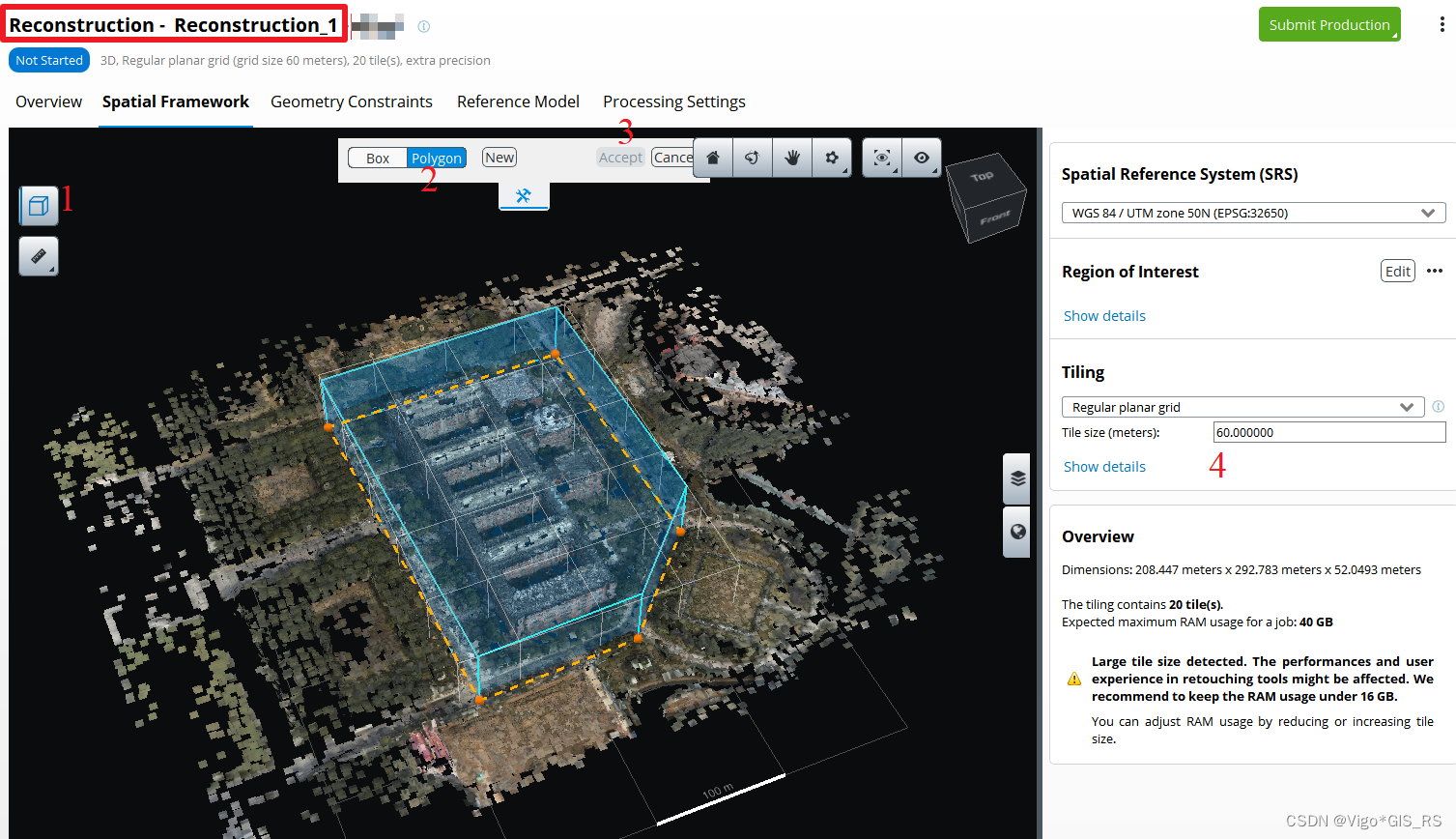
1.6.1 编辑重建(Reconstruction)的空间框架(spatial framework)
- 打开Reconstruction,点击spatial framework标签。
- 首先点击左上角的立方体,点击中间的polygon,修改建模区域的边界(如图中橙色虚线所示),编辑完成之后点击accept,应用边界。
- 根据电脑的运行内存,设置tile的大小,设置完成后,会自动计算tile所需的最大运行内存。如果电脑的运行内存为64G,在这里最大的预估使用内存可以设置为50G。
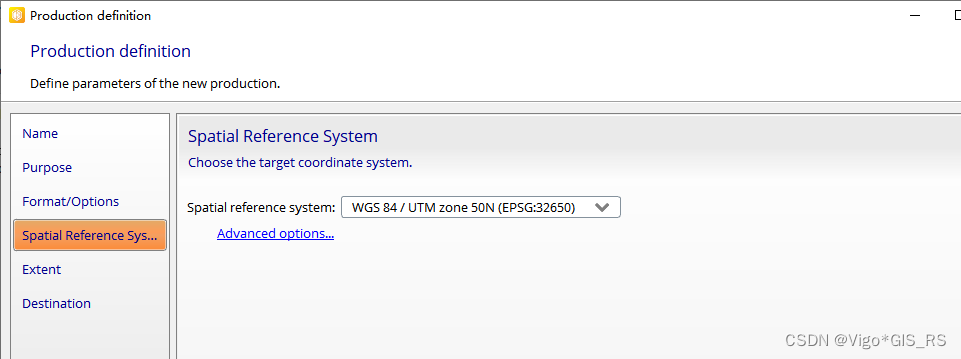
- 选择空间参考系统,这里尽量选择投影坐标。
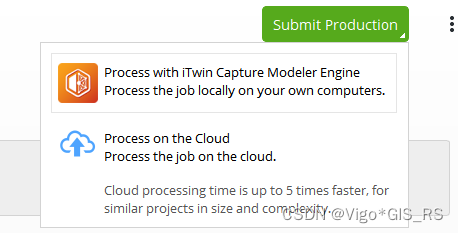
1.6.2 提交三维重建任务
- 点击Submit Production,选择iTwin capture modeler engine
- 输入模型名称
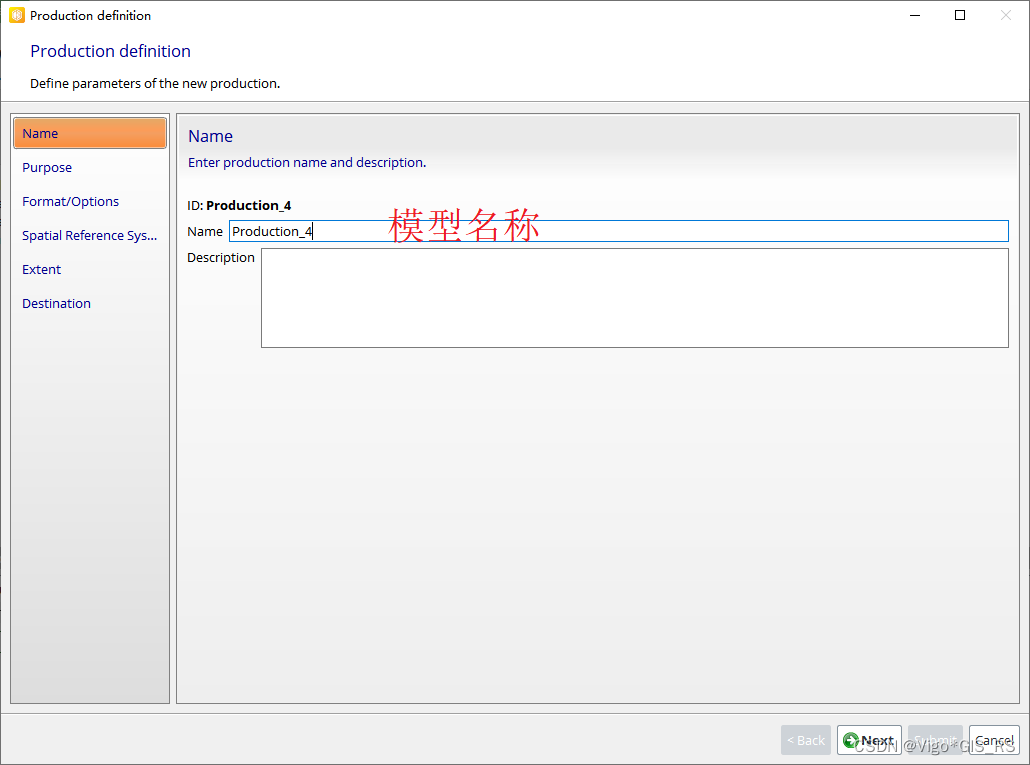
- 选择输出结果,在这里我们选择Export 3D mesh
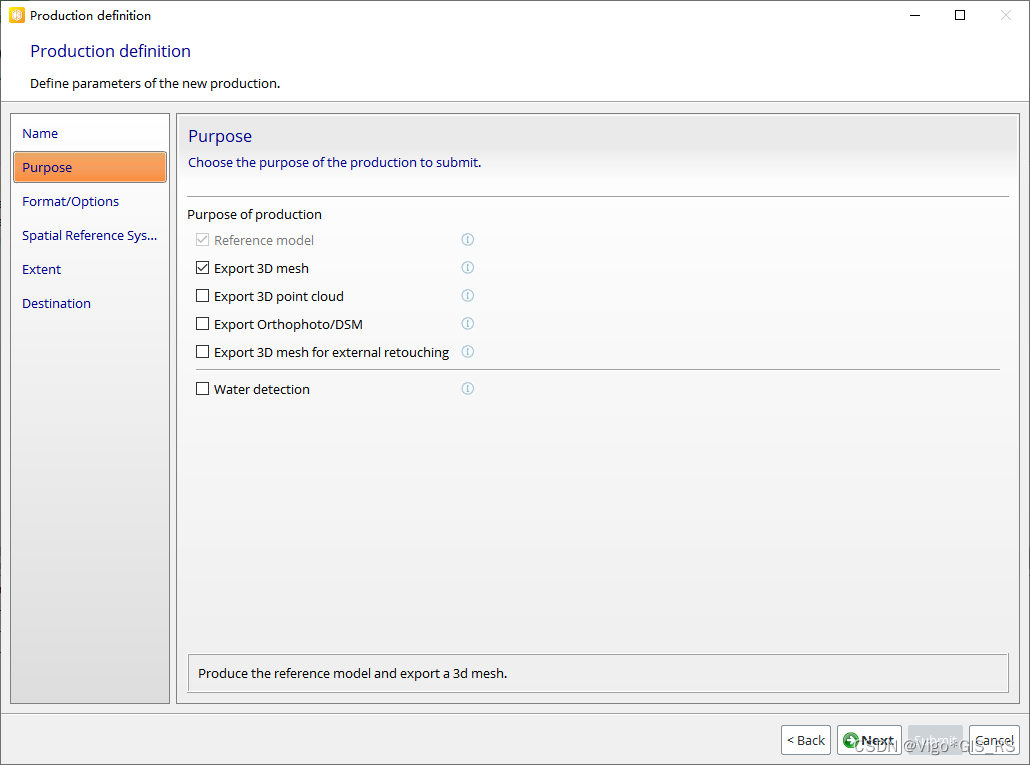
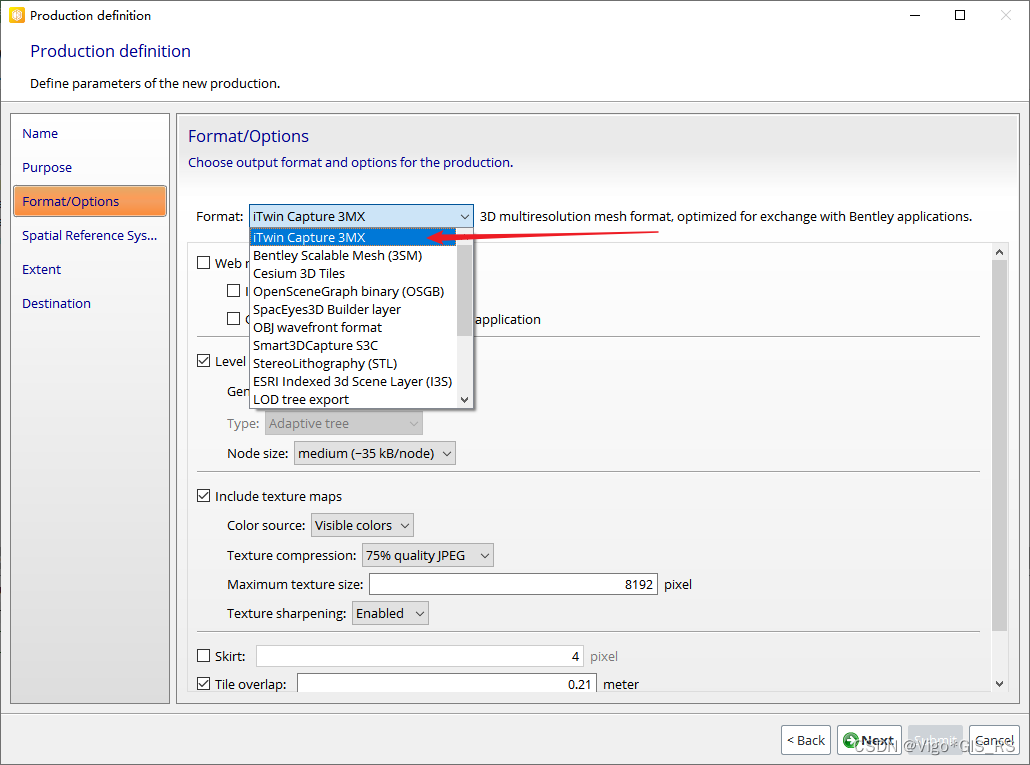
- 选择模型格式
这里我建议大家先选择3MX,这个格式的模型做完之后可以直接在本软件中打开,这样就可以看到模型的效果,如果有不满意的地方,可以在Reference model里面进行删改。
- 设置坐标
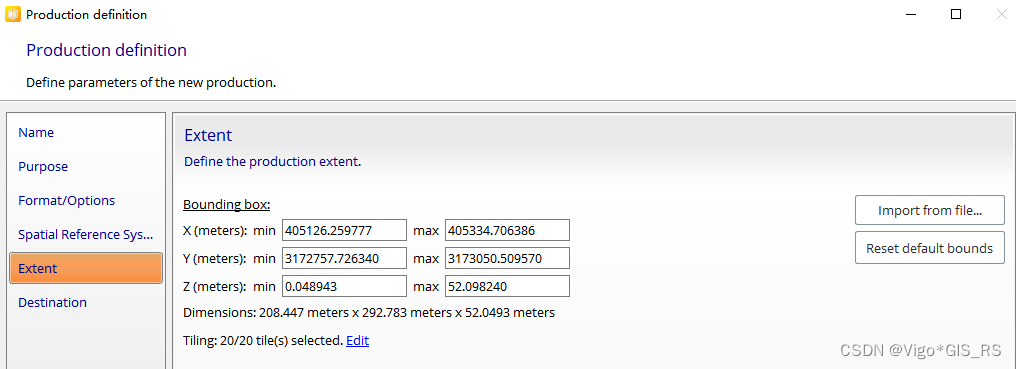
- 检查并设置模型输出范围
一般来说,这一步不需要设置
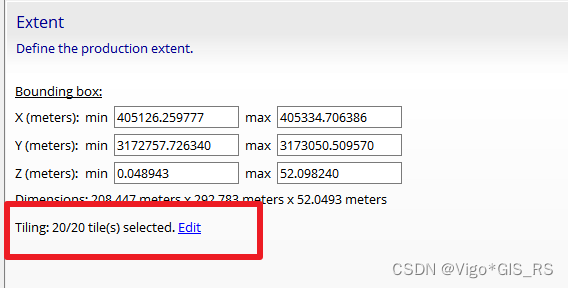
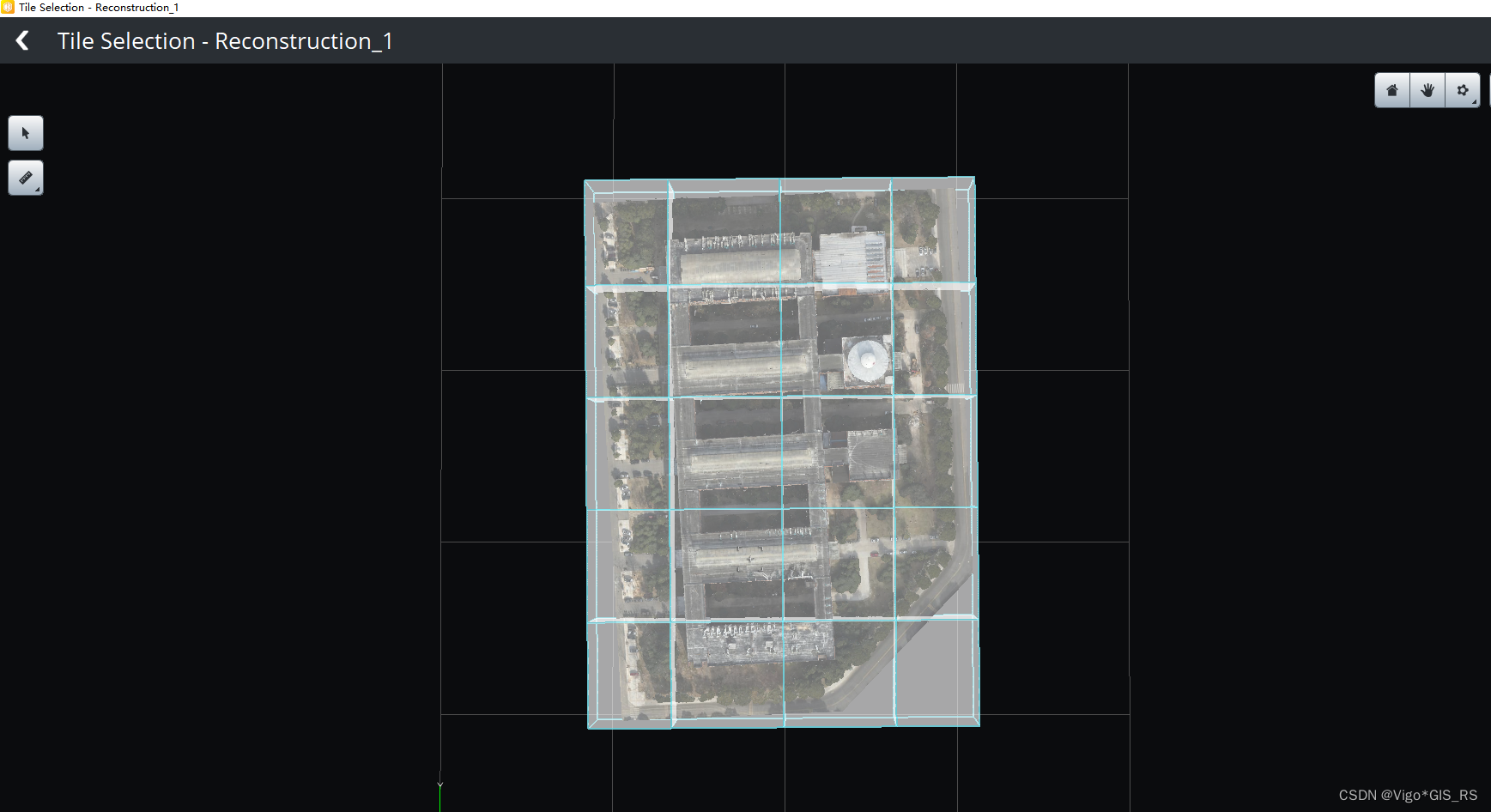
如果想快速检查模型的质量,可以在edit里面选中某几个tile提交production
7. 设置输出目录
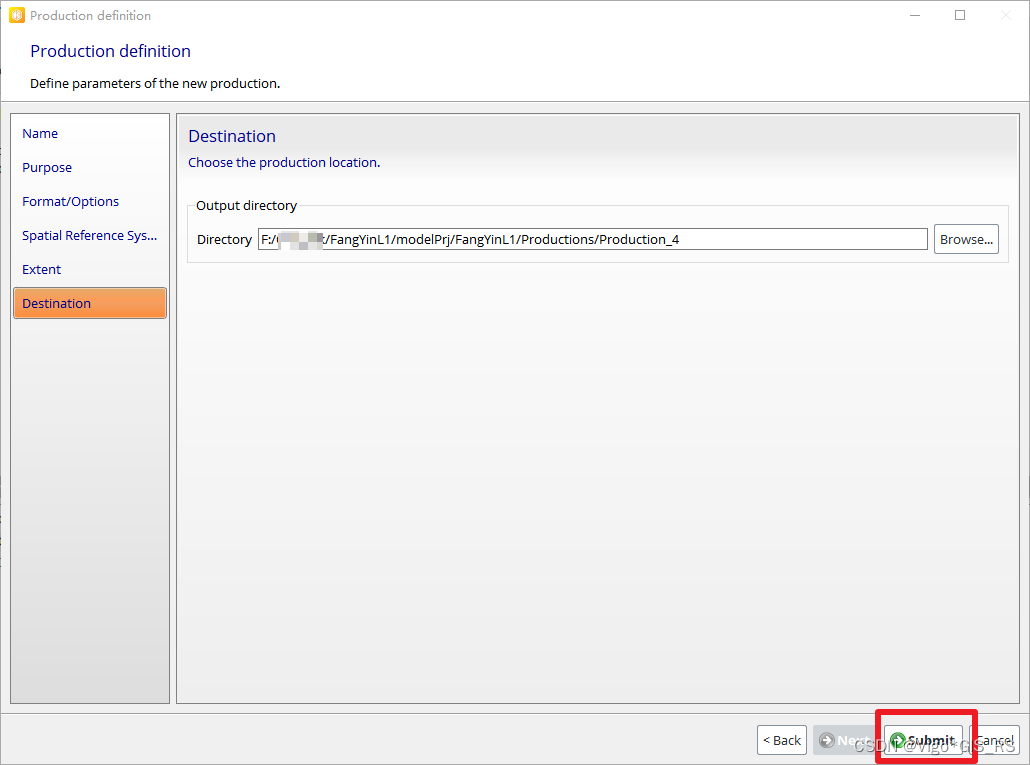
完成设置之后点击提交即可
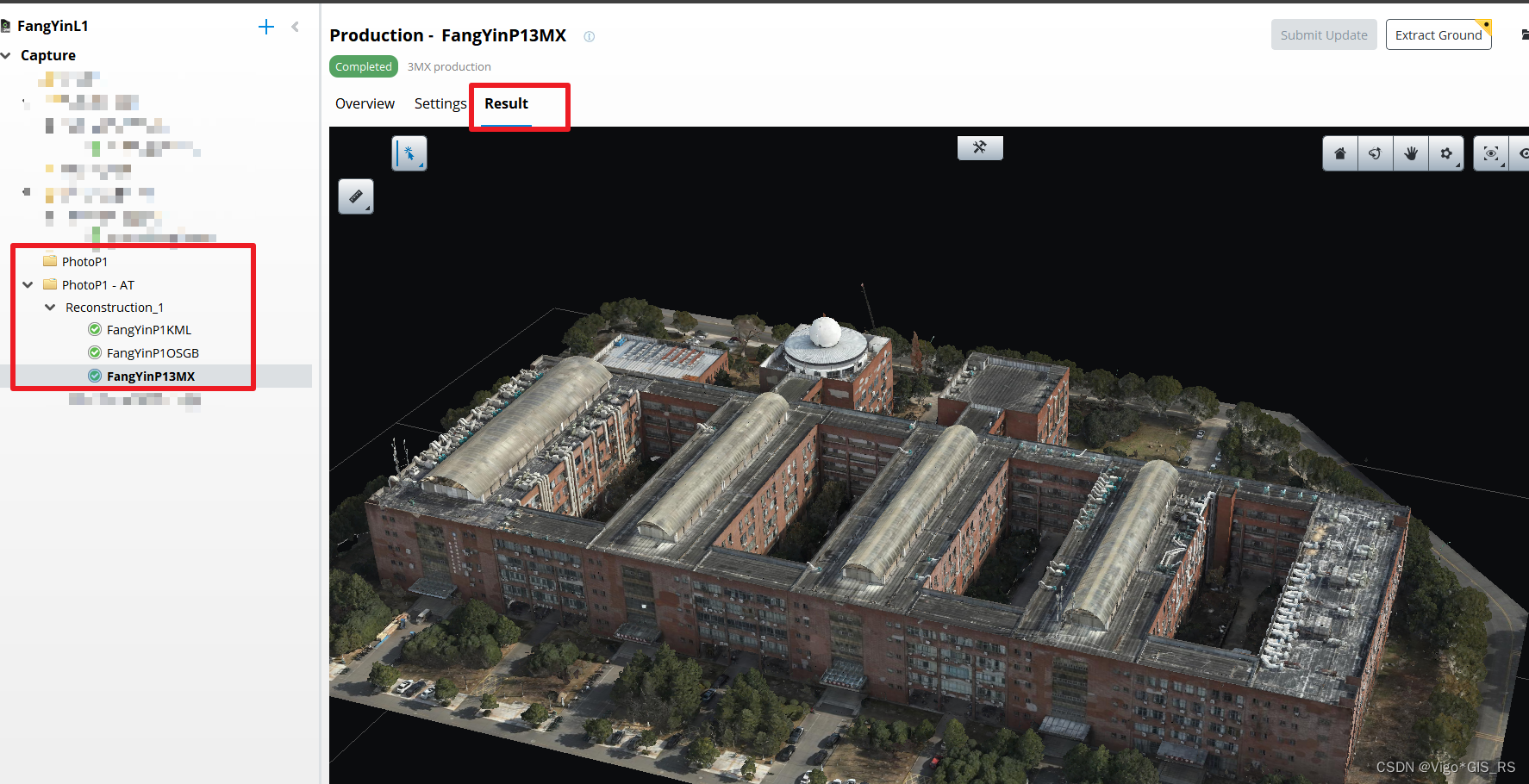
1.7 查看三维模型
在3MX格式模型的Result中查看建模结果
后记
iTwin Capture是无人机航片倾斜建模领域中非常重要的软件,本文简介了使用无人机航片建模的流程。有关iTwin Capture的使用细节和技巧还要很多,如:
- 查看并分析精度报告
- 使用水面约束
- 修模再导入
- 变更数据路径
- 使用像控点
- 局域网联机建模
- 涉密处理,自定义偏移量
- 使用点云
- 磁盘清理等
以后有机会再和大家分享这些技术。
感谢阅读!
文章来源:https://blog.csdn.net/qq_41159191/article/details/135207265
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!