【深蓝学院】手写VIO第11章--Square Root Bundle Adjustment
文章目录
1. 文章贡献
这篇文章最大的贡献在于证明了对
J
l
Jl
Jl进行QR分解,对normal equation左乘
Q
T
Q^T
QT等价于Schur compliment,即证明了(14)(16)是等价的。如此则无需makeHessian,可以使用float代替double,加快BA求解速度。
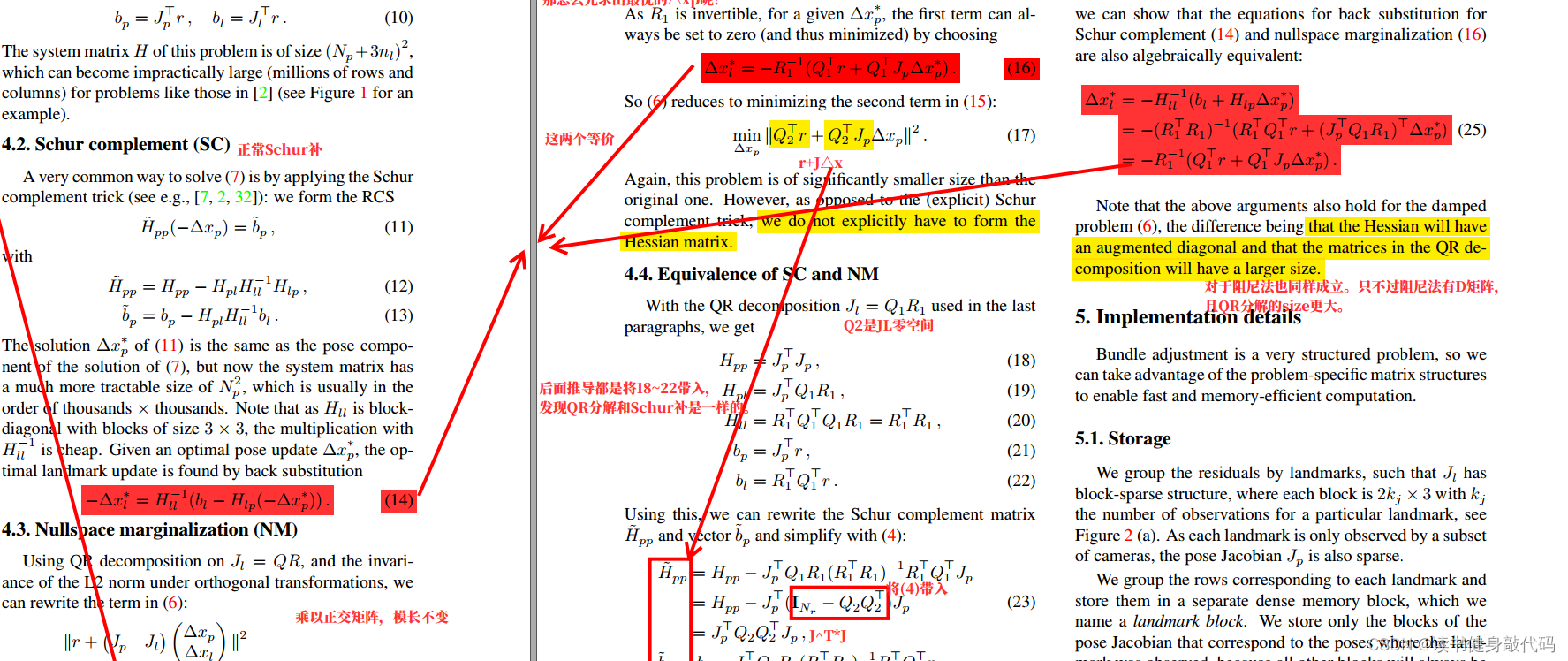
左乘 Q T Q^T QT能够使得问题转化为Schur补相同的问题,因为如果 Δ x p ? \Delta x_p^* Δxp??固定,则一定能找到 Δ x l ? \Delta x_l^* Δxl??使得第一项为0,所以可直接优化第二项得出 Δ x P ? \Delta x_P^* ΔxP??(与Schur compliment marg掉landmark效果相同),即式(17),本文使用CG迭代求解 Δ x p ? \Delta x_p^* Δxp??。
2. 在Jacobian中添加 d a m p \sqrt{damp} damp?等价于在Hessian中添加damp
这里的理解参照Ceres源码中的注释,在Jacobian和Hessian中添加阻尼因子方法有所区别,但效果相同,下面会给予证明。
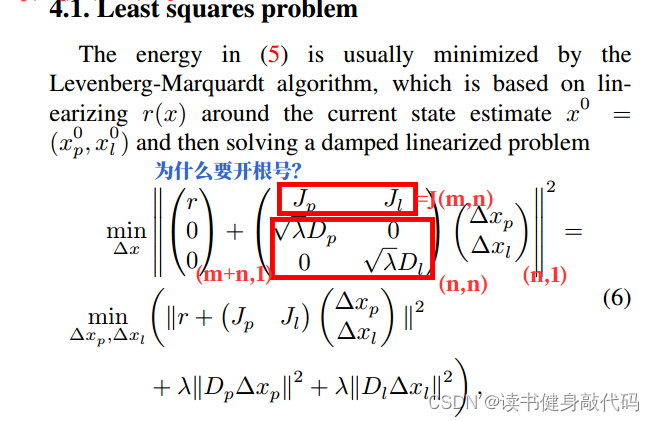
参照这种方法来理解式(6),其实加入的阻尼因子是在Jacobian的行最后加的,
∣
∣
A
x
?
b
∣
∣
2
和
||Ax-b||^2和
∣∣Ax?b∣∣2和||Dx||^2$优化的并不是同一个x,但是,如下所示:
简单证明,设Jacobian为
[
a
,
b
,
c
]
\begin{bmatrix} a,b,c \end{bmatrix}
[a,b,c?]
设
a
,
b
a,b
a,b分别为camera pose,
c
c
c为landmark,为了简化,我们将
a
,
b
,
c
a,b,c
a,b,c均看做标量。
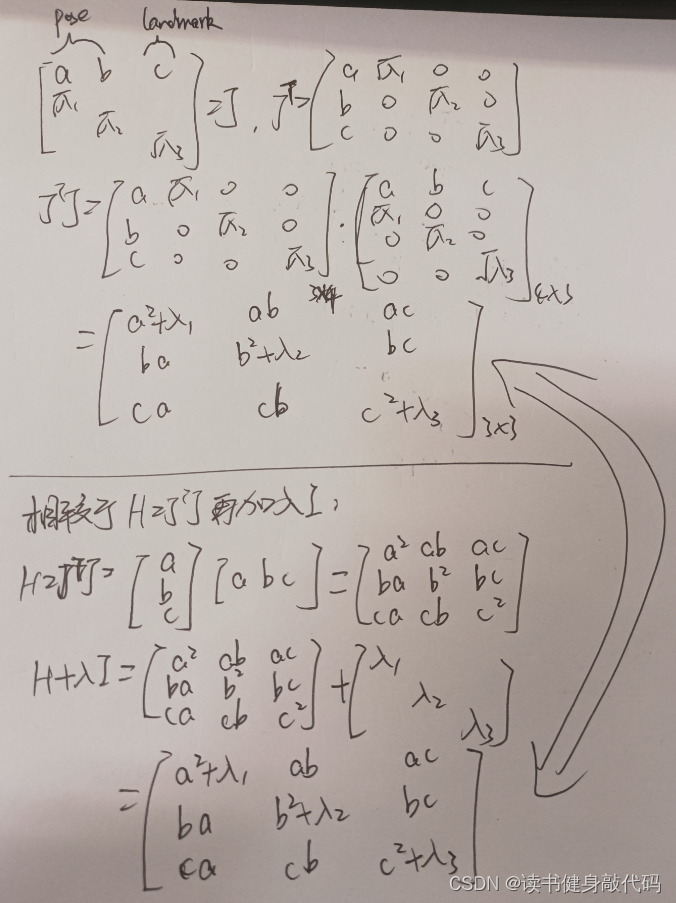
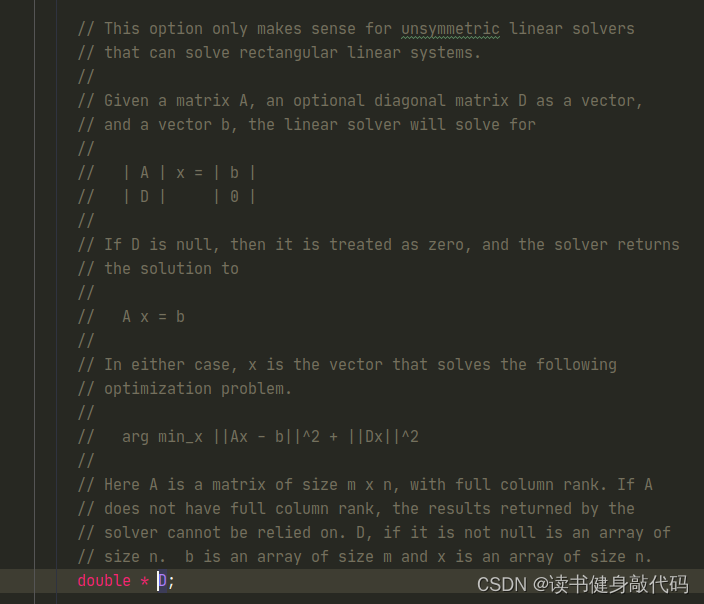
从上图可以看出,在Jacobian矩阵和Hessian矩阵中添加阻尼因子的方法是不同的,但是效果是等价的。之前在VINS-MONO拓展1中我们直接对Hessian进行操作,直接将与Hessian相同维度的对角阵 λ I \lambda I λI 叠加到Hessian上去,但是对于Jacobian,是按照上图所示的方法按行叠加在Jacobian最下测,这也解释了Ceres中为什么构建D矩阵时为什么要开根号,因为Ceres内部是直接对Jacobian进行叠加,而非Hessian:
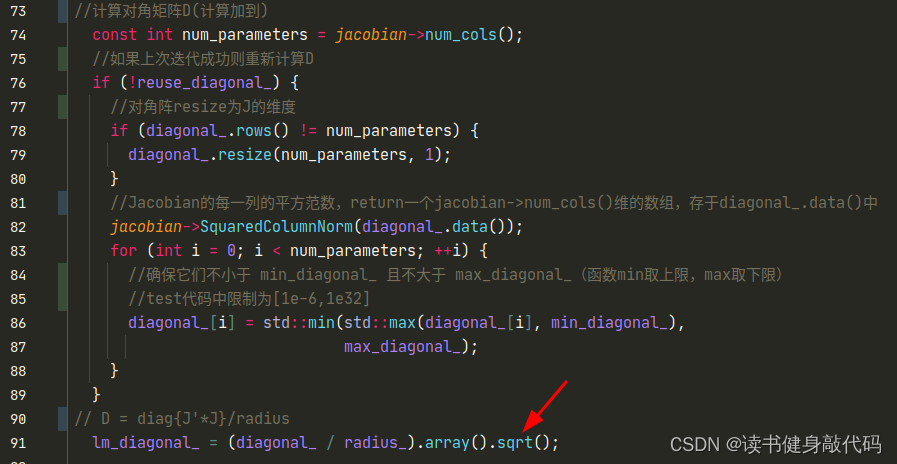
λ \lambda λ是以开根号的形式加入的,且和Jacobian有关,这样能在VIO这种情形避免加入的lambda过大(IMU数据过大,1e6级别)。
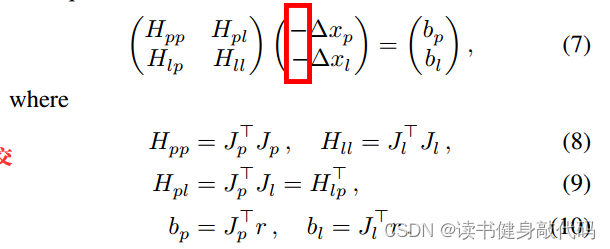
从式(7)可以看出论文作者应该是参考了Ceres的源码的,ceres中y即为 ? Δ x -\Delta x ?Δx。
2. Givens旋转
矩阵的QR分解方法有:householder,Givens rotation等。
之前在对初始
J
l
J_l
Jl?进行QR分解时使用了householder方法,但是速度较慢,Givens旋转较快,原理是通过初等行变换(又叫做Givens rotation吉文斯旋转),我们之前学习线性代数肯定接触到过这类操作。QR分解的Givens旋转目的是将
J
l
J_l
Jl?化为上三角矩阵
R
R
R,而构建的
Q
λ
Q_{\lambda}
Qλ?即为
J
L
J_L
JL?分解后的
Q
Q
Q,当
Q
λ
Q_{\lambda}
Qλ?构建完成之后,QR分解也就完成了。
关于Givens矩阵的原理以及如何构建,可以参考这篇知乎
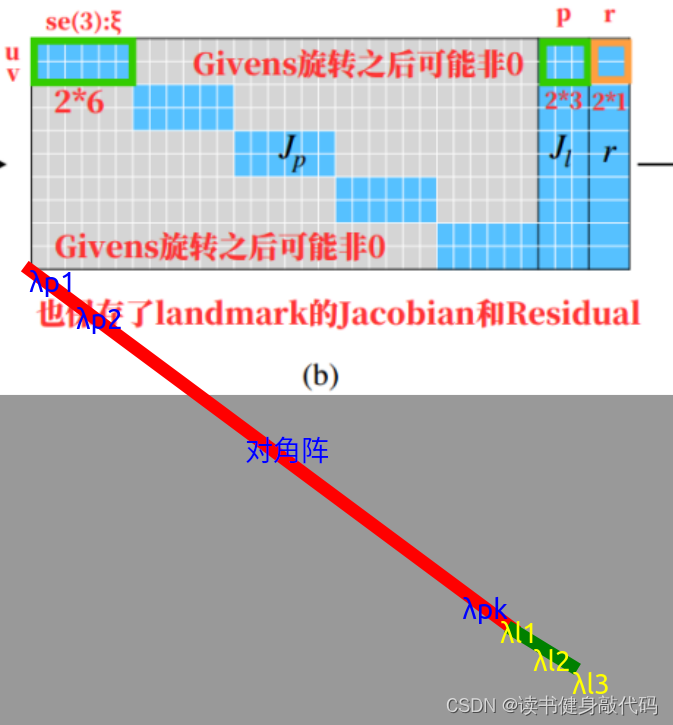
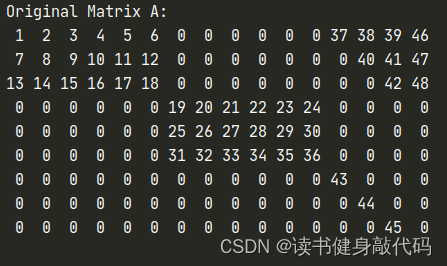
根据论文中的Dense landmark blocks,我构建了如下所示的A矩阵(这里没有考虑外参
T
b
c
Tbc
Tbc和fix camera pose[0],[1]的情况,2*6即为camera pose的Jacobian block,43,44,45block是添加的landmark damp),构建了
Q
λ
Q_{\lambda}
Qλ?,完成了A矩阵的rollback
实验代码:
#include <iostream>
#include <Eigen/Core>
#include "../include/utility.hpp"
using Scalar = float;
#define Q_LAMBDA //是否构建Q_labmda来执行回退
void small_test() {
Eigen::Matrix<Scalar, 3, 2> A;
A << 1.0, 2.0, 3.0, 4.0, 5.0, 6.0;
std::cout << "Original Matrix A:\n" << A << "\n\n";
// 构造 Givens 旋转矩阵
Eigen::JacobiRotation<Scalar> gr;
gr.makeGivens(A(0,0), A(2,0));
A.applyOnTheLeft(0, 2, gr.adjoint());
std::cout << "Matrix A after G1:\n" << A << "\n";
A(2, 0) = 0;
gr.makeGivens(A(0,0), A(1,0));
A.applyOnTheLeft(0, 1, gr.adjoint());
std::cout << "Matrix A after G2:\n" << A << "\n";
A(1, 0) = 0;
gr.makeGivens(A(1,1), A(2,1));
A.applyOnTheLeft(1, 2, gr.adjoint());
std::cout << "Matrix A after G3:\n" << A << "\n";
A(2, 1) = 0;
std::cout << "Matrix A after Givens rotation:\n" << A << "\n";
}
void big_test() {
Eigen::Matrix<Scalar, 9, 16> A;
A << 1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 0, 0, 0, 0, 0, 0, 37, 38, 39, 46,
7, 8, 9, 10, 11, 12, 0, 0, 0, 0, 0, 0, 0, 40, 41, 47,
13, 14, 15, 16, 17, 18, 0, 0, 0, 0, 0, 0, 0, 0, 42, 48,
0, 0, 0, 0, 0, 0, 19, 20, 21, 22, 23, 24, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 25, 26, 27, 28, 29, 30,0,0,0,0,
0, 0, 0, 0, 0, 0, 31, 32, 33, 34, 35, 36,0,0,0,0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 43,0,0,0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,0,44,0,0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,0,0,45,0;
std::cout << "Original Matrix A:\n" << A << "\n\n";
// 构造 Givens 旋转矩阵
Eigen::JacobiRotation<Scalar> gr;
#ifndef Q_LAMBDA
Scalar G1_arr;
gr.makeGivens(A(0,12), A(6,12), &G1_arr);
Eigen::JacobiRotation<Scalar> G1 = gr.adjoint();
A.applyOnTheLeft(0,6, G1);
std::cout << "Matrix A after G1:\n" << A << "\n";
A(6, 12) = 0;
std::cout << "G1_arr: " << G1_arr << std::endl;
std::cout << "Original Rotation cos: " << gr.c() << "\t" << " sin:\t" << gr.s() << "\n\n";
std::cout << "Givens Adjoint cos: " << gr.adjoint().c() << "\t" << " sin:\t" << gr.adjoint().s() << "\n\n";
std::cout << "Givens transpose cos: " << gr.transpose().c() << "\t" << " sin:\t" << gr.transpose().s() << "\n\n";
std::cout << "Givens Rotation:\n" << gr.adjoint().c() << "\t" << -gr.adjoint().s() << "\n\n"
<< gr.adjoint().s() << "\t" << gr.adjoint().c() << "\n\n";
//针对实数,adjoint()和transpose()是等价的,makeGivens()根据传入参数cos和sin,我们可以外部构建出Givens,相当于把向量逆时针旋转:
// cos -sin
// cos sin
//applyOnTheLeft()中不知道为什么只能用.adjoint(),.adjoint()实际上构建了一个新的对象,其中cos取共轭,sin取反,JacobiRotation(conj(m_c), -m_s)
//只不过在applyOnTheLeft()中可能有根据A的行数构建一个主对角线为1,其他为0的真正可左乘到A上的Givens矩阵
//至于joan sola的公式(5.16),可能和Eigen中的实现有些出入,其cos的符号对不上公式,后面再说
gr.makeGivens(A(1,13), A(7,13));
Eigen::JacobiRotation<Scalar> G2 = gr.adjoint();
A.applyOnTheLeft(1,7, G2);
std::cout << "Matrix A after G2:\n" << A << "\n\n";
// A(7, 13) = 0;
gr.makeGivens(A(1,13), A(6,13));
Eigen::JacobiRotation<Scalar> G3 = gr.adjoint();
A.applyOnTheLeft(1,6, G3);
std::cout << "Matrix A after G3:\n" << A << "\n\n";
// A(6, 13) = 0;
gr.makeGivens(A(2,14), A(8,14));
Eigen::JacobiRotation<Scalar> G4 = gr.adjoint();
A.applyOnTheLeft(2,8, G4);
std::cout << "Matrix A after G4:\n" << A << "\n\n";
// A(8, 14) = 0;
gr.makeGivens(A(2,14), A(7,14));
Eigen::JacobiRotation<Scalar> G5 = gr.adjoint();
A.applyOnTheLeft(2,7, G5);
std::cout << "Matrix A after G5:\n" << A << "\n\n";
// A(7, 14) = 0;
gr.makeGivens(A(2,14), A(6,14));
Eigen::JacobiRotation<Scalar> G6 = gr.adjoint();
A.applyOnTheLeft(2,6, G6);
std::cout << "Matrix A after G6:\n" << A << "\n\n";
// A(6, 14) = 0;
#else
Eigen::Matrix<Scalar, 9, 16> B = A; //B用于跟使用Q_lambda作对比
Eigen::Matrix<Scalar, 9, 16> C = A;
Eigen::Matrix<Scalar, 9, 9> Q_lambda = Eigen::Matrix<Scalar, 9, 9>::Identity();//整体Q_lambda
Eigen::Matrix<Scalar, 9, 9> Q_lambda_C = Eigen::Matrix<Scalar, 9, 9>::Identity();//整体Q_lambda
//G1
gr.makeGivens(A(0,12), A(6,12));
Eigen::Matrix<Scalar, 9, 9> tmpQ = Eigen::Matrix<Scalar, 9, 9>::Identity();
tmpQ(0,0) = gr.c();
tmpQ(0,6) = -gr.s();
tmpQ(6,0) = gr.s();
tmpQ(6,6) = gr.c();
Q_lambda = tmpQ * Q_lambda;
A = tmpQ * A;
C.applyOnTheLeft(0,6, gr.adjoint());
Q_lambda_C.applyOnTheLeft(0,6, gr.adjoint());
std::cout << "G1 tmpQ: \n" << tmpQ << "\n\n";
std::cout << "after G1 Q_lambda: \n" << Q_lambda << "\n\n";
std::cout << "Matrix A after G1:\n" << A << "\n\n";
//G2
gr.makeGivens(A(1,13), A(7,13));
tmpQ.setIdentity();
tmpQ(1,1) = gr.c();
tmpQ(1,7) = -gr.s();
tmpQ(7,1) = gr.s();
tmpQ(7,7) = gr.c();
Q_lambda = tmpQ * Q_lambda;
A = tmpQ * A;
C.applyOnTheLeft(1,7, gr.adjoint());
Q_lambda_C.applyOnTheLeft(1,7, gr.adjoint());
std::cout << "G2 tmpQ: \n" << tmpQ << "\n\n";
std::cout << "after G2 Q_lambda: \n" << Q_lambda << "\n\n";
std::cout << "Matrix A after G2:\n" << A << "\n\n";
//G3
gr.makeGivens(A(1,13), A(6,13));
tmpQ.setIdentity();
tmpQ(1,1) = gr.c();
tmpQ(1,6) = -gr.s();
tmpQ(6,1) = gr.s();
tmpQ(6,6) = gr.c();
Q_lambda = tmpQ * Q_lambda;
A = tmpQ * A;
C.applyOnTheLeft(1,6, gr.adjoint());
Q_lambda_C.applyOnTheLeft(1,6, gr.adjoint());
std::cout << "G3 tmpQ: \n" << tmpQ << "\n\n";
std::cout << "after G3 Q_lambda: \n" << Q_lambda << "\n\n";
std::cout << "Matrix A after G3:\n" << A << "\n\n";
//G4
gr.makeGivens(A(2,14), A(8,14));
tmpQ.setIdentity();
tmpQ(2,2) = gr.c();
tmpQ(2,8) = -gr.s();
tmpQ(8,2) = gr.s();
tmpQ(8,8) = gr.c();
Q_lambda = tmpQ * Q_lambda;
A = tmpQ * A;
C.applyOnTheLeft(2,8, gr.adjoint());
Q_lambda_C.applyOnTheLeft(2,8, gr.adjoint());
std::cout << "G4 tmpQ: \n" << tmpQ << "\n\n";
std::cout << "after G4 Q_lambda: \n" << Q_lambda << "\n\n";
std::cout << "Matrix A after G4:\n" << A << "\n\n";
//G5
gr.makeGivens(A(2,14), A(7,14));
tmpQ.setIdentity();
tmpQ(2,2) = gr.c();
tmpQ(2,7) = -gr.s();
tmpQ(7,2) = gr.s();
tmpQ(7,7) = gr.c();
Q_lambda = tmpQ * Q_lambda;
A = tmpQ * A;
C.applyOnTheLeft(2,7, gr.adjoint());
Q_lambda_C.applyOnTheLeft(2,7, gr.adjoint());
std::cout << "G5 tmpQ: \n" << tmpQ << "\n\n";
std::cout << "after G5 Q_lambda: \n" << Q_lambda << "\n\n";
std::cout << "Matrix A after G5:\n" << A << "\n\n";
//G6
gr.makeGivens(A(2,14), A(6,14));
tmpQ.setIdentity();
tmpQ(2,2) = gr.c();
tmpQ(2,6) = -gr.s();
tmpQ(6,2) = gr.s();
tmpQ(6,6) = gr.c();
Q_lambda = tmpQ * Q_lambda;
A = tmpQ * A;
C.applyOnTheLeft(2,6, gr.adjoint());
Q_lambda_C.applyOnTheLeft(2,6, gr.adjoint());
std::cout << "G6 tmpQ: \n" << tmpQ << "\n\n";
std::cout << "after G6 Q_lambda: \n" << Q_lambda << "\n\n";
std::cout << "Matrix A after G6:\n" << A << "\n\n";
//执行旋转
std::cout << "Matrix A==B before Givens rotation:\n" << B << "\n\n";
B = Q_lambda * B;
std::cout << "Matrix A after Givens rotation:\n" << A << "\n\n";
std::cout << "Matrix B after Givens rotation:\n" << B << "\n\n";
std::cout << "Matrix C after Givens rotation:\n" << C << "\n\n";
#endif
#ifndef Q_LAMBDA
//使用6个Givens矩阵rollback G1.T * G2.T * G3.T * G4.T * G5.T * G6.T * A
A.applyOnTheLeft(2,6, G6.transpose());
A.applyOnTheLeft(2,7, G5.transpose());
A.applyOnTheLeft(2,8, G4.transpose());
A.applyOnTheLeft(1,6, G3.transpose());
A.applyOnTheLeft(1,7, G2.transpose());
A.applyOnTheLeft(0,6, G1.transpose());
std::cout << "Matrix A after Givens.T rotation rollback:\n" << A << "\n\n";
#else
//使用Q_lambda.T 执行rollback
A = Q_lambda.transpose() * A;
std::cout << "Matrix A after Givens.T rotation rollback:\n" << A << "\n\n";
B = Q_lambda.transpose() * B;
std::cout << "Matrix B after Givens.T rotation rollback:\n" << B << "\n\n";
C = Q_lambda_C.transpose() * C;
std::cout << "Matrix C after Givens.T rotation rollback:\n" << C << "\n\n";
#endif
}
int main(int argc, char** argv) {
// small_test(); //小规模测试
big_test(); //大规模测试
}
消去damp共需6个Givens矩阵,消去顺序遵照如下顺序,参考博客
从左到右逐列执行。
每一列,从下往上执行。
每一次的Givens矩阵由要消为0 的元素和对应对角线的元素确定。
对应此处,构建Givens旋转需要的元素分别为G1(37,43), G2(40, 44),G3(40,44上面一个),G4(42, 45),G5(42, 45上面一个),G6(42, 45上面第2个),注意,在构建过程中,由于A矩阵需要不断乘G,元素会发生变化,所以上面的元素分别指的是original A矩阵中这个元素位置所代表的元素。
构建Givens矩阵需要构建Eigen::JacobiRotation<Scalar>对象,调用Eigen函数makeGivens(),算出sin和cos,Givens矩阵形式即为
[
c
o
s
θ
?
s
i
n
θ
s
i
n
θ
c
o
s
θ
]
\begin{bmatrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{bmatrix}
[cosθsinθ??sinθcosθ?]
Givens矩阵的应用,可以调用makeGivens()函数,也可以手动构建Givens矩阵,然后左乘
J
l
J_l
Jl?。
故有3种测试和实现思路:
-
step by step构建G1~G6,并保存,并不显式构建 Q λ Q_{\lambda} Qλ?和 G G G(这也是论文中所说的方法),

在构建过程中分别调用applyOnTheLeft左乘到A矩阵上去(注意需要.adjoint()),即
A ′ = G 6 G 5 G 4 G 3 G 2 G 1 A \begin{align}A^{\prime }=G_6G_5G_4G_3G_2G_1A\end{align} A′=G6?G5?G4?G3?G2?G1?A??
则
Q λ = G 6 G 5 G 4 G 3 G 2 G 1 \begin{align}Q_{\lambda}=G_6G_5G_4G_3G_2G_1\end{align} Qλ?=G6?G5?G4?G3?G2?G1???
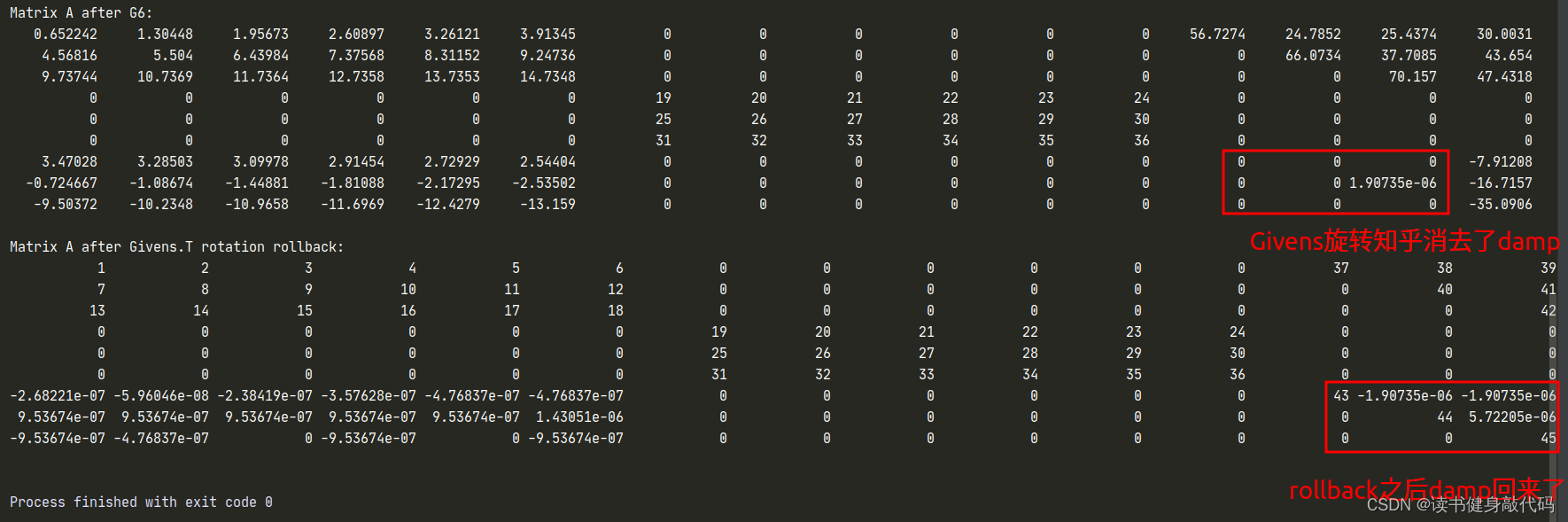
rollback阶段调用6次applyOnTheLeft()函数执行rollback:
Q λ T = ( G 6 G 5 G 4 G 3 G 2 G 1 ) T = G 1 T G 2 T G 3 T G 4 T G 5 T G 6 T \begin{align}Q_{\lambda}^T=(G_6G_5G_4G_3G_2G_1)^T=G_1^TG_2^TG_3^TG_4^TG_5^TG_6^T\end{align} QλT?=(G6?G5?G4?G3?G2?G1?)T=G1T?G2T?G3T?G4T?G5T?G6T???
A = G 1 T G 2 T G 3 T G 4 T G 5 T G 6 T A ′ \begin{align}A=G_1^TG_2^TG_3^TG_4^TG_5^TG_6^TA^{\prime}\end{align} A=G1T?G2T?G3T?G4T?G5T?G6T?A′??
在代码中把#define Q_LAMBDA宏注释掉即可,结果如下:
-
开启
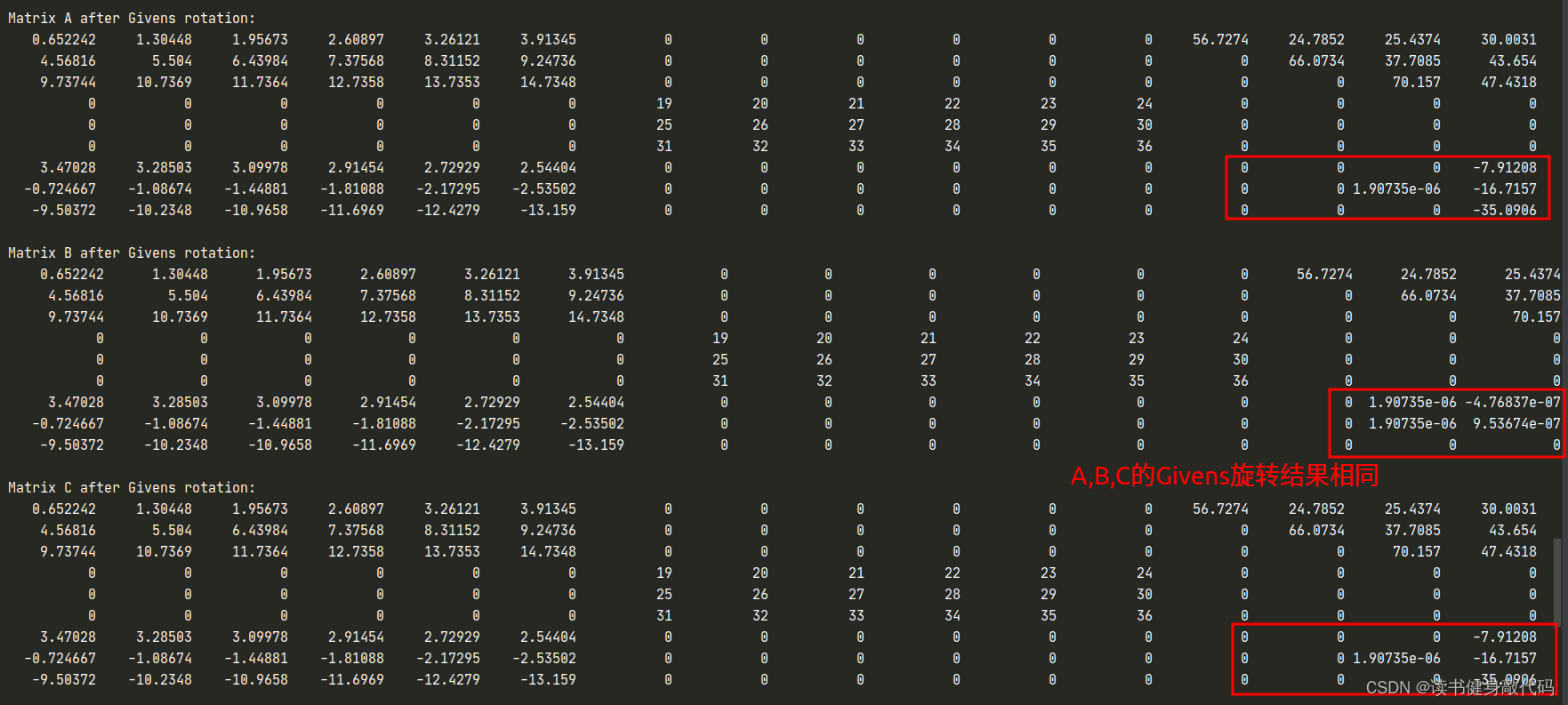
#define Q_LAMBDA宏,显式构建 Q λ Q_{\lambda} Qλ?和 G G G,在构建过程中直接使用矩阵乘法而非applyOnTheLeft函数作用于 A A A, Q λ Q_{\lambda} Qλ?构建完成后,执行B = Q_lambda * B;来测试A,B是否相等,最后同样使用 Q λ T Q_{\lambda}^T QλT?来rollback,2和3的测试结果一起给出。 -
开启
#define Q_LAMBDA宏,不显式构建 G G G,但是使用applyOnTheLeft函数显式构建 Q λ Q_{\lambda} Qλ?(注意需.adjoint()),对应代码中的Q_lambda_C,使用 Q λ T Q_{\lambda}^T QλT?完成rollback,结果如下:
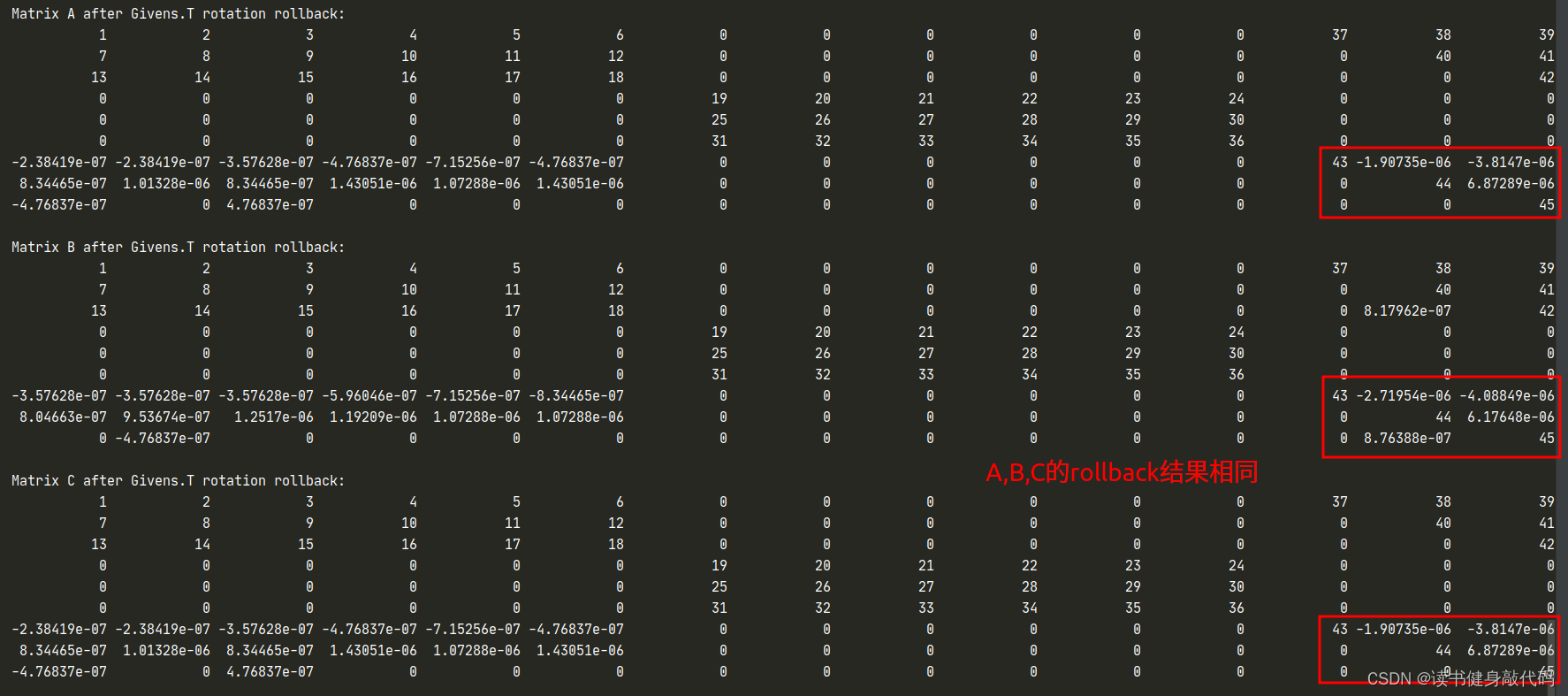
至此,完成了Givens旋转add damp以及rollback的代码实现,可以继续添加到LM中,在复现过程中我使用了上述方法3。
joan sola这篇文献中计算cos,sin的方法如下,但是在Eigen中不是这样计算的,留心注意一下,
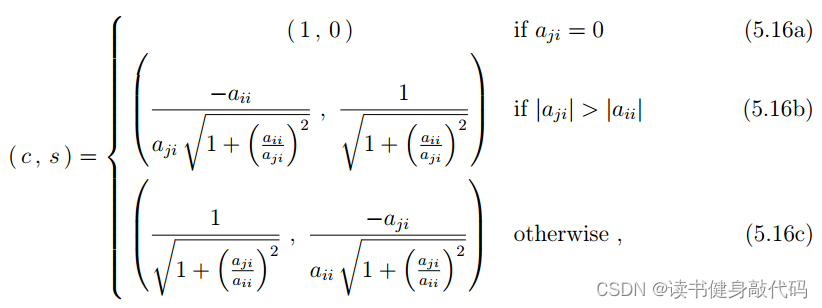
Eigen中该部分代码如下:
// specialization for complexes
template<typename Scalar>
void JacobiRotation<Scalar>::makeGivens(const Scalar& p, const Scalar& q, Scalar* r, internal::true_type)
{
using std::sqrt;
using std::abs;
using numext::conj;
if(q==Scalar(0))
{
m_c = numext::real(p)<0 ? Scalar(-1) : Scalar(1);
m_s = 0;
if(r) *r = m_c * p;
}
else if(p==Scalar(0))
{
m_c = 0;
m_s = -q/abs(q);
if(r) *r = abs(q);
}
else
{
RealScalar p1 = numext::norm1(p);
RealScalar q1 = numext::norm1(q);
if(p1>=q1)
{
Scalar ps = p / p1;
RealScalar p2 = numext::abs2(ps);
Scalar qs = q / p1;
RealScalar q2 = numext::abs2(qs);
RealScalar u = sqrt(RealScalar(1) + q2/p2);
if(numext::real(p)<RealScalar(0))
u = -u;
m_c = Scalar(1)/u;
m_s = -qs*conj(ps)*(m_c/p2);
if(r) *r = p * u;
}
else
{
Scalar ps = p / q1;
RealScalar p2 = numext::abs2(ps);
Scalar qs = q / q1;
RealScalar q2 = numext::abs2(qs);
RealScalar u = q1 * sqrt(p2 + q2);
if(numext::real(p)<RealScalar(0))
u = -u;
p1 = abs(p);
ps = p/p1;
m_c = p1/u;
m_s = -conj(ps) * (q/u);
if(r) *r = ps * u;
}
}
}
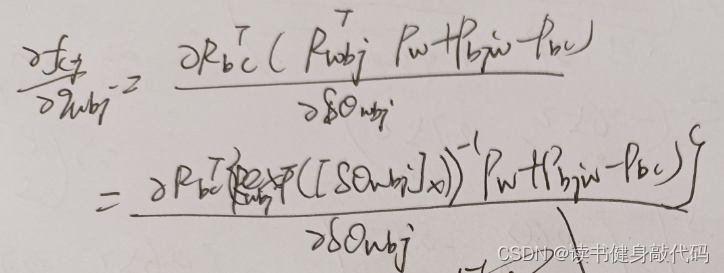
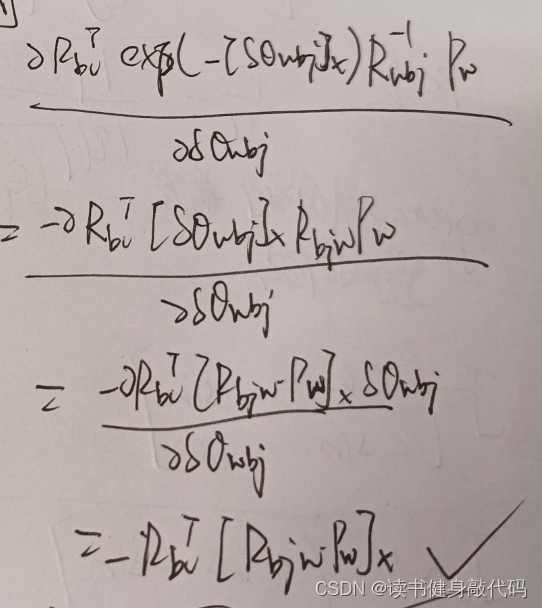
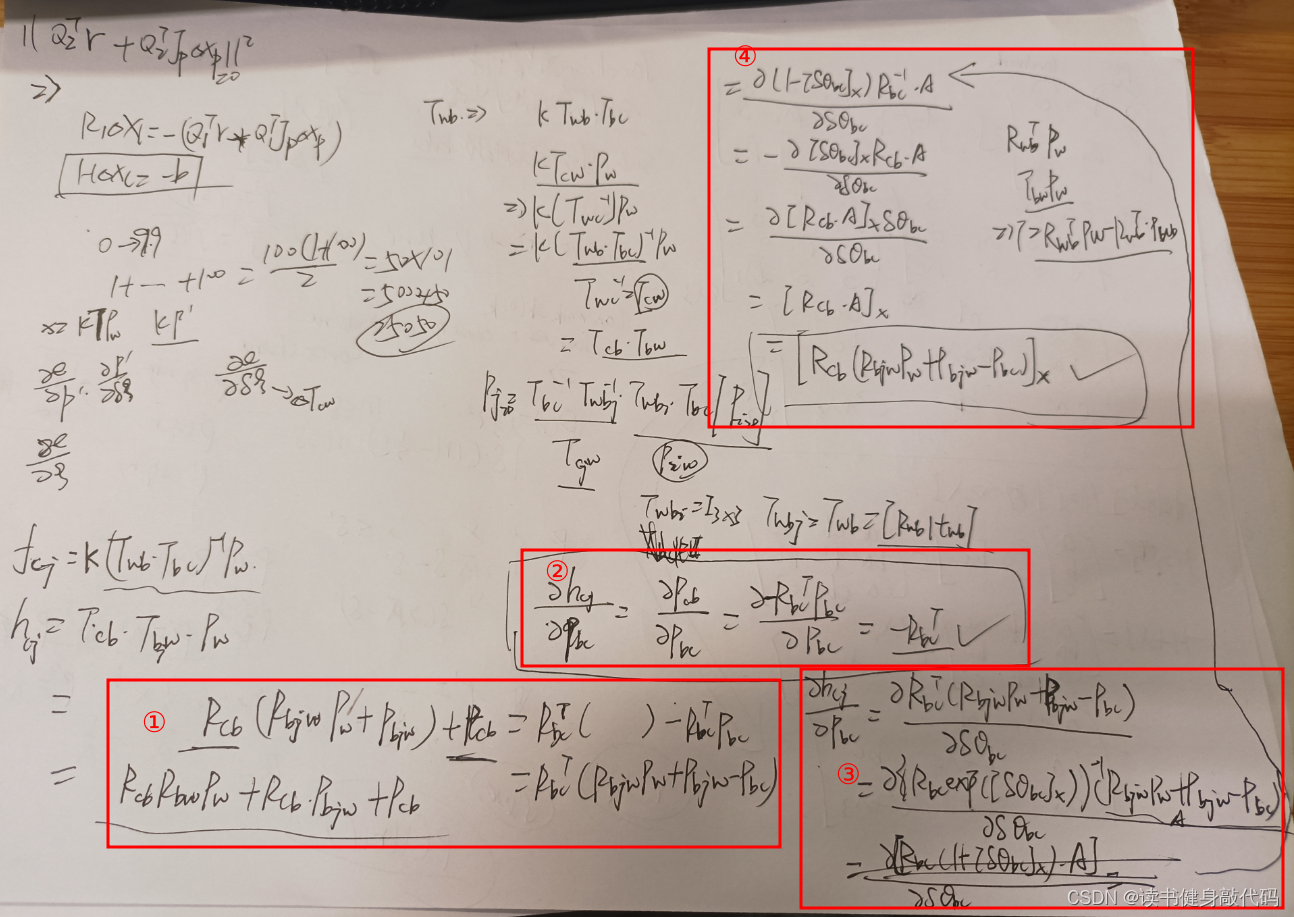
3. Jacobian推导
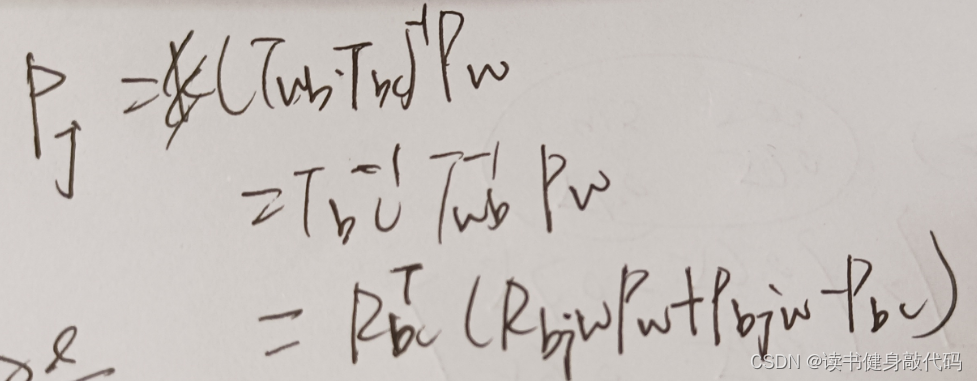
复现过程中添加了imu,虽然外参 T b c T_{bc} Tbc?设置为 I d e n t i t y ( ) Identity() Identity(),但Jacobian和纯视觉不同,需要重新推导。
类似于VINS-MONO中的推导,参考博客,这里直接给出 p w p_w pw?,更简单。
视觉pose部分:
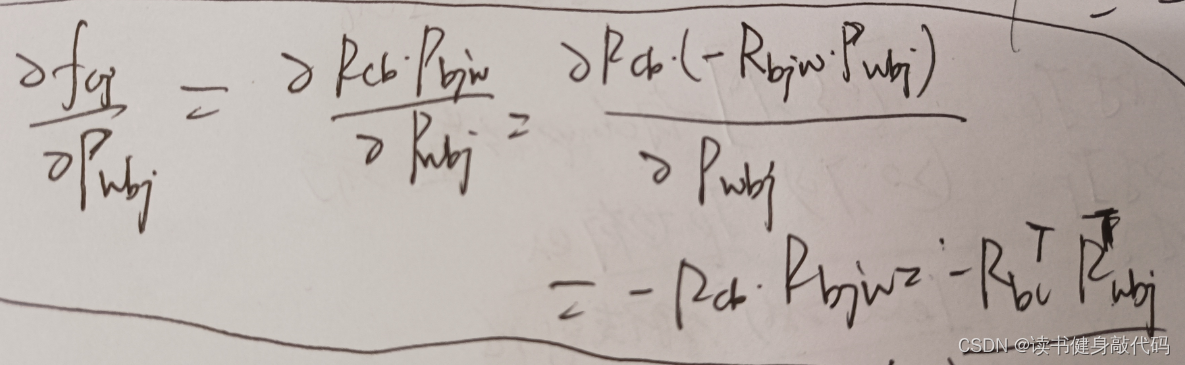
外参部分:
4. Refernece
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Git 大量log查看:git log --pretty=oneline
- 飞天使-jumpserver-docker跳板机安装
- js变量提升
- java类装载的执行过程
- Idea快速创建测试类
- GZ075 云计算应用赛题第7套
- matplotlib颜色合集——各种常见简单图形(上)
- 如何将TRIZ应用于非技术领域的创新问题?
- vue3源码(二)reactive&effect
- 初识大数据,一文掌握大数据必备知识文集(3)