机器人运动学——阿克曼小车
机器人运动学是从几何角度描述和研究机器人的位置、速度和加速度随时间的变化规律的科学,它不涉及机器人本体的物理性质和加在其上的力。这里分享一下在学习阿克曼小车过程中,对运动学的正逆解的理解。
正解:已知机器人各个关节的运动,求解机器人本体x,y,z轴的运动。
逆解:已知机器人本体x,y,z轴方向的运动,求解各个关节的运动。
一、阿克曼转向几何
阿克曼转向几何是一种为了解决交通工具转弯时,内外转向轮路径指向的圆心不同的几何学。通常情况下,内侧轮胎转角更大。同时要求4个轮子运动方向垂直相交与一点,四个轮子按照同一个圆心旋转。如下图所示,为阿克曼机器人转向时的状态。
二、阿克曼小车
阿克曼机构结构简单、可靠性高,不需要过多的复杂部件,维护和保养成本较低,可以提高设备的使用寿命。
阿克曼小车运动原理分为很多情况,主要是直行状态下和转弯状态下。在直行状态下,小车各轮轮毂转速相同,因此直行状态下阿克曼小车前后两个轴都不需要转向。在转弯状态下,阿克曼小车前后轴的转向角度需要调整,使得车辆能够顺利完成转弯。以下以四轮的阿克曼小车为例,通过运动学分析,求解小车的转角和速度。
因为这台阿克曼小车是后驱的,所以求逆解时计算前轮的转角和后轮的速度,求正解的时候计算小车本体的速度。

?图1
?符号说明:
| δ_l | 左前轮转角 |
| δ_r | 右前轮转角 |
| V_L | 左后轮速度 |
| V_R | 右后轮速度 |
| R | 转弯半径 |
| W | 轮距 |
| L | 轴距 |
| V_x | 小车本体x方向速度 |
| V_z | 小车本体z方向速度 |
| W | 轮距 |
| 角速度 |
三、逆解
我们在已知小车本体目标速度V_x、V_y、V_z的情况下,求解前轮的转角δ_l、δ_r,以及后轮的线速度V_L、V_R。
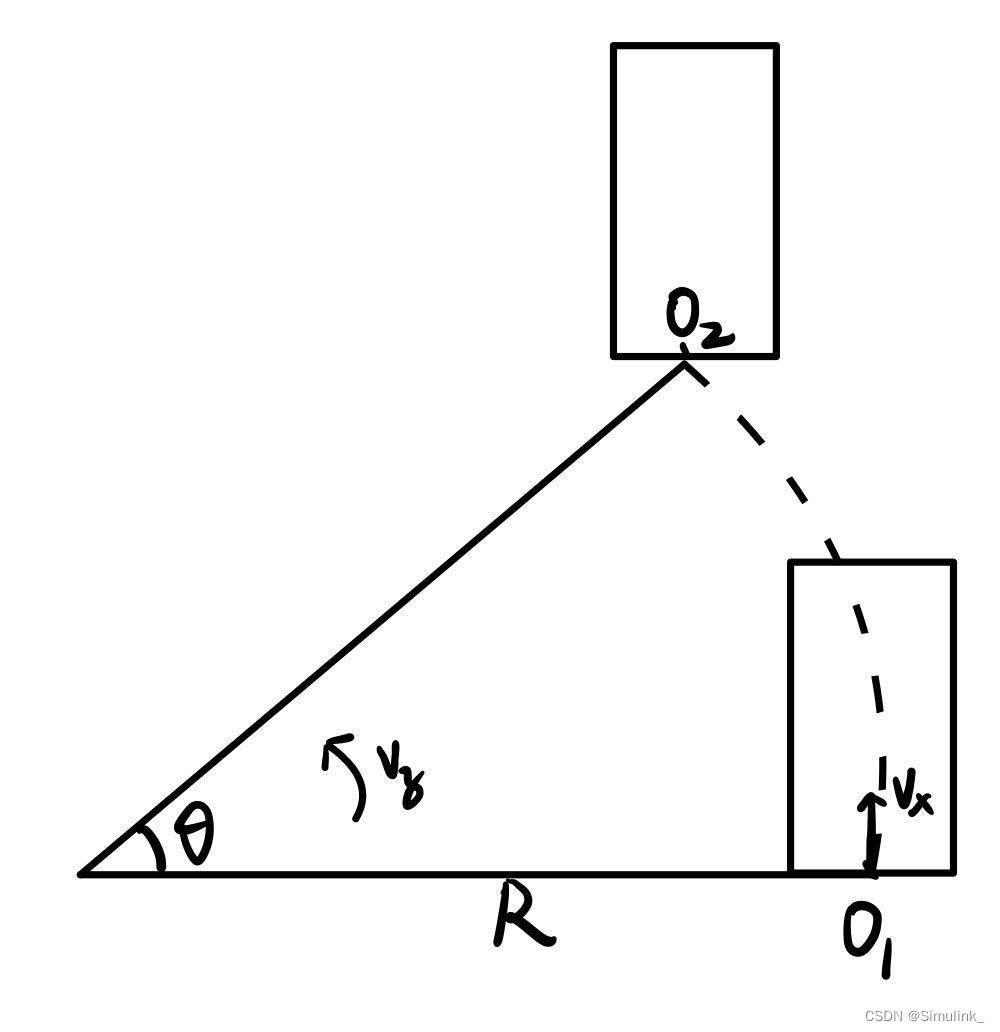
?图2
如图可以得到:
所以:?,即求得了转弯半径R。
因为线速度和角速度之间存在着关系:
所以:
? ? ? ? ???
再有,通过图1中的几何关系,可以计算得到:
????????????????????????????????????????????????????????????????????????????
其实,图1中的前轮中点处的角度,还存在阿克曼角关系:
四、正解
对于正解,相对来说就简单许多,
?????
因为
所以:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Transformer架构详解
- Python——数据库操作
- 探索Python中生成多样随机数据的神奇之旅
- 基于Flume+Kafka+Hbase+Flink+FineBI的实时综合案例(二)数据源
- 分享5款优秀的软件工具,值得收藏
- 解决torchvision.model下载预训练模型太慢的问题
- Beego之Beego快速入门
- 企业级 接口自动化测试框架:Pytest+Allure+Excel
- TS 36.212 V12.0.0-信道编码、复用和交织(2)-上行传输信道和控制信息
- Kafka-服务端-KafkaController