机器人持续学习基准LIBERO系列3——相机画面可视化及单步移动更新
发布时间:2024年01月11日
0.前置
- 机器人持续学习基准LIBERO系列1——基本介绍与安装测试
- 机器人持续学习基准LIBERO系列2——路径与基准基本信息
- 后面的代码是在这些基础上完成的
1.导包
from libero.libero.envs import OffScreenRenderEnv
from IPython.display import display
from PIL import Image
import torch
import torchvision
2.创建环境
env_args = {
"bddl_file_name": os.path.join(os.path.join(get_libero_path("bddl_files"), task.problem_folder, task.bddl_file)),
"camera_heights": 128,
"camera_widths": 128
}
env = OffScreenRenderEnv(**env_args)
#设置种子
env.seed(0)
#环境重置
env.reset()
#初始化
env.set_init_state(init_states[0])
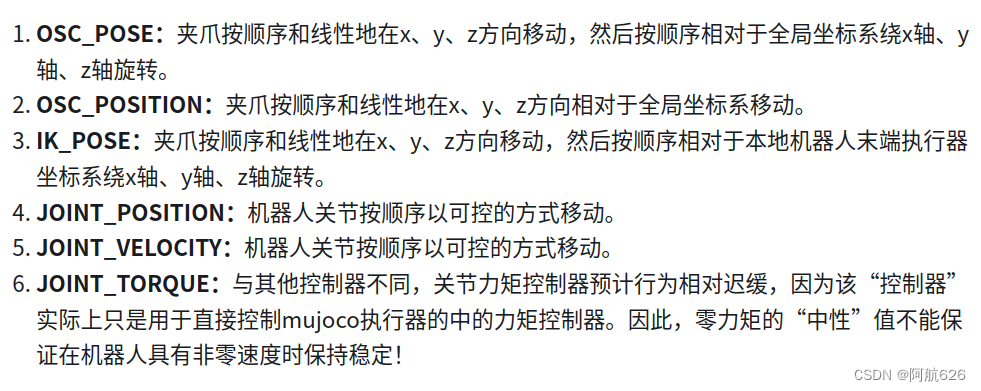
3.运动机械臂更新环境,获取相机视角
- 这里的控制模式是OSC_POSE,参考robosuite相关资料,这篇博文里有控制模式相关解释,大致就是控制机械臂末端的平移和旋转
#运动机械臂更新环境
obs, _, _, _ = env.step([0.] * 7)
#获取手外相机视角图片
image = (obs["agentview_image"])
image_ = (obs["robot0_eye_in_hand_image"])
display(Image.fromarray(image))
display(Image.fromarray(image_))
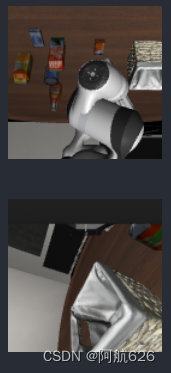
obs, _, _, _ = env.step([500.,0.,0.,0.,0.,0.,0.] )
#获取手外相机视角图片
image = (obs["agentview_image"])
display(Image.fromarray(image))
obs, _, _, _ = env.step([500.,0.,0.,0.,0.,0.,0.] )
#获取手外相机视角图片
image = (obs["agentview_image"])
display(Image.fromarray(image))
obs, _, _, _ = env.step([500.,0.,0.,0.,0.,0.,0.] )
#获取手外相机视角图片
image = (obs["agentview_image"])
display(Image.fromarray(image))
运行结果
 ## 4.关闭环境
## 4.关闭环境
env.close()
文章来源:https://blog.csdn.net/weixin_53610475/article/details/135483801
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- JAVA变量快速入门
- AtCoder Beginner Contest 336 E题解
- JAVA_ArrayList添加元素时的源码分析(jdk17)
- 大模型机器人原理解析:如何从RT/RT2、Berkeley Gello到发展到斯坦福Mobile ALOHA、Google家务机器人
- 2024年【天津市安全员C证】找解析及天津市安全员C证模拟考试题
- APP端网络测试与弱网模拟!
- Python如何导入第三方包
- 代码随想录27期|Python|Day27|回溯算法|39.组合总和|40.组合总和II|131.分割回文串
- Dora-rs 机器人框架学习教程(2)——摄像头数据读取
- 等保到底是什么?你可能对它一无所知