Open3D基于半径滤波去除噪点(6)
发布时间:2024年01月08日
一、原理介绍
半径滤波是一种常用的点云滤波方法,它通过在点云中采样一个指定半径内的点来减少数据量和去除噪声。在半径滤波中,对于给定半径大小,点云中每个点周围的邻域内都会被一个新的点所代替,这个新的点通常是该邻域内所有点的几何中心或者体素格子的中心。
半径滤波通常用于稀疏化点云,以降低点云数据密度并去除一些小型噪声,非常适用于大型点云数据的处理。通过调整半径大小,可以控制点云重建后的点云密度,从而实现对点云数据的粗粒化或细粒化处理。
总的来说,半径滤波是一种简单且有效的点云滤波方法,适用于许多实际应用场景中的预处理和数据降噪操作。
二、具体实现
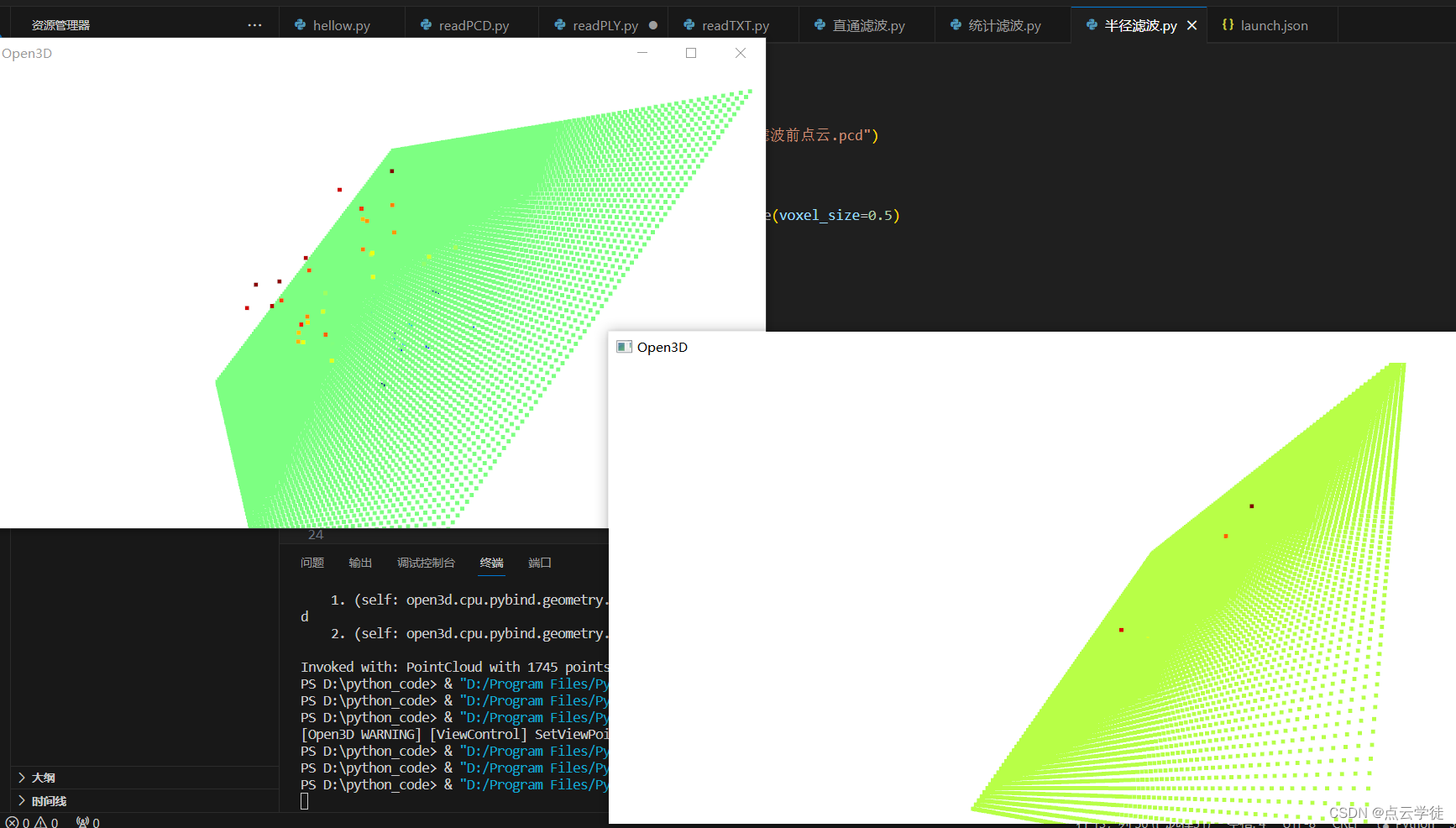
1.代码
代码如下(示例):
import open3d as o3d
# 读取点云数据
point_cloud = o3d.io.read_point_cloud("D:\\shuju\\滤波前点云.pcd")
# 设置半径滤波的参数
# 这里以半径为0.5为例
filtered_point_cloud = point_cloud.voxel_down_sample(voxel_size=0.5)
# 创建可视化窗口并添加原始点云和滤波后的点云
vis_original = o3d.visualization.Visualizer()
vis_filtered = o3d.visualization.Visualizer()
vis_original.create_window(width=800, height=600)
vis_filtered.create_window(width=800, height=600)
vis_original.add_geometry(point_cloud)
vis_filtered.add_geometry(filtered_point_cloud)
# 显示原始点云和滤波后的点云
vis_original.run()
vis_filtered.run()
# 写出滤波后的点云数据
o3d.io.write_point_cloud("D:\\shuju\\结果点云.pcd", filtered_point_cloud)
文章来源:https://blog.csdn.net/weixin_44329757/article/details/135466600
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 两种实现WebSocket的方式,基于Java实现WebSocket。
- 世微 AP5186 3.6-100V 三功能降压恒流LED驱动IC
- ATA-L50水声功率放大器:可驱动水声换能器,可用于水下通信测试
- podman configure insecure certificate registry【podman 设置非安全镜像仓库】
- Spring MVC拦截器实现 - 权限验证与日志记录
- 蓝桥杯练习题(四)
- linux源码编译安装ninja
- 大数据Doris(四十四):查询物化视图和自动匹配
- 观点提炼 美国CISA、ODN等发布《SBOM推荐实践指南》
- Docker实战