深度学习——R-CNN目标检测原理
R-CNN系列算法需要先产生候选区域,再对候选区域做分类和位置坐标的预测,这类算法被称为两阶段目标检测算法。近几年,很多研究人员相继提出一系列单阶段的检测算法,只需要一个网络即可同时产生候选区域并预测出物体的类别和位置坐标。与R-CNN系列算法不同,YOLOv3使用单个网络结构,在产生候选区域的同时即可预测出物体类别和位置,不需要分成两阶段来完成检测任务。
另外,YOLOv3算法产生的预测框数目比Faster R-CNN少很多。Faster R-CNN中每个真实框可能对应多个标签为正的候选区域,而YOLOv3里面每个真实框只对应一个正的候选区域。这些特性使得YOLOv3算法具有更快的速度,能到达实时响应的水平。Joseph Redmon等人在2015年提出YOLO(You Only Look Once,YOLO)算法,通常也被称为YOLOv1;2016年,他们对算法进行改进,又提出YOLOv2版本;2018年发展出YOLOv3版本。
YOLOv3模型设计思想
YOLOv3算法的基本思想可以分成两部分:
1.按一定规则在图片上产生一系列的候选区域,然后根据这些候选区域与图片上物体真实框之间的位置关系对候选区域进行标注。跟真实框足够接近的那些候选区域会被标注为正样本,同时将真实框的位置作为正样本的位置目标。偏离真实框较大的那些候选区域则会被标注为负样本,负样本不需要预测位置或者类别。
2.使用卷积神经网络提取图片特征并对候选区域的位置和类别进行预测。这样每个预测框就可以看成是一个样本,根据真实框相对它的位置和类别进行了标注而获得标签值,通过网络模型预测其位置和类别,将网络预测值和标签值进行比较,就可以建立起损失函数。
YOLOv3算法训练过程的流程图如 图8 所示:

图8 左边是输入图片,上半部分所示的过程是使用卷积神经网络对图片提取特征,随着网络不断向前传播,特征图的尺寸越来越小,每个像素点会代表更加抽象的特征模式,直到输出特征图,其尺寸减小为原图的1/32。
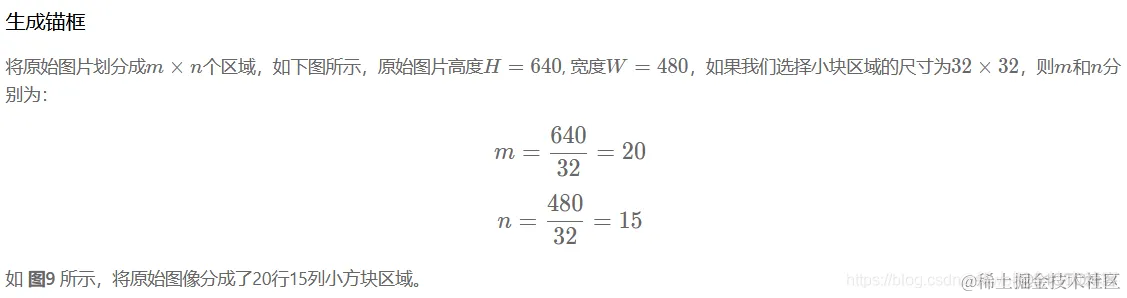
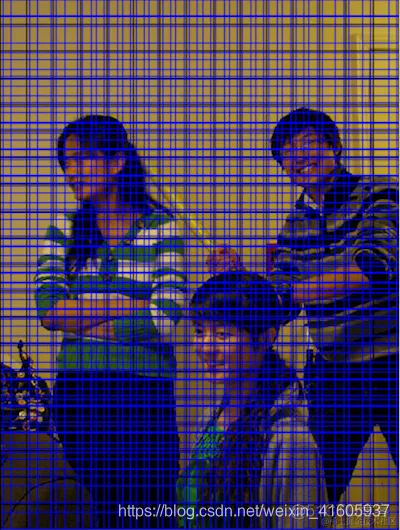
图8 下半部分描述了生成候选区域的过程,首先将原图划分成多个小方块,每个小方块的大小是32×32,然后以每个小方块为中心分别生成一系列锚框,整张图片都会被锚框覆盖到。在每个锚框的基础上产生一个与之对应的预测框,根据锚框和预测框与图片上物体真实框之间的位置关系,对这些预测框进行标注。
将上方支路中输出的特征图与下方支路中产生的预测框标签建立关联,创建损失函数,开启端到端的训练过程。
产生候选区域
如何产生候选区域,是检测模型的核心设计方案。目前大多数基于卷积神经网络的模型所采用的方式大体如下:
-
按一定的规则在图片上生成一系列位置固定的锚框,将这些锚框看作是可能的候选区域。
-
对锚框是否包含目标物体进行预测,如果包含目标物体,还需要预测所包含物体的类别,以及预测框相对于锚框位置需要调整的幅度。

YOLOv3算法会在每个区域的中心,生成一系列锚框。为了展示方便,我们先在图中第十行第四列的小方块位置附近画出生成的锚框,如 图10 所示。注意:这里为了跟程序中的编号对应,最上面的行号是第0行,最左边的列号是第0列。

图11 展示在每个区域附近都生成3个锚框,很多锚框堆叠在一起可能不太容易看清楚,但过程跟上面类似,只是需要以每个区域的中心点为中心,分别生成3个锚框。
生成预测框
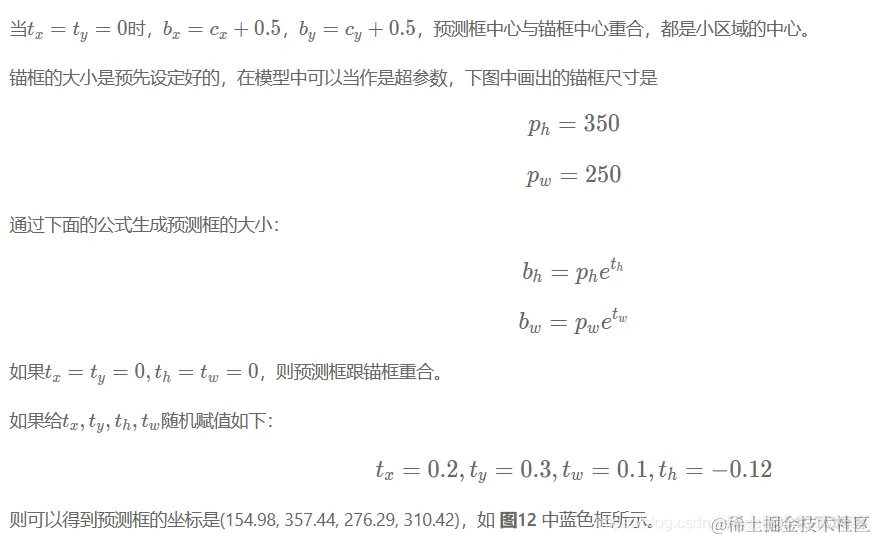
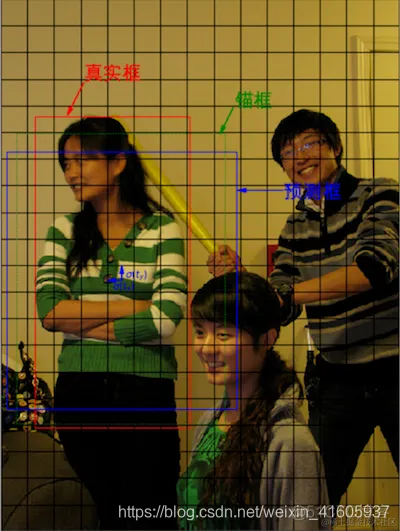
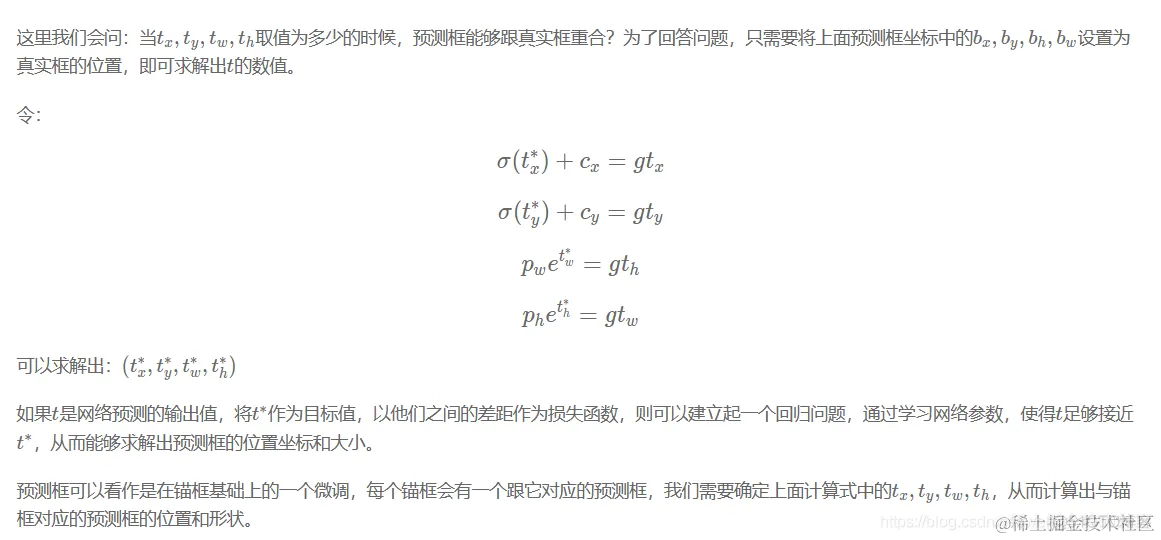
在前面已经指出,锚框的位置都是固定好的,不可能刚好跟物体边界框重合,需要在锚框的基础上进行位置的微调以生成预测框。预测框相对于锚框会有不同的中心位置和大小,采用什么方式能得到预测框呢?我们先来考虑如何生成其中心位置坐标。
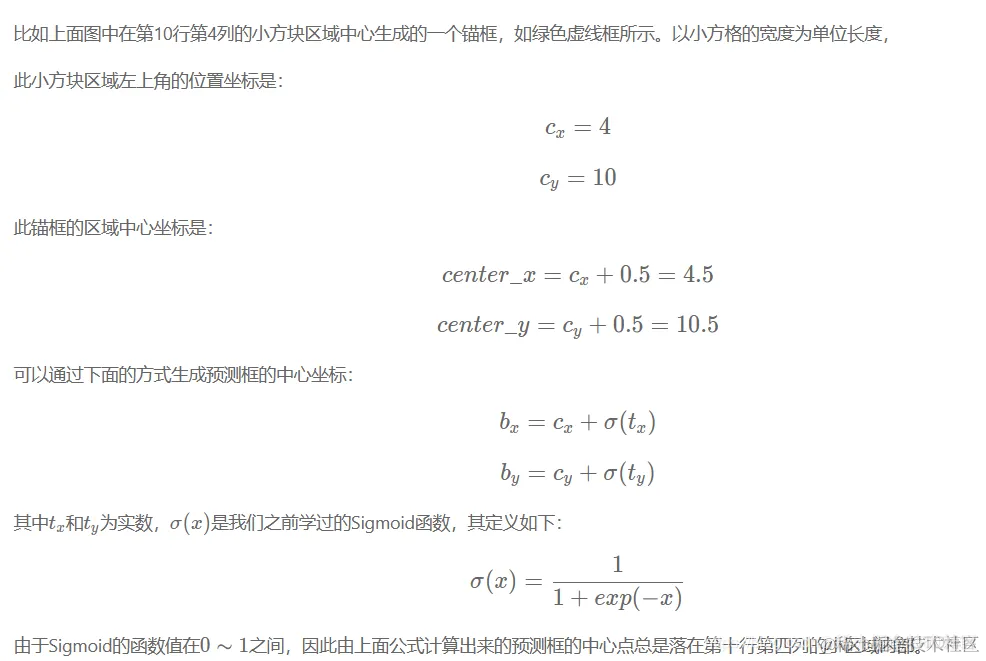
为什么是的选择Sigmoid函数来这位这样的一个的预测的函数?由于Sigmoid的函数值在0~10 \thicksim 10~1之间,因此由上面公式计算出来的预测框的中心点总是落在第十行第四列的小区域内部。
对候选区域进行标注
每个区域可以产生3种不同形状的锚框,每个锚框都是一个可能的候选区域,对这些候选区域我们需要了解如下几件事情:
-
锚框是否包含物体,这可以看成是一个二分类问题,使用标签objectness来表示。当锚框包含了物体时,objectness=1,表示预测框属于正类;当锚框不包含物体时,设置objectness=0,表示锚框属于负类。
-
如果锚框包含了物体,那么它对应的预测框的中心位置和大小应该是多少,或者说上面计算式中的tx,ty,tw,tht_x, t_y, t_w, t_htx,ty,tw,th应该是多少,使用location标签。
-
如果锚框包含了物体,那么具体类别是什么,这里使用变量label来表示其所属类别的标签。
选取任意一个锚框对它进行标注,也就是需要确定其对应的objectness, (tx,ty,tw,th)(t_x, t_y, t_w, t_h)(tx,ty,tw,th)和label,下面将分别讲述如何确定这三个标签的值。
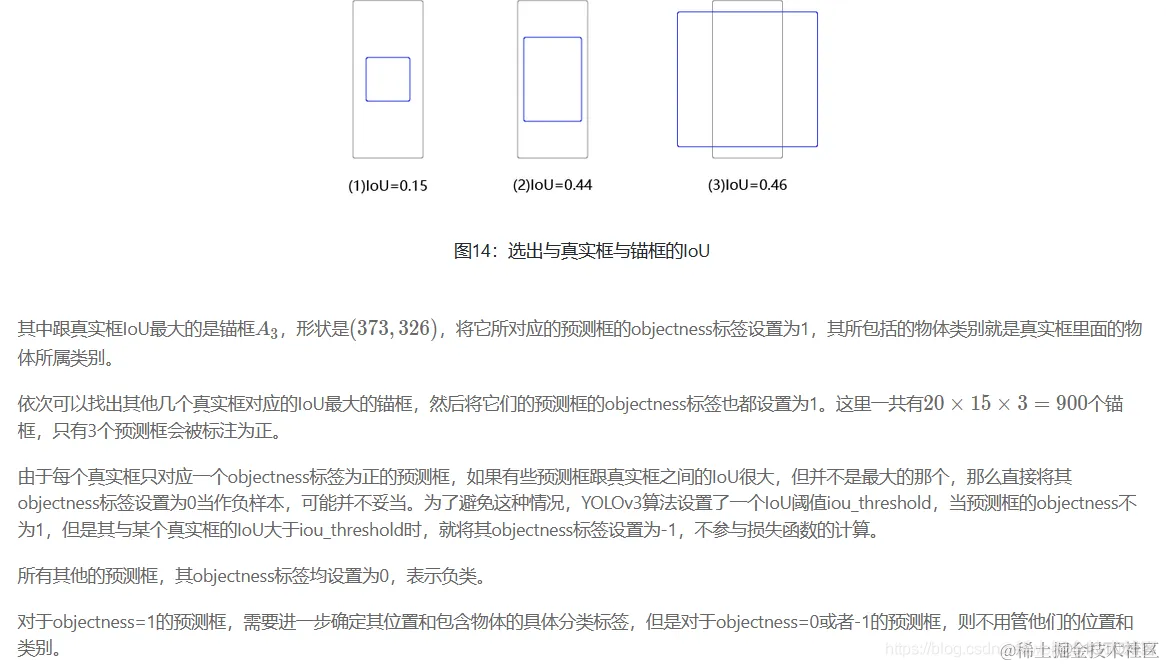
标注锚框是否包含物体
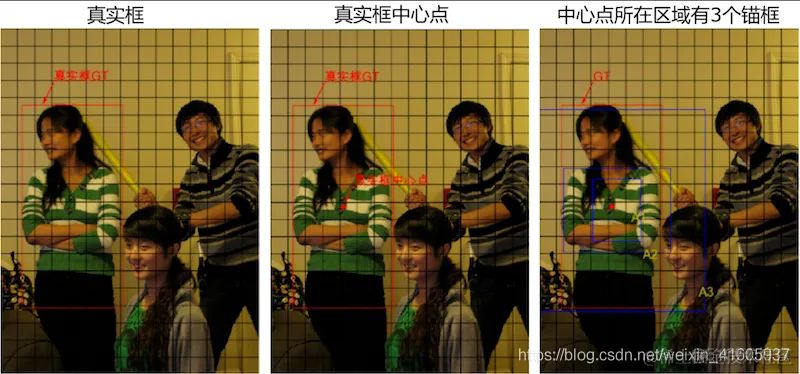
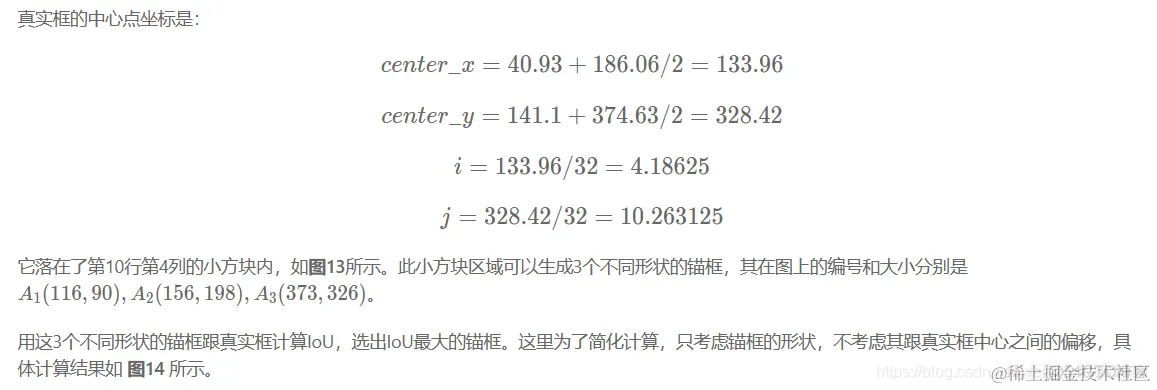
如 图13 所示,这里一共有3个目标,以最左边的人像为例,其真实框是(40.93,141.1,186.06,374.63)(40.93, 141.1, 186.06, 374.63)(40.93,141.1,186.06,374.63)。
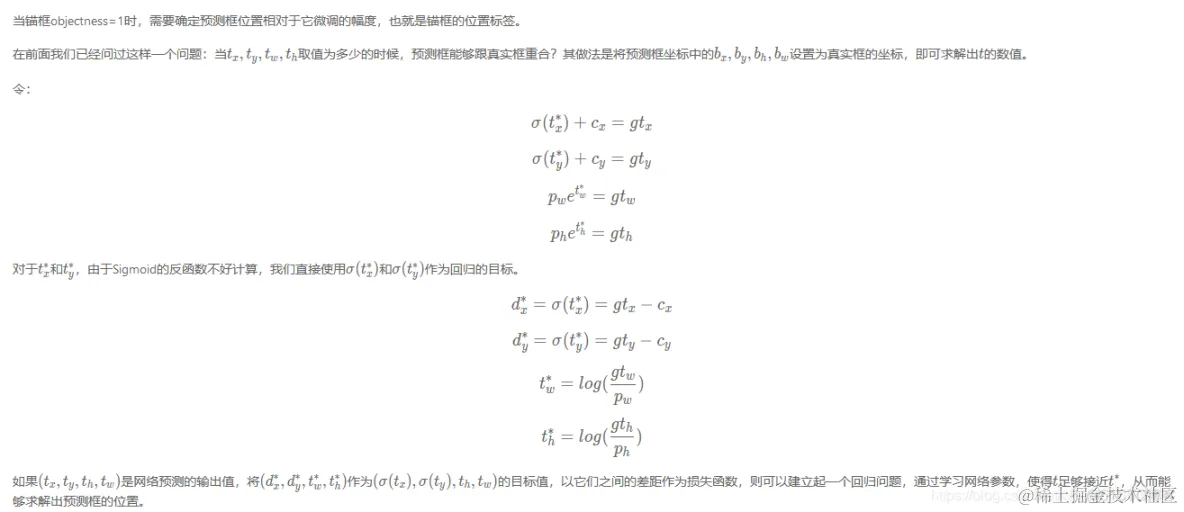
标注预测框的位置坐标标签
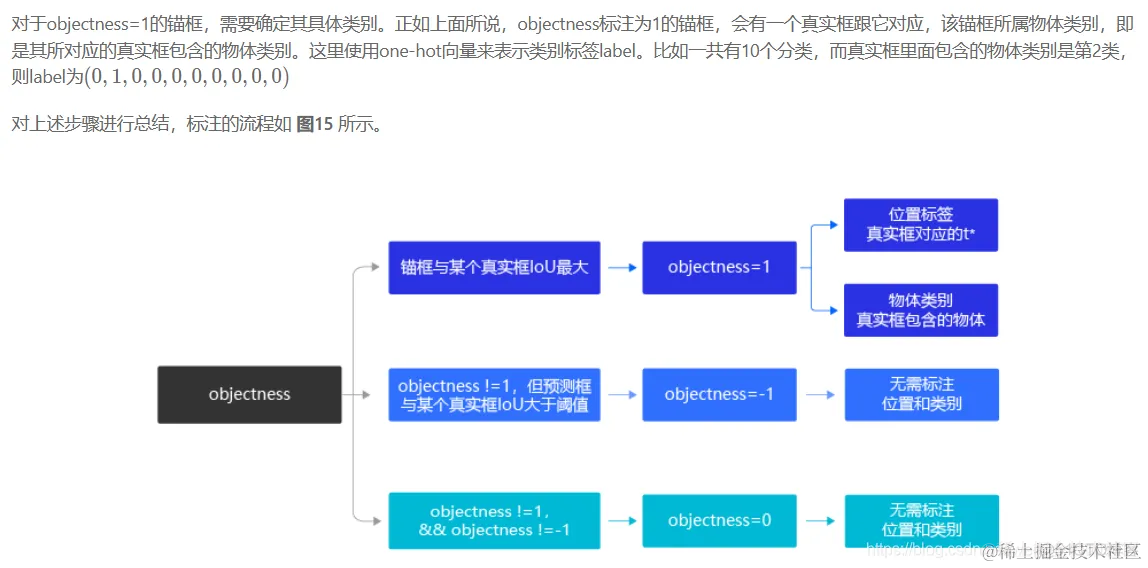
标注锚框包含物体类别的标签

卷积神经网络提取特征
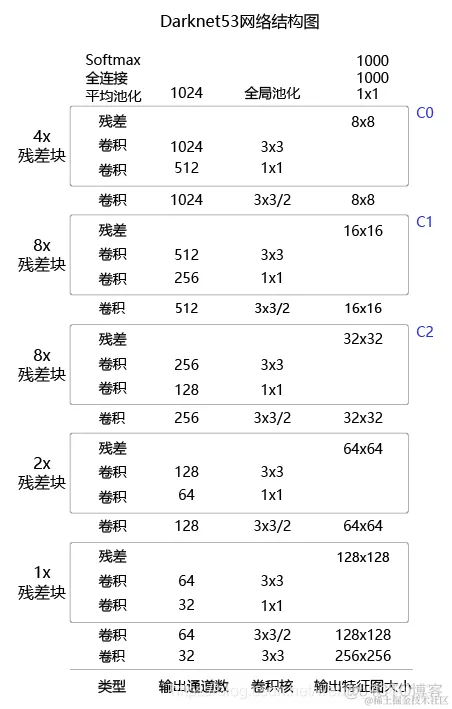
们已经学习过了通过卷积神经网络提取图像特征。通过连续使用多层卷积和池化等操作,能得到语义含义更加丰富的特征图。在检测问题中,也使用卷积神经网络逐层提取图像特征,通过最终的输出特征图来表征物体位置和类别等信息。YOLOv3算法使用的骨干网络是Darknet53。Darknet53网络的具体结构如 图16 所示,在ImageNet图像分类任务上取得了很好的成绩。在检测任务中,将图中C0后面的平均池化、全连接层和Softmax去掉,保留从输入到C0部分的网络结构,作为检测模型的基础网络结构,也称为骨干网络。YOLOv3模型会在骨干网络的基础上,再添加检测相关的网络模块。
根据输出特征图计算预测框位置和类别
建立输出特征图与预测框之间的关联
现在观察特征图,经过多次卷积核池化之后,其步幅stride=32,640×480640 \times 480640×480大小的输入图片变成了20×1520\times1520×15的特征图;而小方块区域的数目正好是20×1520\times1520×15,也就是说可以让特征图上每个像素点分别跟原图上一个小方块区域对应。这也是为什么我们最开始将小方块区域的尺寸设置为32的原因,这样可以巧妙的将小方块区域跟特征图上的像素点对应起来,解决了空间位置的对应关系。
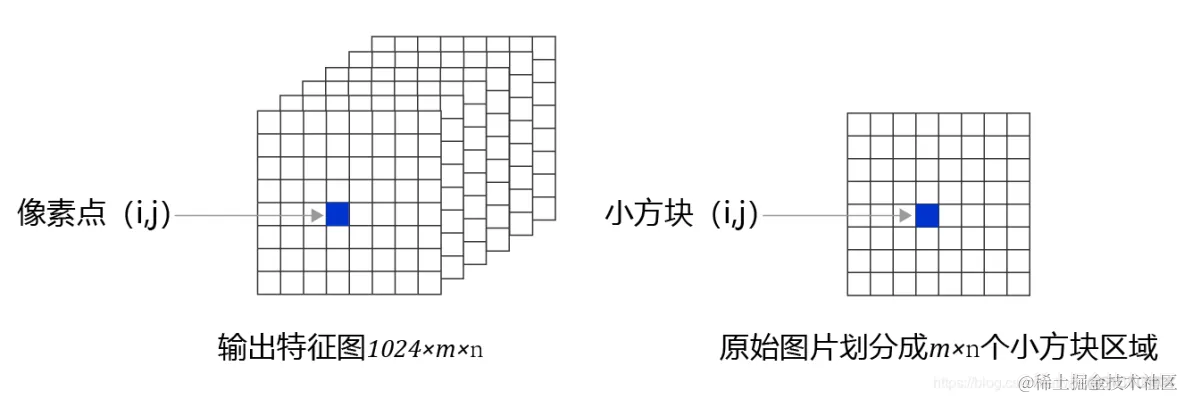
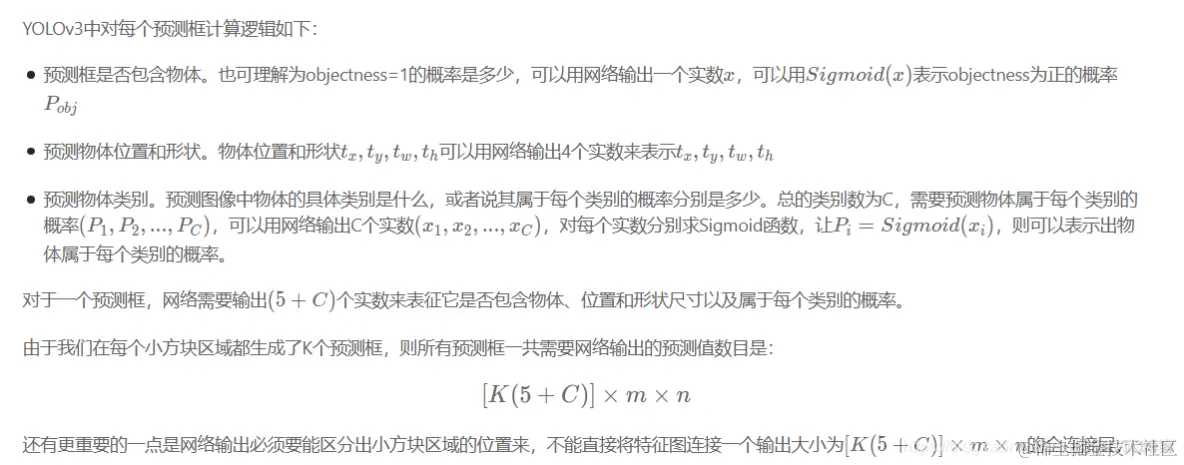
面需要将像素点(i,j)(i,j)(i,j)与第i行第j列的小方块区域所需要的预测值关联起来,每个小方块区域产生K个预测框,每个预测框需要(5+C)(5 + C)(5+C)个实数预测值,则每个像素点相对应的要有K(5+C)K(5 + C)K(5+C)个实数。为了解决这一问题,对特征图进行多次卷积,并将最终的输出通道数设置为K(5+C)K(5 + C)K(5+C),即可将生成的特征图与每个预测框所需要的预测值巧妙的对应起来。当然,这种对应是为了将骨干网络提取的特征对接输出层来形成Loss。实际中,这几个尺寸可以随着任务数据分布的不同而调整,只要保证特征图输出尺寸(控制卷积核和下采样)和输出层尺寸(控制小方块区域的大小)相同即可。
多尺度检测
目前我们计算损失函数是在特征图P0的基础上进行的,它的步幅stride=32。特征图的尺寸比较小,像素点数目比较少,每个像素点的感受野很大,具有非常丰富的高层级语义信息,可能比较容易检测到较大的目标。为了能够检测到尺寸较小的那些目标,需要在尺寸较大的特征图上面建立预测输出。如果我们在C2或者C1这种层级的特征图上直接产生预测输出,可能面临新的问题,它们没有经过充分的特征提取,像素点包含的语义信息不够丰富,有可能难以提取到有效的特征模式。在目标检测中,解决这一问题的方式是,将高层级的特征图尺寸放大之后跟低层级的特征图进行融合,得到的新特征图既能包含丰富的语义信息,又具有较多的像素点,能够描述更加精细的结构。
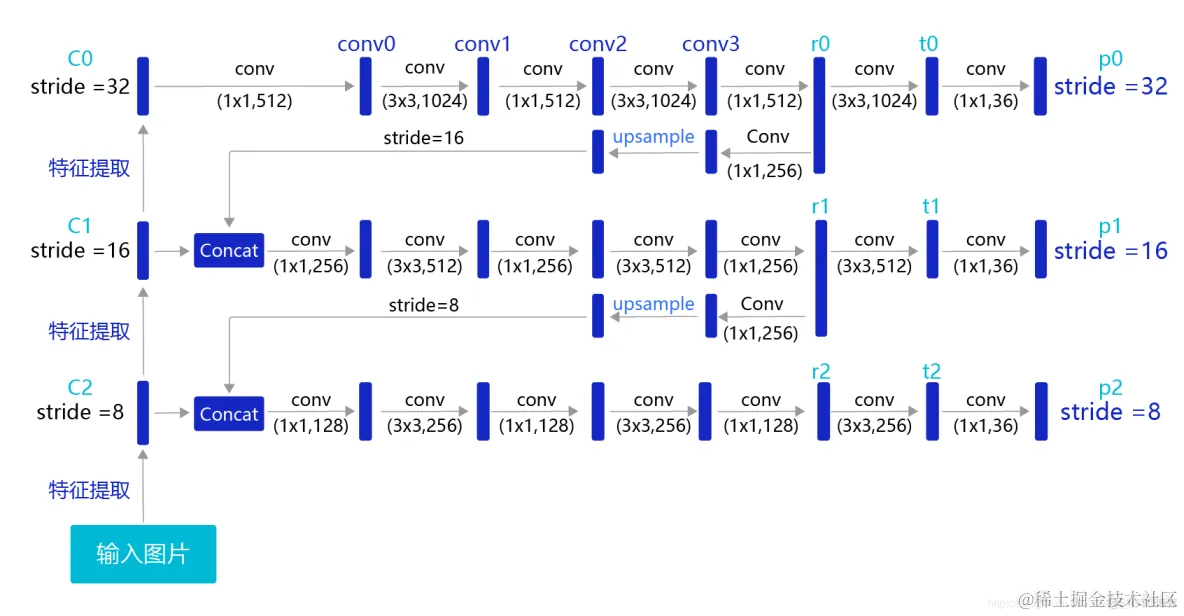
具体的网络实现方式如 图19 所示:

开启端到端训练
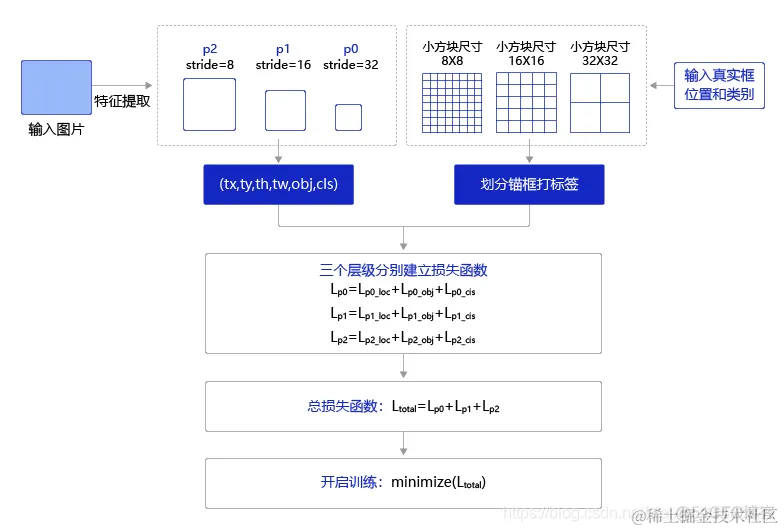
训练过程如 图20 所示,输入图片经过特征提取得到三个层级的输出特征图P0(stride=32)、P1(stride=16)和P2(stride=8),相应的分别使用不同大小的小方块区域去生成对应的锚框和预测框,并对这些锚框进行标注。
P0层级特征图,对应着使用32×32大小的小方块,在每个区域中心生成大小分别为[116,90], [156,198], [373,326]的三种锚框。
P1层级特征图,对应着使用16×16大小的小方块,在每个区域中心生成大小分别为[30,61], [62,45] [59,119]的三种锚框。
P2层级特征图,对应着使用8×8大小的小方块,在每个区域中心生成大小分别为[10,13], [16,30], [33,23]的三种锚框。
将三个层级的特征图与对应锚框之间的标签关联起来,并建立损失函数,总的损失函数等于三个层级的损失函数相加。通过极小化损失函数,可以开启端到端的训练过程。
**?预测**
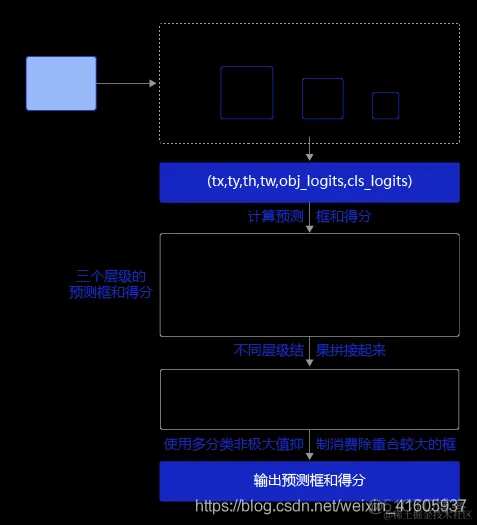
预测过程可以分为两步:
1.通过网络输出计算出预测框位置和所属类别的得分。
2.使用非极大值抑制来消除重叠较大的预测框。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 提升Hive效能:实用技巧与最佳实践
- 盘点那些有趣的开放API
- 玻璃生产ERP有什么品牌?哪家的玻璃生产ERP操作简单
- 简单Diff算法
- 记录--前端中 JS 发起的请求可以暂停吗
- java小项目:简单的收入明细记事本,超级简单(不涉及数据库,通过字符串来记录)
- 十四、W5100S/W5500+RP2040之MicroPython开发<MQTT&ThingSpeak示例>
- 多表查询练习
- sizeof运算符
- PHP的Laravel加一个小页面出现问题(whereRaw的用法)