(ros2)rviz2中显示机器人模型最小系统
发布时间:2024年01月03日
<launch>
<group>
<let name="robot_description" value="$(command 'xacro $(find-pkg-share gazebo_pkg)/urdf/total.xacro')"/>
<node pkg="robot_state_publisher" exec="robot_state_publisher">
<param name="robot_description" value="$(var robot_description)"/>
</node>
<node name="joint_state_publisher" exec="joint_state_publisher" pkg="joint_state_publisher"/>
<node pkg="rviz2" exec="rviz2"/>
</group>
</launch>?3个包一个都不能少
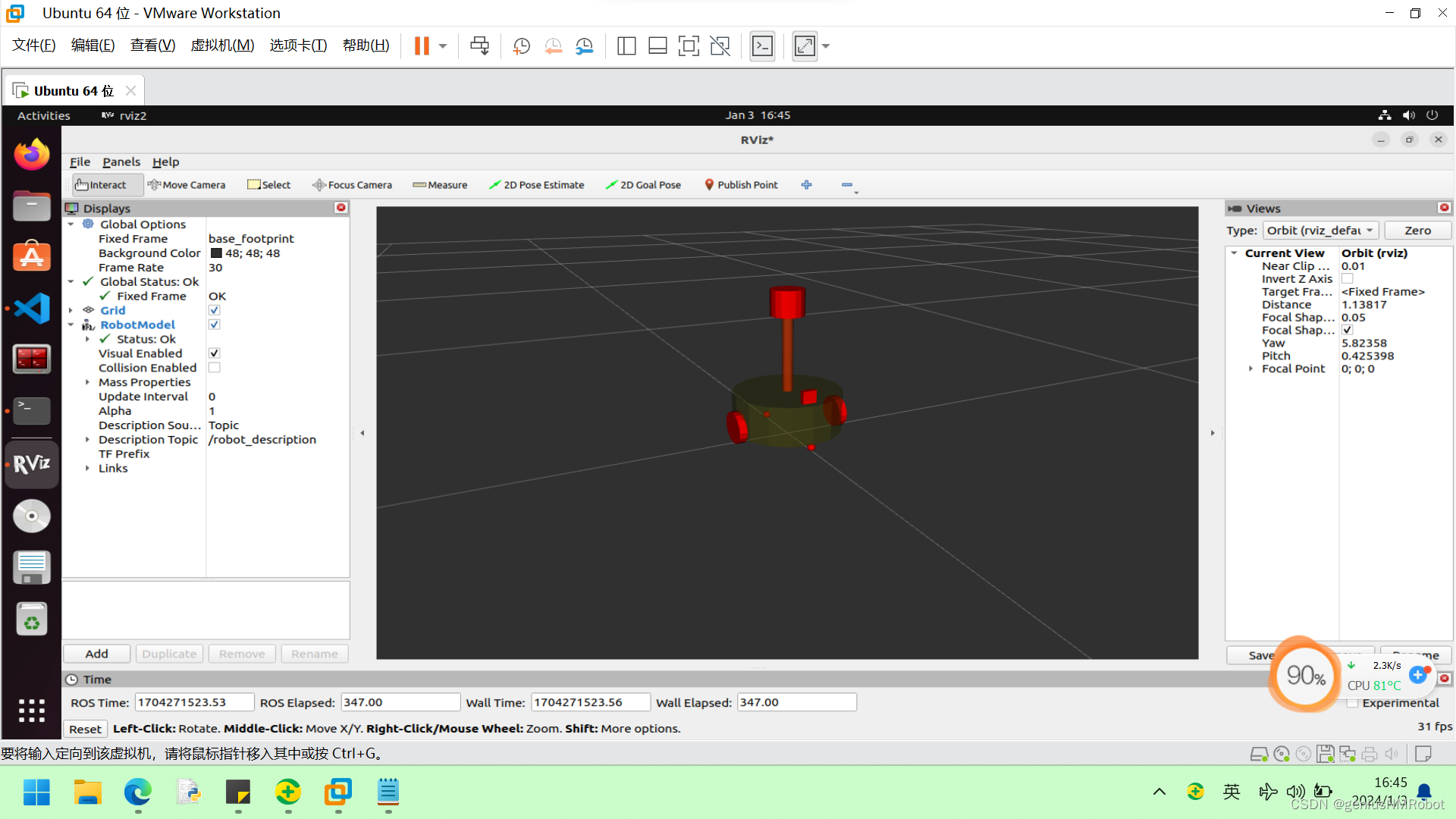

可以看到rviz订阅了/robot_description? ? ? ? 所以我们才需要param参数robot_description
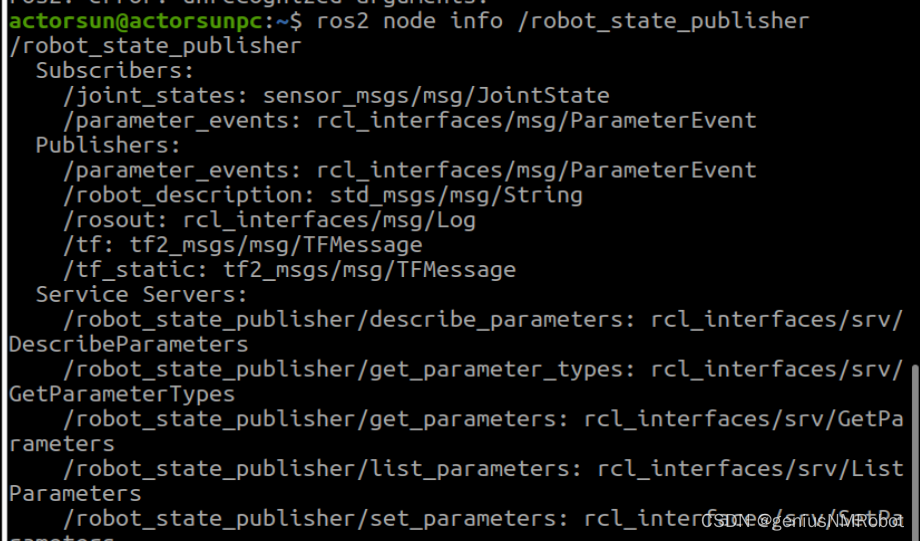
来看看是谁发布的/robot_description????????

?/joint_state_publisher订阅了/robot_state_publisher
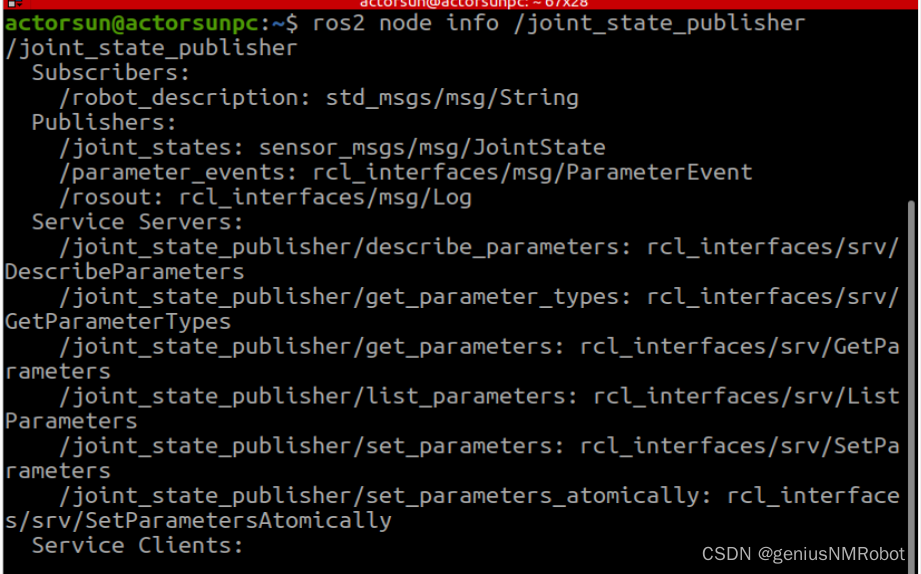
?/robot_state_publisher是发布了/robot_description,另外2个节点(rviz2和joint_state_publisher)订阅了这个节点
为什么没有/joint_state_publisher会无法正常显示轮子呢?
应该就是/joint_state_publisher还发布了/parameter_events,二rviz2订阅了这个吧。
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135367637
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 1.16 day3 IO网络编程
- WPS的JS宏实现WORD表格的首行以及整体格式设置
- 2024--Django平台开发-Django知识点(七)
- 响应式Web开发项目教程(HTML5+CSS3+Bootstrap)第2版 例4-4 label
- 自动化测试框架详解
- 网络故障问题一般性检查排查思路
- 【昕宝爸爸小模块】ConcurrentHashMap为什么不允许null值
- 为什么Lua在游戏开发中应用普遍?
- 379、仿真-基于51单片机的声控灯人体感应灯光照检测设计(程序+Proteus仿真+原理图+程序流程图+元器件清单+配套资料等)
- pip install 安装模块包位置及设置Anaconda为默认版本python