Linux多线程:线程池(单例),读写锁
目录
一、线程池(单例模式)
1.1 makefile
thread_pool:main.cc
g++ -o $@ $^ -std=c++11 -lpthread
.PHONY:clean
clean:
rm -f thread_pool
1.2 LockGuard.hpp
#include <pthread.h>
class Mtx
{
public:
Mtx(pthread_mutex_t* mtx)
:_mtx(mtx)
{}
~Mtx()
{}
void Lock()
{
pthread_mutex_lock(_mtx);
}
void Unlock()
{
pthread_mutex_unlock(_mtx);
}
private:
pthread_mutex_t* _mtx;
};
//RAII风格的锁
//创建这个对象就是上锁,析构这个对象就是解锁
class LockGuard
{
public:
LockGuard(pthread_mutex_t* mtx)
:_mtx(mtx)//单参数的构造函数支持隐式类型的转换
{
_mtx.Lock();
}
~LockGuard()
{
_mtx.Unlock();
}
private:
Mtx _mtx;
};
1.3 log.hpp
#pragma once
#include <iostream>
using namespace std;
#include <string>
#include <stdarg.h>
// 日志是有日志级别的
#define DEBUG 0
#define NORMAL 1
#define WARNING 2
#define ERROR 3
#define FATAL 4
#define LOGFILE "./threadpool.log"
const char* logLevel[]={"DEBUG","NORMAL","WARNING","ERROR","FATAL"};
//在写日志的时候需要互斥地写,即一条日志写完,另一条日志再写
pthread_mutex_t lock=PTHREAD_MUTEX_INITIALIZER;
//参数为一个日志等级和一个可变参数列表
void logMessage(int level,const char* format,...)
{
//日志的标准部分
char stdBuff[1024]={0};
//time_t是一个时间戳类型,time_t类型是long int经过typedef得到的
time_t timestamp=time(nullptr);
// struct tm {
// int tm_sec; /* seconds */
// int tm_min; /* minutes */
// int tm_hour; /* hours */
// int tm_mday; /* day of the month */
// int tm_mon; /* month */
// int tm_year; /* year */
// int tm_wday; /* day of the week */
// int tm_yday; /* day in the year */
// int tm_isdst; /* daylight saving time */
// };
//struct tm结构体可以通过man localtime函数查到
struct tm* t=localtime(×tamp);
int year=t->tm_year+1900;
int month=t->tm_mon+1;
int day=t->tm_mday;
int hour=t->tm_hour;
int minute=t->tm_min;
int second=t->tm_sec;
snprintf(stdBuff,sizeof(stdBuff),"[%s] [日志日期:%02d/%02d/%02d 时间:%02d:%02d:%02d]"
,logLevel[level],year,month,day,hour,minute,second);
//日志的自定义部分
char logBuff[1024]={0};
//处理可变参数的变量
va_list args;
//等于初始化可变参数变量,相当于把format指针赋值给args
va_start(args,format);
//把format可变参数列表中的参数一个一个地格式化到logBuff缓冲区中
vsnprintf(logBuff,sizeof(logBuff),format,args);
//置空
va_end(args);
//打印日志的时候需要保证串行打印,互不干扰的,所以需要加锁,
//向文件中打印日志
pthread_mutex_lock(&lock);
FILE* fp=fopen(LOGFILE,"a");
fprintf(fp,"%s%s",stdBuff,logBuff);
fclose(fp);
pthread_mutex_unlock(&lock);
// cout<<stdBuff<<logBuff;
}
1.4 Task.hpp
#pragma once
#include <cstdio>
typedef int(*callback_t)(int,int);
class Task
{
public:
Task()
{}
Task(int x,int y,char op,callback_t cb)
: _x(x)
, _y(y)
,_op(op)
,_cb(cb)
{}
void operator()()
{
printf("%d %c %d = %d\n",_x,_op,_y,_cb(_x,_y));
}
public:
int _x;
int _y;
char _op;
callback_t _cb;
};
1.5 Thread.hpp
#pragma once
#include <iostream>
using namespace std;
#include <pthread.h>
#include <string>
//Thread结构体里面要封装一个线程自己的执行函数,参数为
//void*,返回值也为void*
typedef void *(*func_t)(void *);
//线程结构体的数据,这个数据要作为参数传给线程执行的函数
class ThreadData
{
public:
ThreadData(int num,void* args)
: _num(num)
,_args(args)
{
_name = "thread-" + to_string(num);
}
public:
string _name;
int _num;
void* _args;//这个是线程池对象自己的this指针,在routinue函数中会具体解释
};
class Thread
{
public:
//构造函数,需要把线程的编号,线程的执行函数,以及线程池自己的this指针传过来
Thread(int num, func_t callback, void *args)
: _num(num),_func(callback), _args(args),_tdata(_num,_args)
{
}
//start才是真正地创建线程
void start()
{
pthread_create(&_tid, nullptr, _func, &_tdata);
}
//释放线程
void join()
{
pthread_join(_tid,nullptr);
}
pthread_t Tid()
{
return _tid;
}
private:
pthread_t _tid;//线程tid
int _num;//线程的代号
func_t _func;//线程的执行函数
void *_args;//this指针
ThreadData _tdata;//线程的数据
};
1.6 ThreadPool.hpp
#pragma once
#include <iostream>
using namespace std;
#include <vector>
#include "Thread.hpp"
#include <queue>
#include "LockGuard.hpp"
#include "log.hpp"
/*threadpool.h*/
/* 线程池:
* 一种线程使用模式。线程过多会带来调度开销,进而影响缓存局部性和整体性能。
而线程池维护着多个线程,等待着监督管理者分配可并发执行的任务。这避免了在
处理短时间任务时创建与销毁线程的代价。线程池不仅能够保证内核的充分利用,
还能防止过分调度。可用线程数量应该取决于可用的并发处理器、处理器内核、内存、
网络sockets等的数量。
* 线程池的应用场景:
* 1. 需要大量的线程来完成任务,且完成任务的时间比较短。 WEB服务器完成网页
请求这样的任务,使用线程池技术是非常合适的。因为单个任务小,而任务数量巨大,
你可以想象一个热门网站的点击次数。 但对于长时间的任务,比如一个Telnet连接请
求,线程池的优点就不明显了。因为Telnet会话时间比线程的创建时间大多了。
* 2. 对性能要求苛刻的应用,比如要求服务器迅速响应客户请求。
* 3. 接受突发性的大量请求,但不至于使服务器因此产生大量线程的应用。突发性大
量客户请求,在没有线程池情况下,将产生大量线程,虽然理论上大部分操作系统线程
数目最大值不是问题,短时间内产生大量线程可能使内存到达极限,出现错误.
* 线程池的种类:
* 线程池示例:
* 1. 创建固定数量线程池,循环从任务队列中获取任务对象,
* 2. 获取到任务对象后,执行任务对象中的任务接口
*/
static const int g_default_num = 3;
template <class T>
class ThreadPool
{
private:
// 获取锁
pthread_mutex_t *getMutex()
{
return &_taskQueue_mtx;
}
// 在条件变量下等待
void waitCond()
{
pthread_cond_wait(&_taskQueue_cond, &_taskQueue_mtx);
}
// 获取任务
T getTask()
{
T t = _task_queue.front();
_task_queue.pop();
return t;
}
public:
// 单例模式:懒汉模式
static ThreadPool<T> *getThreadPool(int num = g_default_num)
{
// 双判断加锁,外层判断是让第一次调用该函数的线程进入创建一个单例对象,
// 内层判断是防止第一次调用函数时有多个线程同时进入,从而导致创建多个
// 对象的情况。所以如果第一次调用该函数,就会有其中一个线程进入判断条件,
// 申请锁,然后创建对象,之后的每一次调用该函数都不会满足第一个判断条件,
// 即不会再申请锁
if (_thread_ptr == nullptr)
{
pthread_mutex_lock(&_thread_ptr_mtx);
if (_thread_ptr == nullptr)
{
_thread_ptr = new ThreadPool<T>(num);
}
pthread_mutex_unlock(&_thread_ptr_mtx);
}
return _thread_ptr;
}
// 线程池里面的线程就充当消费者的角色,不断地从任务队列中获取并处理任务。
// 这里必须加上static修饰,因为线程的函数的参数必须是一个void*的,而成员函数
// 内部是有一个this指针的,所以我们需要加上static
static void *routinue(void *args)
{
// 这个args就是线程结构体的数据,即ThreadData,ThreadData里面有一个最重要的参数
// 就是里面的args,而args就是该线程池ThreadPool的this指针,是在ThreadPool构造函数
// 创建一批Thread指针的时候传递过去的。为什么要花费这么大的精力把this指针传递到这个
// 函数中呢?因为该函数是静态的,我们没有办法在该函数中访问ThreadPool的任何成员函数
// 和成员变量,而我们作为消费者要消费数据就必须访问任务队列等成员函数,所以必须要能
// 访问成员变量和成员函数,所以就绕了一大圈把ThreadPool的this指针传过来,有了this指针
// 就能访问成员函数和成员变量了
ThreadData *td = static_cast<ThreadData *>(args);
ThreadPool<T> *tp = static_cast<ThreadPool<T> *>(td->_args);
// 获取并处理任务
T t;
while (true)
{
//获取任务前要先锁住任务队列,避免出现数据不一致问题
LockGuard lock(tp->getMutex());
//任务队列为空就让线程在条件变量下等待,注意这里要用while循环而不是
//if,因为可能存在伪唤醒,所以唤醒后必须再检查一遍,确认任务队列中有数据再取数据
while (_task_queue.empty())
{
tp->waitCond();
}
// 从任务队列中获取任务
t = tp->getTask();
printf("消费者 [%s:0x%x] 消费了一个数据:", td->_name.c_str(), pthread_self());
// logMessage(NORMAL, " 消费者 [%s:0x%x] 消费了一个数据:", td->_name.c_str(), pthread_self());
//调用仿函数处理任务
t();
}
}
//启动线程池才是真正调用iter->start()创建一堆线程
void run()
{
for (auto &iter : _threads)
{
iter->start();
logMessage(NORMAL, " 线程 [0x%x] 启动成功\n", iter->Tid());
}
}
//向任务队列中塞数据
void PushTask(const T &t)
{
//同理需要先加锁,因为任务队列是所有线程共享的
LockGuard lock(&_taskQueue_mtx);
_task_queue.push(t);
//当我们塞了一个数据进任务队列时证明任务队列中
//有数据了,此时可以唤醒一个线程来处理任务
pthread_cond_signal(&_taskQueue_cond);
}
private:
// 构造函数私有
ThreadPool(int num)
: _num(num)
{
for (int i = 0; i < num; i++)
{
_threads.push_back(new Thread(i + 1, routinue, this));
}
pthread_mutex_init(&_taskQueue_mtx, nullptr);
pthread_cond_init(&_taskQueue_cond, nullptr);
}
// 删除拷贝构造和复制重载函数
ThreadPool(const ThreadPool<T> &) = delete;
const ThreadPool<T> &operator=(const ThreadPool<T> &) = delete;
//析构函数
~ThreadPool()
{
for (auto &iter : _threads)
{
iter->join();
delete iter;
}
pthread_mutex_destroy(&_taskQueue_mtx);
pthread_cond_destroy(&_taskQueue_cond);
}
private:
static ThreadPool<T> *_thread_ptr;//线程池的指针
vector<Thread *> _threads; // 线程池
int _num;//线程池中的线程数
static queue<T> _task_queue;//任务队列
pthread_mutex_t _taskQueue_mtx;//任务队列的锁
pthread_cond_t _taskQueue_cond;//任务队列的条件变量
static pthread_mutex_t _thread_ptr_mtx;//获取线程池对象的锁,保证单例
};
//静态成语类外初始化
template <class T>
queue<T> ThreadPool<T>::_task_queue;
template <class T>
ThreadPool<T> *ThreadPool<T>::_thread_ptr = nullptr;
template <class T>
pthread_mutex_t ThreadPool<T>::_thread_ptr_mtx = PTHREAD_MUTEX_INITIALIZER;
1.7 main.cc
#include <iostream>
using namespace std;
#include "ThreadPool.hpp"
#include <unistd.h>
#include <ctime>
#include "Task.hpp"
// int main()
// {
// srand((unsigned int)time(nullptr));
// ThreadPool<int>* tp=new ThreadPool<int>(5);
// tp->run();
// while(true)
// {
// int x=rand()%100+1;
// //int y=rand()%100+1;
// // Task t(x,y,[](int x,int y)
// // {
// // return x+y;
// // });
// tp->PushTask(x);
// printf("生产者 [0x%x] 生产了一个数据:%d\n",pthread_self(),x);
// usleep(100000);
// }
// return 0;
// }
#include "log.hpp"
// 线程池的本质也是生产者消费者模型
char oper[] = "+-*/%";
int main()
{
srand((unsigned int)time(nullptr));
// 创建一个线程池
ThreadPool<Task> *tp = ThreadPool<Task>::getThreadPool();
// 启动线程池
tp->run();
while (true)
{
// 主线程充当一个生产者的角色,不断地生产任务数据
int x = rand() % 100 + 1;
int y = rand() % 100 + 1;
char op = oper[rand() % 5];
Task t;
switch (op)
{
case '+':
{
t = Task(x, y, '+', [](int x, int y)
{ return x + y; });
break;
}
case '-':
{
t = Task(x, y, '-', [](int x, int y)
{ return x - y; });
break;
}
case '*':
{
t = Task(x, y, '*', [](int x, int y)
{ return x * y; });
break;
}
case '/':
{
t = Task(x, y, '/', [](int x, int y)
{ return x / y; });
break;
}
case '%':
{
t = Task(x, y, '%', [](int x, int y)
{ return x % y; });
break;
}
}
// 向任务队列中塞数据
tp->PushTask(t);
// printf("生产者 [0x%x] 生产了一个数据:%d + %d = ?\n",pthread_self(),x,y);
// 打印日志
logMessage(NORMAL, " 生产者 [0x%x] 生产了一个数据:%d %c %d = ?\n", pthread_self(), x, op, y);
sleep(1);
}
return 0;
}
二、STL,智能指针和线程安全
2.1 STL中的容器是否是线程安全的?
不是。
原因是:STL 的设计初衷是将性能挖掘到极致, 而一旦涉及到加锁保证线程安全, 会对性能造成巨大的影响。而且对于不同的容器, 加锁方式的不同, 性能可能也不同(例如hash表的锁表和锁桶)。
因此 STL 默认不是线程安全. 如果需要在多线程环境下使用, 往往需要调用者自己保证线程安全。
2.2 智能指针是否是线程安全的?
对于 unique_ptr, 由于只是在当前代码块范围内生效, 因此不涉及线程安全问题。对于 shared_ptr, 多个对象需要共用一个引用计数变量, 所以会存在线程安全问题. 但是标准库实现的时候考虑到了这个问题, 基于原子操作(CAS)的方式保证 shared_ptr 能够高效, 原子的操作引用计数。
三、其他常见的各种锁
悲观锁:在每次取数据时,总是担心数据会被其他线程修改,所以会在取数据前先加锁(读锁,写锁,行锁等),当其他线程想要访问数据时,被阻塞挂起。
乐观锁:每次取数据时候,总是乐观的认为数据不会被其他线程修改,因此不上锁。但是在更新数据前,会判断其他数据在更新前有没有对数据进行修改。主要采用两种方式:版本号机制和CAS操作。
CAS操作:当需要更新数据时,判断当前内存值和之前取得的值是否相等。如果相等则用新值更新。若不等则失败,失败则重试,一般是一个自旋的过程,即不断重试。
自旋锁,公平锁,非公平锁?

四、读者写者问题
14.1 读写锁
在编写多线程的时候,有一种情况是十分常见的。那就是,有些公共数据修改的机会比较少。相比较改写,它们读的机会反而高的多。通常而言,在读的过程中,往往伴随着查找的操作,中间耗时很长。给这种代码段加锁,会极大地降低我们程序的效率。那么有没有一种方法,可以专门处理这种多读少写的情况呢? 有的,那就是读写锁。
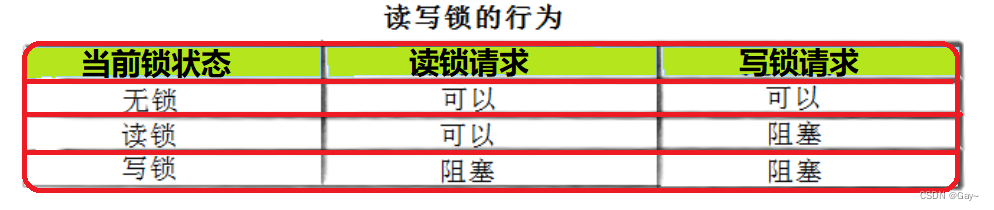
注意:写独占,读共享,读写同时来的时候,读锁优先级高,但是读者后来的话,可以是在他前面的写者优先级高的。
以上就是线程池的模拟实现的所有内容啦,你学会了吗?如果感觉到有所帮助的话,那就点点小心心,点点关注呗,后期还会持续更新Linux系统编程的相关知识哦,我们下期见!!!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- IEEE Trans模板参考文献中若相同作者的两篇文章放一起第二篇作者姓名不显示
- elementui-树形控件实现 两棵树的联动,两棵树有相同的id节点时节点的状态保持一致
- 【Python小课】Python环境搭建
- 外汇天眼:MT5到底比MT4强在哪里?
- mysql压力测试原因与mysql压力测试的方法
- imx6ull基于Linux 5.10.19移植OV2640驱动过程记录及问题解决
- anaconda prompt进入虚拟环境 打开spyder
- “UserWarning: The NumPy module was reloaded (imported a second time).”高效解决方案
- SIT1050ISO具有隔离功能,1Mbps,高速 CAN 总线收发器
- Linux--Shell脚本应用实战