基于多反应堆的高并发服务器【C/C++/Reactor】(中)在EventLoop的任务队列中添加新任务
发布时间:2024年01月02日
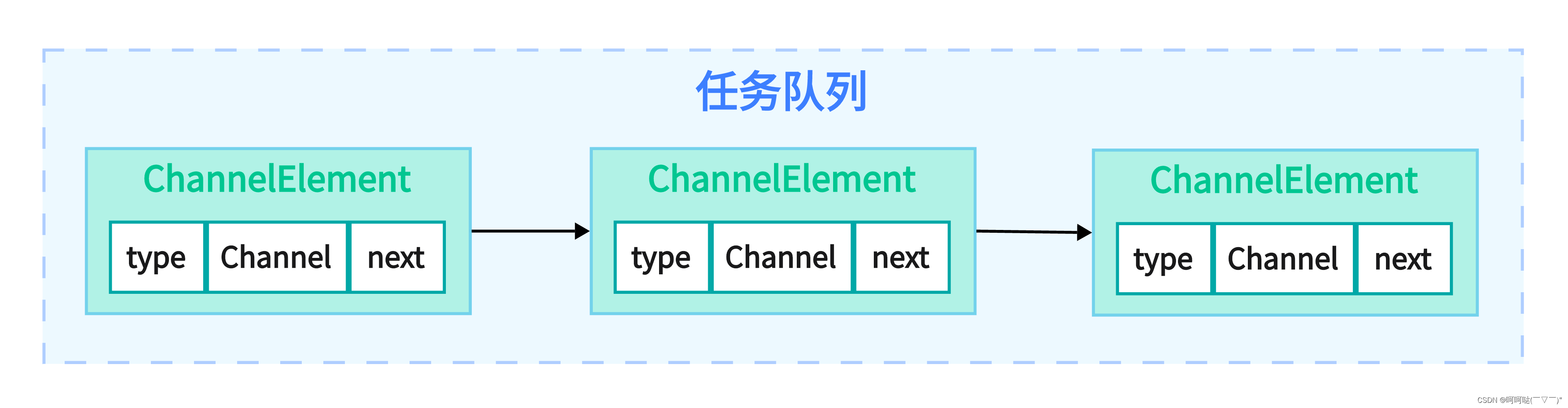
- 任务队列是一个链表,每个节点包含channel类型、文件描述符和操作类型。
- 在添加节点时,需要考虑线程同步,并确保节点被正确地添加到链表中。
- 节点的操作可以写到另一个函数中,以便于程序的维护。
- 在添加任务节点时,需要加互斥锁,因为有可能是当前线程或主线程进行添加操作。
本文主要介绍了在dispatcher中的处理流程,包括线程同步以及节点的添加和操作。其中,任务队列是一个链表,每个节点包含channel类型、文件描述符和操作类型。在添加节点时,需要考虑线程同步,并确保节点被正确地添加到链表中。
- EventLoop.h
// 添加任务到任务队列
int eventLoopAddTask(struct EventLoop* evLoop,struct Channel* channel,int type);- EventLoop.c
(1) 为什么在上面添加链表节点的时候需要加互斥锁?
- 因为有可能是当前线程去添加,也有可能是主线程去添加。
(2) 如果当前的线程是主线程,那么我们能够让主线程进行节点的处理吗?
- 肯定不能,因为你当前主线程它只能负责和客户端建立连接,如果这个连接建立好了,剩下的事情都是需要由这个子线程来完成的。所以主线程肯定不会给你去处理任务队列里边的节点。在主线程里边,其实它是有一个反应堆模型的,在当前的这个子线程里边也有一个反应堆模型。每个反应堆模型里边都有一个Dispatcher。关于这个Dispatcher就是epoll、poll、或者select模型,所以主线程去处理的话,这个任务就放到主线程的那个Dispatcher里边了,这样很显然是不对的。故在子线程的任务队列里边有了任务之后,还需要交给子线程的Dispatcher去处理。因此这个节点的处理,还需要判断当前线程到底是什么线程。
- 如果它是主线程不能让它去处理,如果是子线程,直接让它去处理。?
// 添加任务到任务队列
int eventLoopAddTask(struct EventLoop* evLoop,struct Channel* channel,int type) {
// 加锁,保护共享资源
pthread_mutex_lock(&evLoop->mutex);
// 创建新节点,后添加到任务队列中去
struct ChannelElement* node = (struct ChannelElement*)malloc(sizeof(struct ChannelElement));
node->channel = channel;
node->type = type;
node->next = NULL;
// 链表为空
if(evLoop->head == NULL) {
evLoop->head = evLoop->tail = node;
}else {
evLoop->tail->next = node; // 添加
evLoop->tail = node; // 后移
}
pthread_mutex_unlock(&evLoop->mutex);
// 处理节点
/**
* 这个描述假设了一个前提条件,就是当前的EventLoop反应堆属于子线程
* 细节:
* 1.对于链表节点的添加:可能是当前线程也可能是其他线程(主线程)
* 1).修改fd的事件,当前子线程发起,当前子线程处理
* 2).添加新的fd(意味着和一个新的客户端建立连接,这是由主线程做的,故添加任务节点这个操作肯定是由主线程做的),
* 添加任务节点的操作是由主线程发起的
* 2.不能让主线程处理任务队列里边的节点,需要由当前的子线程去处理
*/
if(evLoop->threadID == pthread_self()) {
// 当前子线程
(待续写)...
}else{
// 主线程 -- 告诉子线程处理任务队列中的任务
// 1.子线程在工作 2.子线程被阻塞了:select、poll、epoll
(待续写)...
}
return 0;
}一、任务队列与文件描述符
- 在dispatcher中,存在一个带检测的文件描述符集合。任务队列用于修改这个集合,例如添加、删除或修改。任务队列实际上是一个链表,每个节点代表一个channel元素。每个节点包含三个成员:channel类型、文件描述符和操作类型
二、任务队列的线程同步
- 由于任务队列可能被多个线程访问,因此在操作任务队列时需要进行线程同步。
- 这意味着在添加新节点到任务队列时,需要确保线程安全
三、节点的添加与操作
- 节点添加:当链表为空时,直接将新节点设置为任务队列的头;当链表不为空时,将新节点添加到链表的尾部(即tail节点的后边),并更新tail节点的next指针。
- 节点操作:将节点的处理操作移至另一个函数中,以便于程序的维护
四、线程角色与任务处理
- 主线程与子线程的角色:添加任务节点可能是当前线程或主线程的操作。
- 主线程负责与新客户端建立连接,而子线程处理其他任务。
- 主线程与子线程的任务分配:主线程不会处理任务队列中的节点,而是通知子线程去处理
五、总结
- 在dispatcher中的处理流程,包括任务队列用于修改一个带检测的文件描述符集合、线程同步以及节点的添加和操作。为了确保程序的稳定性和正确性,我们需要关注线程安全和任务分配,确保每个线程都能在其角色范围内高效地工作。?
文章来源:https://blog.csdn.net/weixin_41987016/article/details/135346492
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Gradio: 实时性能反馈的机器学习演示工具 | 开源日报 No.107
- Flutter开发之蓝牙链接传输数据
- 苹果显示连接iTunes是什么意思?你知道吗?答案来了!
- 零基础学习数学建模——(一)什么是数学建模
- 论文阅读笔记AI篇 —— Transformer模型理论+实战 (二)
- IP地址、子网掩码与网络地址
- 倒计时!24次会议6项重要修改,“贝莱德们”对比特币ETF做最后冲刺!
- 农学小作业(根据降雨量计算排灌水量)(旱地版)
- Word与Excel对应的Python 函数库
- CodeWave智能开发平台--03--目标:应用创建--04自定义主题样式5子页面页面跳转逻辑