使用TPL5010实现硬件看门狗功能
发布时间:2024年01月17日
概要
硬件看门狗实际上就是一个定时器,有一个输入和输出,它的功能是定期检查芯片内部的情况,一旦发生错误就向芯片发出重启信号。使用硬件看门狗,可以预防程序发生死循环。应用看门狗电路后单片机可以在无人状态下连续工作。硬件看门口电路,利用一个定时器来监控主程序的运行。
原理图
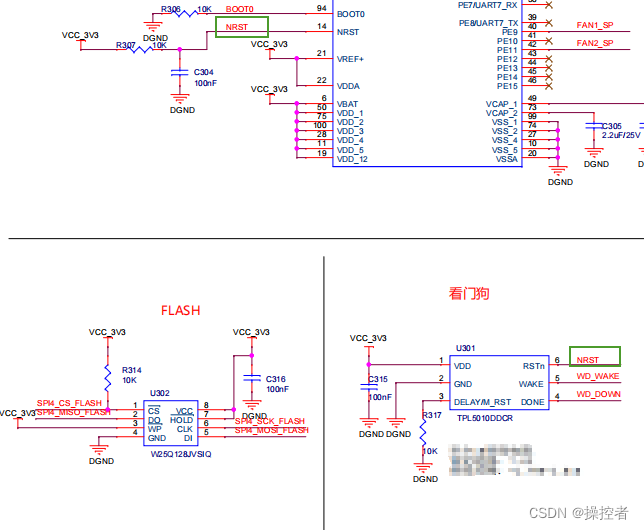
1.硬件看门狗原理图
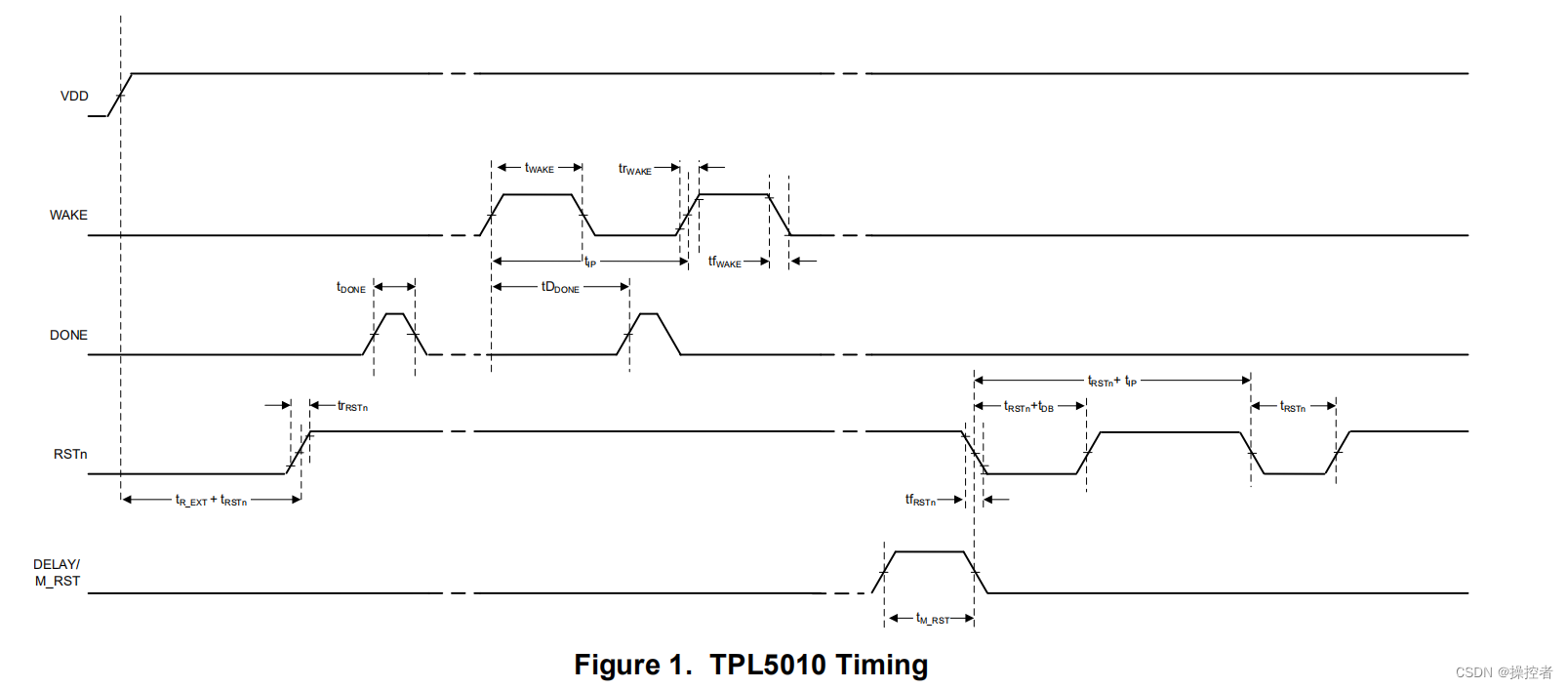
2.TPL5010时序图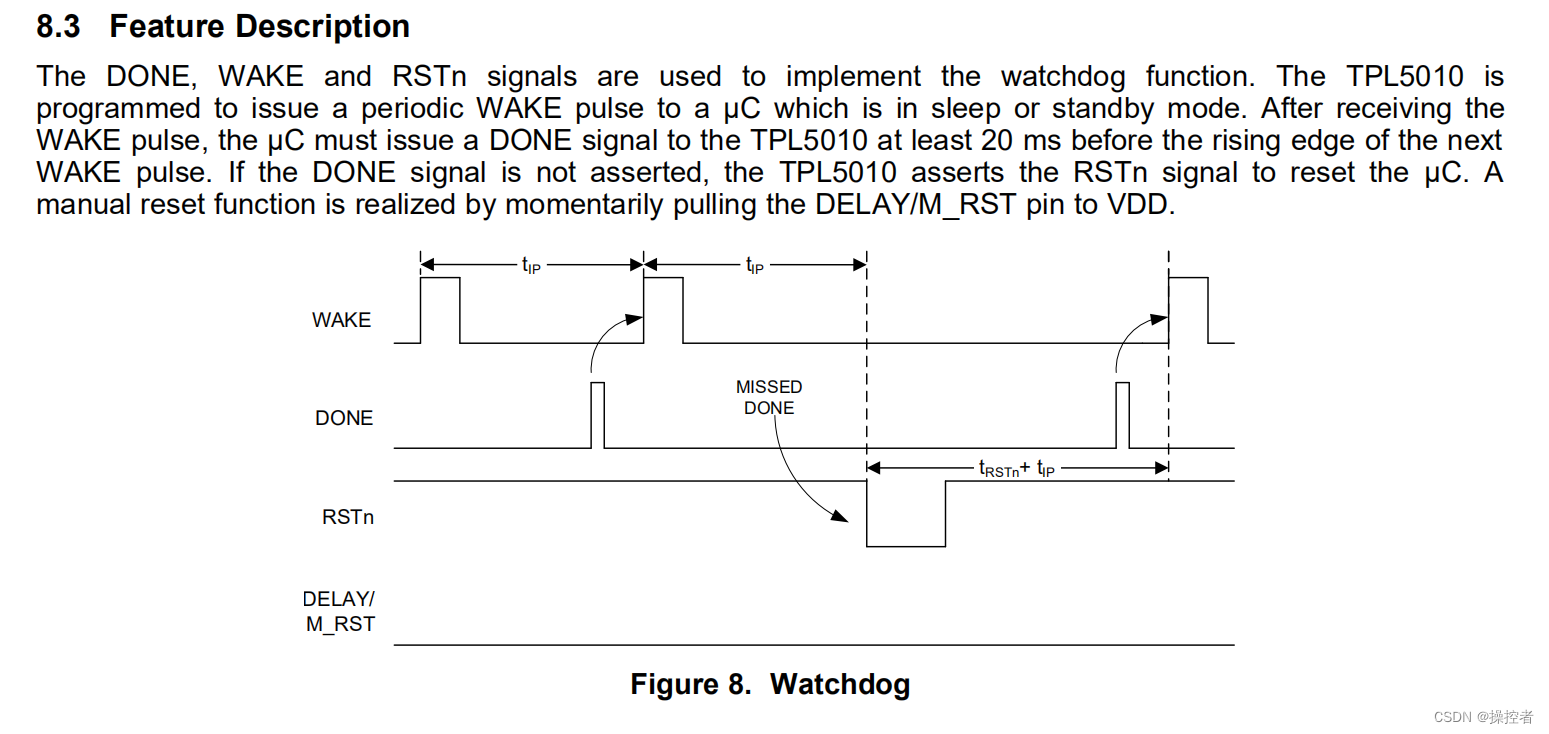
代码
///硬件看门狗初始化。需要将WAKE引脚设置为输入模式,DONE引脚设置输出模式
#define WD_DOWN_Pin GPIO_PIN_11
#define WD_DOWN_GPIO_Port GPIOD
#define WD_WAKE_Pin GPIO_PIN_12
#define WD_WAKE_GPIO_Port GPIOD
#define WD_DOWN_PIN_SET HAL_GPIO_WritePin(GPIOD, WD_DOWN_Pin, GPIO_PIN_SET)
#define WD_DOWN_PIN_RESET HAL_GPIO_WritePin(GPIOD, WD_DOWN_Pin, GPIO_PIN_RESET)
#define WD_DOWN_PIN HAL_GPIO_ReadPin(GPIOD, WD_WAKE_Pin)
static void rt_watchdog_thread_entry(void* parameter)
{
rt_thread_delay(50); //等待稳定下来
WD_DOWN_PIN_SET;
rt_thread_delay(1); //输出一个脉冲喂狗
WD_DOWN_PIN_RESET;
while(1)
{
if(WD_DOWN_PIN ==1) //拉升高电平持续时间是20ms左右
{
rt_thread_delay(50); //等待WAKE拉低电平
WD_DOWN_PIN_SET;
rt_thread_delay(1); //大于100ns高电平脉冲喂狗
WD_DOWN_PIN_RESET;
}
//app_comm_door_motor_tx_process();
rt_thread_delay(5); //间隔采样时间需要小于20ms
}
}
小结
主要根据TPL5010芯片手册的时序图,编写相应控制代码。
软件看门狗和硬件看门狗区别
TPL5010资料
https://download.csdn.net/download/weixin_43211055/88737506?spm=1001.2014.3001.5503
文章来源:https://blog.csdn.net/weixin_43211055/article/details/135567776
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- uni-app uni-app内置组件
- [Linux] Ubuntu install Miniconda
- 云服务器3M固定带宽速度快吗?够用吗
- QT5 CMake进行开发
- 关于C语言提高的一些总结
- 关于晶振回流焊工艺,你知道哪些呢!
- 分布式微服务springcloud+Eureka协同过滤购物商城系统设计与实现744jn
- Android中矩阵Matrix实现平移,旋转,缩放和翻转的用法详细介绍
- Java 4种引用的用途
- 淘宝API:连接消费者与商家的桥梁