stm32f103c8t6以中断方式进行串口通信
发布时间:2024年01月20日
一、串口引脚复用及收发过程
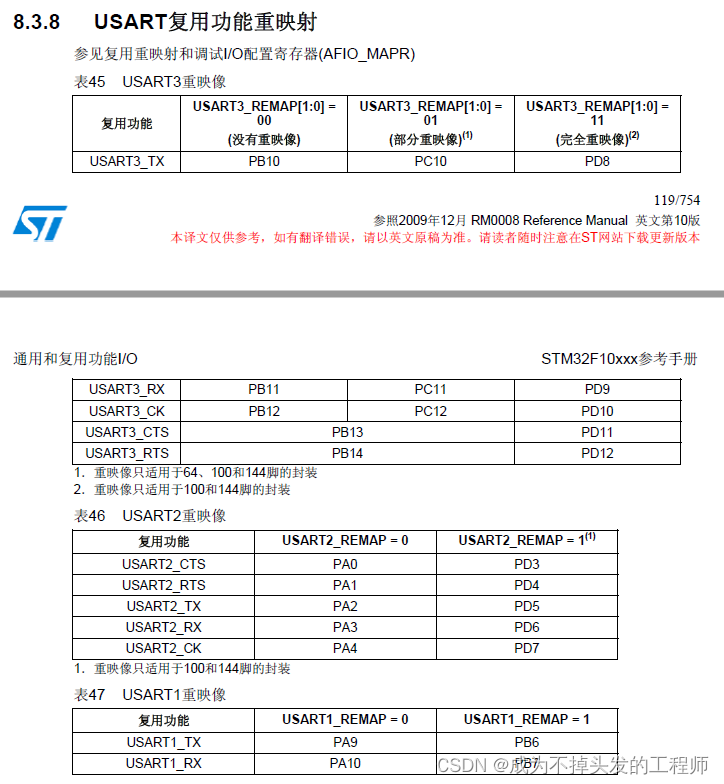
笔者此处使用USART1,JLink收发引脚对应接单片机上的PA9与PA10引脚。

二、串口配置过程

?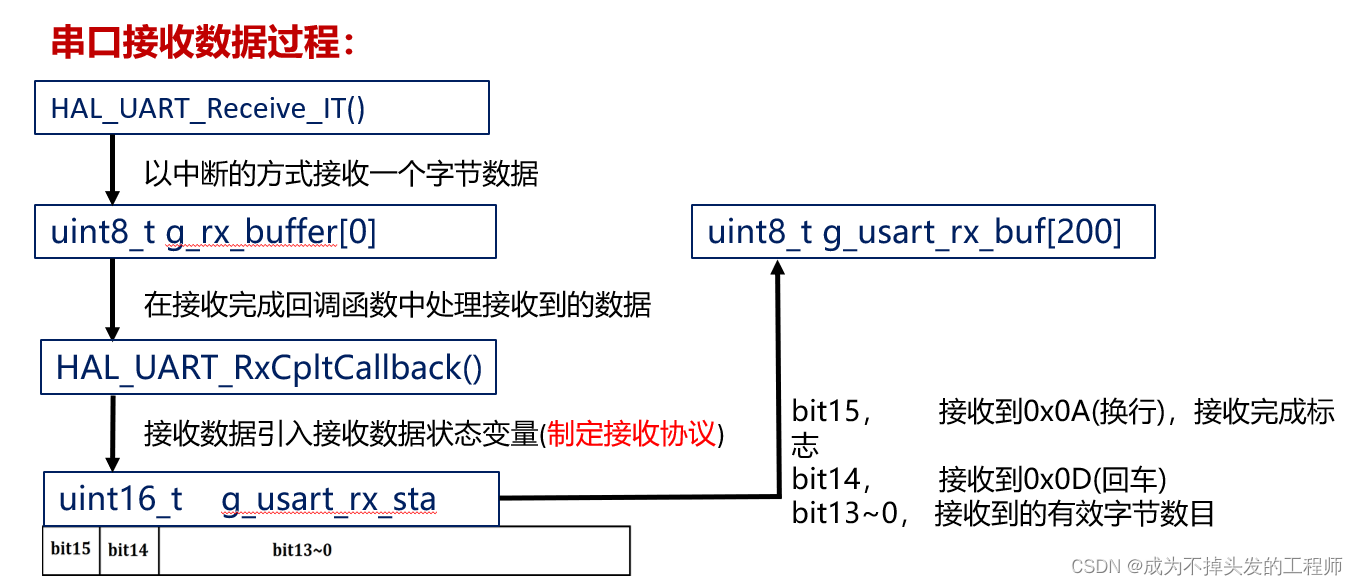

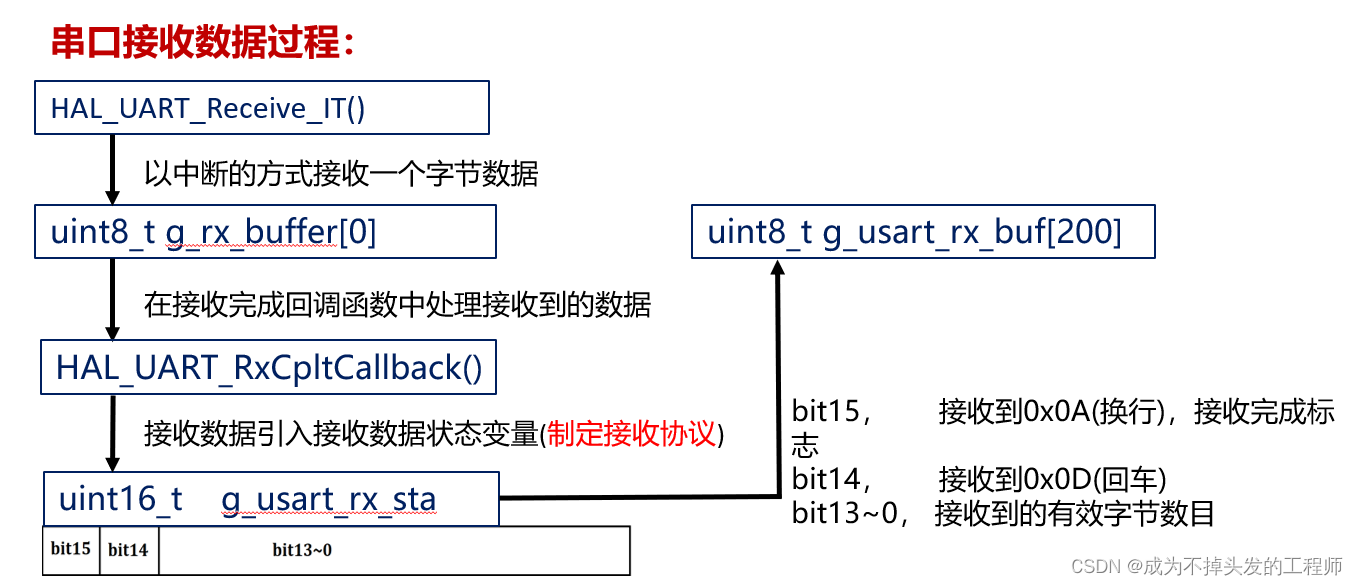
(来自正点原子)
串口通信过程:串口接收数据,先调用初始化程序(下述①②),运行中断函数③的?HAL_UART_IRQHandler(&g_uart1_handle);? 后会调用HAL库中断处理公用函数④对接收的数据进行处理;发送处理放在main函数中(下述⑤)。
①void usart_init(uint32_t baudrate)串口x初始化函数。
UART_HandleTypeDef g_uart1_handle;? /* UART句柄 */
/**
?* @brief?????? 串口X初始化函数
?* @param?????? baudrate: 波特率, 根据自己需要设置波特率值
?* @note??????? 注意: 必须设置正确的时钟源, 否则串口波特率就会设置异常.
?*????????????? 这里的USART的时钟源在sys_stm32_clock_init()函数中已经设置过了.
?* @retval????? 无
?*/
void usart_init(uint32_t baudrate)
{
??? /*UART 初始化设置*/
??? g_uart1_handle.Instance = USART_UX;?????????????????????????????????????? /* USART_UX */
??? g_uart1_handle.Init.BaudRate = baudrate;????????????????????????????????? /* 波特率 */
??? g_uart1_handle.Init.WordLength = UART_WORDLENGTH_8B;????????????????????? /* 字长为8位数据格式 */
??? g_uart1_handle.Init.StopBits = UART_STOPBITS_1;?????????????????????????? /* 一个停止位 */
??? g_uart1_handle.Init.Parity = UART_PARITY_NONE;??????????????????????????? /* 无奇偶校验位 */
??? g_uart1_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE;????????????????????? /* 无硬件流控 */
??? g_uart1_handle.Init.Mode = UART_MODE_TX_RX;?????????????????????????????? /* 收发模式 */
??? HAL_UART_Init(&g_uart1_handle);?????????????????????????????????????????? /* HAL_UART_Init()会使能UART1 */
??? /* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */
??? HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}②void HAL_UART_MspInit(UART_HandleTypeDef *huart)
/* (1)使能USART1和对应IO时钟,(2)初始化IO,(3)使能USART1中断,设置优先级 */
/**
?* @brief?????? UART底层初始化函数
?* @param?????? huart: UART句柄类型指针
?* @note??????? 此函数会被HAL_UART_Init()调用
?*????????????? 完成时钟使能,引脚配置,中断配置
?* @retval????? 无
?*/
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
??? GPIO_InitTypeDef gpio_init_struct;
??? if(huart->Instance == USART1)??????????????? /* 如果是串口1,进行串口1 MSP初始化 */
??? {
??????? USART_TX_GPIO_CLK_ENABLE();???????????????????????????? /* 使能串口TX脚时钟 */
??????? USART_RX_GPIO_CLK_ENABLE();???????????????????????????? /* 使能串口RX脚时钟 */
??????? USART_UX_CLK_ENABLE();????????????????????????????????? /* 使能串口时钟 */
??????? /* 等同于
??????? __HAL_RCC_GPIOA_CLK_ENABLE();
??????? __HAL_RCC_USART1_CLK_ENABLE();
??????? */
??????? gpio_init_struct.Pin = USART_TX_GPIO_PIN;?????? /* 串口发送引脚号 */
??????? gpio_init_struct.Mode = GPIO_MODE_AF_PP;??????? /* 推挽式复用输出 */
??????? gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;? /* 高速 */
??????? HAL_GPIO_Init(GPIOA, &gpio_init_struct);??????? /* 初始化引脚 */
???????
??????? gpio_init_struct.Pin = USART_RX_GPIO_PIN;?????? /* 串口RX脚 必须设置成输入模式 */
??????? gpio_init_struct.Pull = GPIO_PULLUP;??????????? /* 上拉 */
??????? gpio_init_struct.Mode = GPIO_MODE_AF_INPUT;???? /* 输入 */
??????? gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;? /* 高速 */
??????? HAL_GPIO_Init(GPIOA, &gpio_init_struct);??????? /* 初始化引脚 */
???????
??????? HAL_NVIC_SetPriority(USART1_IRQn, 3, 3);??????? /* 设置优先级 */
??????? HAL_NVIC_EnableIRQ(USART1_IRQn);??????????????? /* 使能串口中断 */
???????
??? }
}③void USART1_IRQHandler(void)
/**
* @brief 串口X中断服务函数
注意,读取USARTx->SR能避免莫名其妙的错误
* @param 无
* @retval 无
*/
void USART1_IRQHandler(void)
{
HAL_UART_IRQHandler(&g_uart1_handle); /* 调用HAL库中断处理公用函数 */
// HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE); /* 重新开启中断并接收数据 */
while (HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE) != HAL_OK) /* 重新开启中断并接收数据 */
{
/* 如果出错会卡死在这里 */
}
}④void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
/**
* @brief 串口数据接收回调函数
数据处理在这里进行
* @param huart:串口句柄
* @retval 无
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART_UX) /* 如果是串口1 */
{
if((g_usart_rx_sta & 0x8000) == 0) /* 接受未完成 */
{
if(g_usart_rx_sta & 0x4000) /* 接受到了0x0d(回车键ASCII码) */
{
if(g_rx_buffer[0] != 0x0a) /* 接收到的不是0x0a(换行键) */
{
g_usart_rx_sta = 0; /* 接收错误,重新开始 */
}
else
{
g_usart_rx_sta |= 0x8000; /* 接收完成 */
}
}
else /* 接收数据处理过程 */
{
if(g_rx_buffer[0] == 0x0d) /* 收到回车键 */
{
g_usart_rx_sta |= 0x4000; /* 回车标志为置1 */
}
else /* 未接收完成,一位一位放进g_usart_rx_buf,若超过缓存长度(同时还没收到0X0d即回车键),接收错误 */
{
g_usart_rx_buf[g_usart_rx_sta & 0x3FFF] = g_rx_buffer[0];
g_usart_rx_sta++; /* 接收到的数据数+1 */
if(g_usart_rx_sta > (USART_REC_LEN - 1)) /* 接收数据超过缓存长度 */
{
g_usart_rx_sta = 0; /* 接收失败 */
}
}
}
}
}
}
⑤Main.c函数
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
int main(void)
{
??? uint8_t len;
??? uint16_t times = 0;
???
??? HAL_Init();???????????????????????????????????????????? /* 初始化HAL库 */
??? sys_stm32_clock_init(RCC_PLL_MUL9);???????????????????? /* 设置时钟, 72Mhz */
??? delay_init(72);???????????????????????????????????????? /* 延时初始化 */
??? led_init();?
??? usart_init(115200);???????????????????????????????????? /* 初始化串口 */
??? printf("请输入字符:\r\n");
??? while(1)
??? {
??????? if(g_usart_rx_sta & 0x8000)???????????????????????? /* 接收到了数据 */
??????? {
??????????? len = g_usart_rx_sta & 0x3fff;????????????????? /* 得到此次接收到的数据长度 */
??????????? printf("数据长度为:%d",len);
??????????? printf("\r\n您发送的消息为:");
??????????? __HAL_UART_CLEAR_FLAG(&g_uart1_handle, UART_FLAG_TC);?????????????????????? /* 清楚TC标志位 */
??????????? HAL_UART_Transmit(&g_uart1_handle, (uint8_t *)g_usart_rx_buf, len, 1000);?????? /* 发送数据 */
??????????? while(__HAL_UART_GET_FLAG(&g_uart1_handle, UART_FLAG_TC) != 1);???????????? /* 等待发送成功,当TC=1时跳出while,表示发送完成 */
??????????? printf("\r\n打印成功\r\n");
???????????
??????????? g_usart_rx_sta = 0;
???????????????
??????? }
??????? else
??????? {
??????????? times++;
??????????? if(times % 5000 == 0)
??????????? {
??????????????? printf("\r\n串口实验\r\n");
??????????? }
??????????? if(times % 200 == 0) printf("请输入数据,以回车键结束\r\n");
??????????? if(times % 30 == 0) LED0(1);
??????????? delay_ms(10);
??????? }
??? }
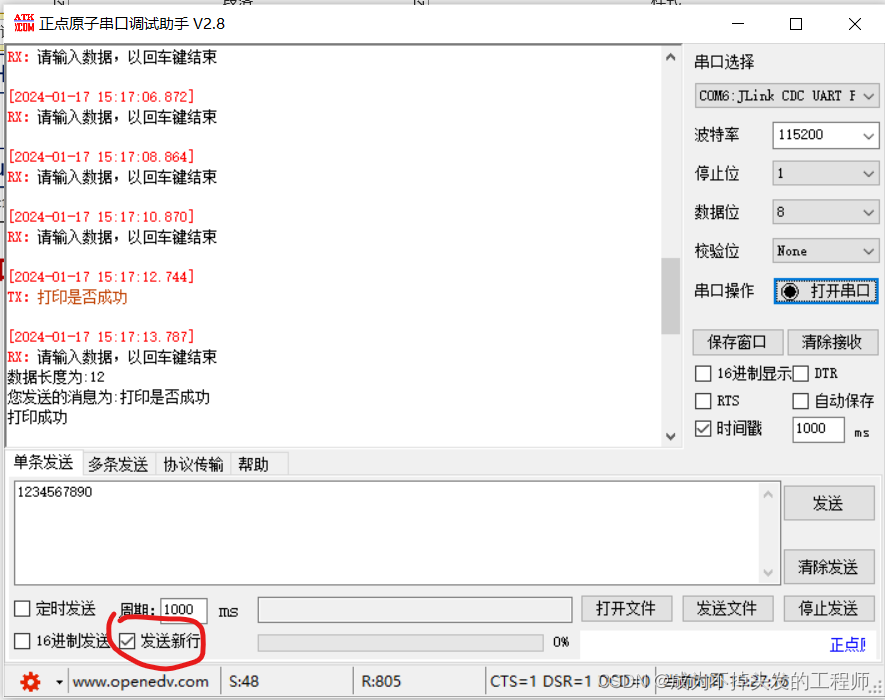
}现象及注意事项:回车换行判断,仅需在发送信息最后自行按一个回车键即可(或者像上述软件将【发送新行】?,软件将会自行添加)。
三、其他注意:
1、回车换行判断,仅需在发送信息最后自行按一个回车键即可(或者像上述软件将【发送新行】?,软件将会自行添加)。
2、stm32最小系统板无CH340故不可使用USB串口进行串口通信,笔者此处用的是JLink的串口进行通信。
3、printf在实现产品时基本不用,会导致单片机性能变差,一般仅在学习时使用。
文章来源:https://blog.csdn.net/weixin_57021249/article/details/135652475
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 高校社团管理系统
- MySQL中已经有了Binlog,为啥还要有Redo Log
- count(*)、count(1)、count(column)的区别
- 入职字节外包一个月,我离职了
- PHP序列化总结3--反序列化的简单利用及案例分析
- Android Studio下载gradle反复失败
- SG-9101CA 晶体振荡器可编程
- ebay会员收费吗,ebay会员活动的权益有哪些?-站斧浏览器
- 7-12 sdut-Collection-sort--C~K的班级(II)(java for PTA)
- Tg5032smn:高稳定性105℃高温