模糊数学在处理激光雷达的不确定性和模糊性问题中的应用
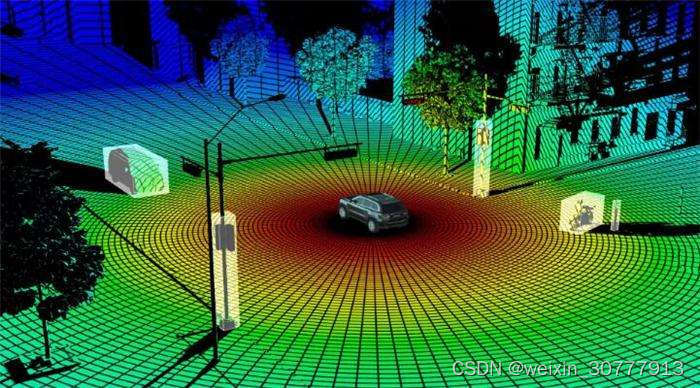
模糊数学是一种用于处理不确定性和模糊性问题的数学工具,它可以帮助我们更好地处理激光雷达数据中的不确定性和模糊性。激光雷达是一种常用的传感器,用于测量目标物体的距离、速度和方向等信息。然而,在实际应用中,激光雷达所获取的数据往往存在不确定性和模糊性问题,例如由于环境干扰或目标物体的形状复杂性,激光雷达可能无法准确地测量目标物体的位置或速度。通过使用模糊逻辑和模糊集合,我们可以更好地建模和处理激光雷达数据中的不确定性和模糊性,从而提高激光雷达在目标检测、跟踪、识别和分类等应用中的性能和鲁棒性。模糊数学在处理激光雷达问题中的应用主要在模糊逻辑和模糊集合两个方面。
激光雷达数据中的不确定性和模糊性可以通过模糊逻辑进行建模和处理。模糊逻辑是一种扩展了传统二值逻辑的数学工具,它允许变量具有模糊的真值,而不仅仅是真或假。通过使用模糊逻辑,我们可以更好地处理激光雷达数据中的模糊性,例如在目标检测和跟踪中,可以使用模糊逻辑来描述目标的模糊位置和模糊速度。
激光雷达数据中的不确定性和模糊性也可以通过模糊集合进行建模和处理。模糊集合是一种扩展了传统集合的数学工具,它允许元素具有模糊的隶属度,而不仅仅是属于或不属于。通过使用模糊集合,我们可以更好地描述激光雷达数据中的模糊性,例如在目标识别和分类中,可以使用模糊集合来描述目标的模糊形状和模糊特征。
在研究使用模糊逻辑和模糊集合处理激光雷达数据的不确定性和模糊性时,需要使用激光雷达、计算机硬件、数据采集卡、编程软件、传感器和实验平台。激光雷达用于收集目标的距离和反射率数据,是研究的核心设备之一。性能参数包括激光波长、测量范围、精度、分辨率等。计算机硬件用于运行数据处理和分析算法,以及模糊逻辑和模糊集合的建模和实现。数据采集卡用于将激光雷达的数据传输到计算机中进行处理。编程软件用于开发和实现模糊逻辑和模糊集合的算法,如MATLAB、Python等。可能需要其他传感器来补充激光雷达数据,例如摄像头、惯性测量单元(IMU)等。实验平台用于搭建实验环境,进行实际测试和验证。
模糊逻辑是一种基于模糊集合的推理方法,可以处理不确定性和模糊性。在激光雷达数据处理中,模糊逻辑可以用于建模和处理由于传感器噪声、环境变化、目标形状和姿态等因素导致的数据不确定性和模糊性。一些研究论文提出了使用模糊逻辑和模糊集合来处理激光雷达数据的方法,比如使用模糊逻辑来建模和处理激光雷达数据中的不确定性和模糊性,以提高目标检测的准确性和鲁棒性,以及使用模糊集合来表示激光雷达数据中的目标特征,以提高目标分类的准确性和鲁棒性,还有使用模糊推理来处理激光雷达数据中的不确定性和模糊性,以提高目标跟踪的准确性和鲁棒性。通过使用模糊逻辑和模糊集合来更好地建模和处理激光雷达数据中的不确定性和模糊性,从而提高激光雷达在目标检测、跟踪、识别和分类等应用中的性能和鲁棒性的相关论文有以下这些:
《A Fuzzy Logic Approach to LiDAR Data Processing for Object Detection and Tracking》:该论文提出了一种基于模糊逻辑的方法来处理激光雷达数据,以提高目标检测和跟踪的性能。该方法利用模糊集合来表示激光雷达数据中的不确定性和模糊性,并使用模糊推理来进行目标检测和跟踪。
《Fuzzy Logic for LiDAR Data Processing in Autonomous Vehicles》:该论文介绍了一种基于模糊逻辑的方法,用于处理激光雷达数据中的不确定性和模糊性,以提高自动驾驶车辆的性能。该方法使用模糊集合来表示激光雷达数据中的目标特征,并使用模糊推理来进行目标识别和分类。
《Using Fuzzy Logic and Fuzzy Sets for Robust LiDAR Data Processing》:该论文提出了一种基于模糊逻辑和模糊集合的方法,用于处理激光雷达数据中的不确定性和模糊性,以提高目标检测、跟踪和分类的鲁棒性。该方法利用模糊集合来表示激光雷达数据中的目标特征和环境信息,并使用模糊推理来进行目标检测、跟踪和分类。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- CSRF漏洞+附pikachu靶场详解
- JNA实现JAVA调用C/C++动态库
- 头条文章采集ChatGPT4.0改写软件环境配置教程步骤
- 龙蜥操作系统上安装MySQL:步骤详解与常见问题解决
- Canny边缘检测 双阈值检测理解
- 【UE Niagara学习笔记】04 - 火焰喷射时的黑烟效果
- Linux添加一个指令代替指定指令
- 鸿蒙开发第1篇__网络请求
- Redis面试题13
- 【深度学习:Recurrent Neural Networks】循环神经网络(RNN)的简要概述