操作系统大作业——基于OrangeOS的改写(3)
武汉大学21级网安操作系统大作业 任务三
?1. 问题介绍与思路摘要
?1.1 问题介绍
本任务是OS期末实验的第三个基本任务,主要目标是改造任务二的shell,使其能够在同一个shell中支持多任务执行。几点需要注意的地方如下:
? 注意现有内存管理可能不支持多程序支持
? 可执行程序的装入和内存定位问题需要仔细考虑
?1.2 思路摘要
在本次实验中,我们利用"&"符号分割输入的多条命令,拓展 kernel/main.c中的shabby_shell函数使其能够同时执行多条命令。核心思路如下:
? 创建二维字符串数组
char*?multi_argv[MAX_SHELL_PROC][MAX_SHELL_PROC_STACK]? 在argv中保存输入的所有字符串后,对argv进行扫描,把用&分割得到的命令分别保存在multi_argv中。
? 父进程借助for循环fork出所有的子进程,子进程被fork出来后主动将自己阻塞,等待父进程解除阻塞后,调用execv执行。?
同时我们需要注意,父进程利用for循环进行fork时,得到的子进程同样在该循环中,以及如果子进程抢占了父进程,则父进程可能无法完成fork出所有子进程的过程,导致无法同时运行多条指令。上述问题我们实验具体思路及实现中详细介绍并解决。?
2. 具体思路及其实现?
在本次实验中,我们需要对shell进行改造使之可以同时解析和执行多条命令。这一部分的实现原理较为简单,书本给出的原始代码已经在第十章实现了fork、exit、wait、exec等系统调用函数,并实现了一个简单的shell,也已经具备了将 command文件夹中的指令文件编译链接并装载入操作系统的能力。所以我们要扩展shell,只需要修改shell的函数即可。
任务三基于任务二的代码,shell的代码在kernel/main.c中,由Init()进程fork出来。要完成这部分的改造,我们首先需要了解原始shabby_shell函数、wait函数和execv函数。
?2.1 shabby_shell函数
?shell目前的功能很简单,只实现了读取命令并执行之(如果命令存在的话)。代码如下:
void?shabby_shell(const?char?*?tty_name)??
{??
????int?fd_stdin??=?open(tty_name,?O_RDWR);??
????assert(fd_stdin??==?0);??
????int?fd_stdout?=?open(tty_name,?O_RDWR);??
????assert(fd_stdout?==?1);??
??
????char?rdbuf[128];??
??
????while?(1)?{??
????????write(1,?"$?",?2);??
????????int?r?=?read(0,?rdbuf,?70);??
????????rdbuf[r]?=?0;??
??
????????int?argc?=?0;??
????????char?*?argv[PROC_ORIGIN_STACK];??
????????char?*?p?=?rdbuf;??
????????char?*?s;??
????????int?word?=?0;??
????????char?ch;??
????????do?{??
????????????ch?=?*p;??
????????????if?(*p?!=?'?'?&&?*p?!=?0?&&?!word)?{??
????????????????s?=?p;??
????????????????word?=?1;??
????????????}??
????????????if?((*p?==?'?'?||?*p?==?0)?&&?word)?{??
????????????????word?=?0;??
????????????????argv[argc++]?=?s;??
????????????????*p?=?0;??
????????????}??
????????????p++;??
????????}?while(ch);??
????????argv[argc]?=?0;??
??
????????int?fd?=?open(argv[0],?O_RDWR);??
????????if?(fd?==?-1)?{??
????????????if?(rdbuf[0])?{??
????????????????write(1,?"{",?1);??
????????????????write(1,?rdbuf,?r);??
????????????????write(1,?"}\n",?2);??
????????????}??
????????}??
????????else?{??
????????????close(fd);??
????????????int?pid?=?fork();??
????????????if?(pid?!=?0)?{?/*?parent?*/??
????????????????int?s;??
????????????????wait(&s);??
????????????}??
????????????else?{??/*?child?*/??
????????????????execv(argv[0],?argv);??
????????????}??
????????}??
????}??
??
????close(1);??
????close(0);??
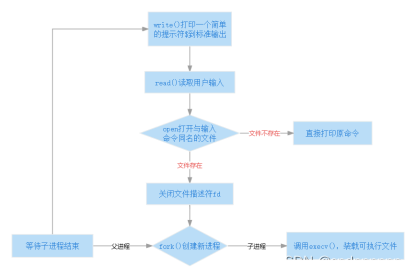
}??可以分析出,shabby_shell用write()打印一个简单的提示符 $ 到标准输出,之后用read()读取用户输入,然后用open尝试打开与输入命令同名的文件。如果文件存在,即fd!=-1,就认为这是一个可执行文件,然后关闭文件描述符fd,通过fork()创建一个新的进程,在父进程中,使用wait(&s)等待子进程完成;在子进程中,使用execv()执行用户输入的命令。如果文件不存在,就将输入的命令直接输出给用户。跟任务二中的流程图是一样的,这里再放一张:?
?
2.2 wait函数?& exit函数?
?在shabby_shell中有一个wait函数,而wait与exit是一对函数。exit()执行后杀死进程,wait()执行后挂起程序,与fork()相同,这两个函数工作时将会返回EXIT和WAIT消息给MM。在MM中,收到的消息分别由do_exit()和do_wait()来处理。
下面是wait.c中的wait()、exit.c中的exit()、与forkexit.c中的do_wait()和do_exit()的代码,之后我会将其结合起来理解。
PUBLIC?int?wait(int?*?status)??
{??
????MESSAGE?msg;??
????msg.type???=?WAIT;??
??
????send_recv(BOTH,?TASK_MM,?&msg);??
??
????*status?=?msg.STATUS;??
??
????return?(msg.PID?==?NO_TASK???-1?:?msg.PID);??
}??PUBLIC?void?exit(int?status)??
{??
????MESSAGE?msg;??
????msg.type????=?EXIT;??
????msg.STATUS??=?status;??
??
????send_recv(BOTH,?TASK_MM,?&msg);??
????assert(msg.type?==?SYSCALL_RET);??
}?PUBLIC?void?do_wait()??
{??
????int?pid?=?mm_msg.source;??
??
????int?i;??
????int?children?=?0;??
????struct?proc*?p_proc?=?proc_table;??
????for?(i?=?0;?i?<?NR_TASKS?+?NR_PROCS;?i++,p_proc++)?{??
????????if?(p_proc->p_parent?==?pid)?{??
????????????children++;??
????????????if?(p_proc->p_flags?&?HANGING)?{??
????????????????cleanup(p_proc);??
????????????????return;??
????????????}??
????????}??
????}??
??
????if?(children)?{??
????????/*?has?children,?but?no?child?is?HANGING?*/??
????????proc_table[pid].p_flags?|=?WAITING;??
????}??
????else?{??
????????/*?no?child?at?all?*/??
????????MESSAGE?msg;??
????????msg.type?=?SYSCALL_RET;??
????????msg.PID?=?NO_TASK;??
????????send_recv(SEND,?pid,?&msg);??
????}??
}??PUBLIC?void?do_exit(int?status)??
{??
????int?i;??
????int?pid?=?mm_msg.source;?/*?PID?of?caller?*/??
????int?parent_pid?=?proc_table[pid].p_parent;??
????struct?proc?*?p?=?&proc_table[pid];??
??
????/*?tell?FS,?see?fs_exit()?*/??
????MESSAGE?msg2fs;??
????msg2fs.type?=?EXIT;??
????msg2fs.PID?=?pid;??
????send_recv(BOTH,?TASK_FS,?&msg2fs);??
??
????free_mem(pid);??
??
????p->exit_status?=?status;??
??
????if?(proc_table[parent_pid].p_flags?&?WAITING)?{?/*?parent?is?waiting?*/??
????????proc_table[parent_pid].p_flags?&=?~WAITING;??
????????cleanup(&proc_table[pid]);??
????}??
????else?{?/*?parent?is?not?waiting?*/??
????????proc_table[pid].p_flags?|=?HANGING;??
????}??
??
????/*?if?the?proc?has?any?child,?make?INIT?the?new?parent?*/??
????for?(i?=?0;?i?<?NR_TASKS?+?NR_PROCS;?i++)?{??
????????if?(proc_table[i].p_parent?==?pid)?{?/*?is?a?child?*/??
????????????proc_table[i].p_parent?=?INIT;??
????????????if?((proc_table[INIT].p_flags?&?WAITING)?&&??
????????????????(proc_table[i].p_flags?&?HANGING))?{??
????????????????proc_table[INIT].p_flags?&=?~WAITING;??
????????????????cleanup(&proc_table[i]);??
????????????}??
????????}??
????}??
}??? exit()
这是用户空间的函数,由进程调用以结束自己。它发送一个包含退出状态的消息给内存管理任务(TASK_MM),告知系统进程希望退出。
? do_exit()
当内存管理任务接收到退出请求时,do_exit 函数被调用。它的主要工作包括:
??????????通知文件系统(为了可能的资源释放,如关闭打开的文件)
??????????释放该进程占用的内存
??????????设置进程的退出状态
??????????如果父进程正在等待(即处于 WAITING 状态),则清理退出进程的资源并发送信号给父进程;如果父进程不在等待,则设置该进程为 HANGING(即成为僵尸进程)。
??????????遍历进程表,将所有该进程的子进程的父进程设置为 INIT 进程,这样如果子进程退出,它们将被 INIT 进程清理。
???wait()
这个函数也在用户空间调用,通常由父进程调用以等待其子进程的退出。它向内存管理任务发送等待消息,并阻塞直到有子进程退出。
?? do_wait()
当内存管理任务收到等待请求时,do_wait 函数被调用。它检查是否有任何子进程已经退出(即处于 HANGING 状态):
??????????如果有,则清理这些子进程,并将它们的退出状态发送给父进程。
??????????如果没有,且该进程确实有子进程,则设置该进程为 WAITING 状态,等待其子进程退出。
??????????如果没有子进程,返回错误。
具体的,举个例子。?
假设进程P有子进程A。而A调用exit(),那么内存管理模块 (MM) 将会:?
1.告诉文件系统 (FS):A退出,请做相应处理。
2.释放A占用的内存。
3.判断P是否正在等待(WAITING):
????????(1)如果是:
??????????????????清除P的WAITING位;
??????????????????向P发送消息以解除阻塞(到此P的wait()函数结束);
??????????????????释放A的进程表项(到此A的exit()函数结束)。
????????(2)如果否:
??????????????????设置A的HANGING位。
4.遍历proc_table[],寻找A的子进程(如果有的话):
????????(1)将Init进程设置为A的子进程的父进程(换言之,将A的子进程过继给Init)。
????????(2)判断是否满足Init正在WAITING且A的子进程正在HANGING:
??????????????????如果是:
????????????????????????i.清除Init的WAITING位;
????????????????????????ii.向Init发送消息以解除阻塞(到此Init的wait()函数结束);
????????????????????????iii.释放A的子进程的进程表项(到此A的子进程的exit()函数结束)。
??????????????????如果否:
????????????????????????i.如果Init正在WAITING但A的子进程没有HANGING,那么“握手”会在将来A的子进程调用exit()时发生;
????????????????????????ii.如果A的子进程正在HANGING但Init没有WAITING,那么“握手”会在将来Init调用wait()时发生。
如果P调用wait(),那么MM将会:
1.遍历proc_table[],寻找P的子进程A:
????????(1)如果A正在HANGING,那么:
??????????????????向P发送消息以解除阻塞(到此P的wait()函数结束);
??????????????????释放A的进程表项(到此A的exit()函数结束)。
????????(2)如果A不在HANGING,那么:
??????????????????设P的WAITING位。
2.如果P没有子进程:
向P发送消息,消息携带一个表示出错的返回值(到此P的wait()函数结束)。
?2.3 execv函数
在shabby_shell中还有一个execv函数,而execv()所做的其实只是一件事,即向MM提供最终供调用exec的进程使用的堆栈。?
?下面是exec.c中的execv()和mm/do_exec()的代码。
PUBLIC?int?execv(const?char?*path,?char?*?argv[])??
{??
????char?**p?=?argv;??
????char?arg_stack[PROC_ORIGIN_STACK];??
????int?stack_len?=?0;??
??
????while(*p++)?{??
????????assert(stack_len?+?2?*?sizeof(char*)?<?PROC_ORIGIN_STACK);??
????????stack_len?+=?sizeof(char*);??
????}??
??
????*((int*)(&arg_stack[stack_len]))?=?0;??
????stack_len?+=?sizeof(char*);??
??
????char?**?q?=?(char**)arg_stack;??
????for?(p?=?argv;?*p?!=?0;?p++)?{??
????????*q++?=?&arg_stack[stack_len];??
??
????????assert(stack_len?+?strlen(*p)?+?1?<?PROC_ORIGIN_STACK);??
????????strcpy(&arg_stack[stack_len],?*p);??
????????stack_len?+=?strlen(*p);??
????????arg_stack[stack_len]?=?0;??
????????stack_len++;??
????}??
??
????MESSAGE?msg;??
????msg.type????=?EXEC;??
????msg.PATHNAME????=?(void*)path;??
????msg.NAME_LEN????=?strlen(path);??
????msg.BUF?????=?(void*)arg_stack;??
????msg.BUF_LEN?=?stack_len;??
??
????send_recv(BOTH,?TASK_MM,?&msg);??
????assert(msg.type?==?SYSCALL_RET);??
??
????return?msg.RETVAL;??
}??PUBLIC?int?do_exec()??
{??
????/*?get?parameters?from?the?message?*/??
????int?name_len?=?mm_msg.NAME_LEN;?/*?length?of?filename?*/??
????int?src?=?mm_msg.source;????/*?caller?proc?nr.?*/??
????assert(name_len?<?MAX_PATH);??
??
????char?pathname[MAX_PATH];??
????phys_copy((void*)va2la(TASK_MM,?pathname),??
??????????(void*)va2la(src,?mm_msg.PATHNAME),??
??????????name_len);??
????pathname[name_len]?=?0;?/*?terminate?the?string?*/??
??
????/*?get?the?file?size?*/??
????struct?stat?s;??
????int?ret?=?stat(pathname,?&s);??
????if?(ret?!=?0)?{??
????????printl("{MM}?MM::do_exec()::stat()?returns?error.?%s",?pathname);??
????????return?-1;??
????}??
??
????/*?read?the?file?*/??
????int?fd?=?open(pathname,?O_RDWR);??
????if?(fd?==?-1)??
????????return?-1;??
????assert(s.st_size?<?MMBUF_SIZE);??
????read(fd,?mmbuf,?s.st_size);??
????close(fd);??
??
????/*?overwrite?the?current?proc?image?with?the?new?one?*/??
????Elf32_Ehdr*?elf_hdr?=?(Elf32_Ehdr*)(mmbuf);??
????int?i;??
????for?(i?=?0;?i?<?elf_hdr->e_phnum;?i++)?{??
????????Elf32_Phdr*?prog_hdr?=?(Elf32_Phdr*)(mmbuf?+?elf_hdr->e_phoff?+??
????????????????????????(i?*?elf_hdr->e_phentsize));??
????????if?(prog_hdr->p_type?==?PT_LOAD)?{??
????????????assert(prog_hdr->p_vaddr?+?prog_hdr->p_memsz?<??
????????????????PROC_IMAGE_SIZE_DEFAULT);??
????????????phys_copy((void*)va2la(src,?(void*)prog_hdr->p_vaddr),??
??????????????????(void*)va2la(TASK_MM,??
?????????????????????????mmbuf?+?prog_hdr->p_offset),??
??????????????????prog_hdr->p_filesz);??
????????}??
????}??
??
????/*?setup?the?arg?stack?*/??
????int?orig_stack_len?=?mm_msg.BUF_LEN;??
????char?stackcopy[PROC_ORIGIN_STACK];??
????phys_copy((void*)va2la(TASK_MM,?stackcopy),??
??????????(void*)va2la(src,?mm_msg.BUF),??
??????????orig_stack_len);??
??
????u8?*?orig_stack?=?(u8*)(PROC_IMAGE_SIZE_DEFAULT?-?PROC_ORIGIN_STACK);??
??
????int?delta?=?(int)orig_stack?-?(int)mm_msg.BUF;??
??
????int?argc?=?0;??
????if?(orig_stack_len)?{???/*?has?args?*/??
????????char?**q?=?(char**)stackcopy;??
????????for?(;?*q?!=?0;?q++,argc++)??
????????????*q?+=?delta;??
????}??
??
????phys_copy((void*)va2la(src,?orig_stack),??
??????????(void*)va2la(TASK_MM,?stackcopy),??
??????????orig_stack_len);??
??
????proc_table[src].regs.ecx?=?argc;?/*?argc?*/??
????proc_table[src].regs.eax?=?(u32)orig_stack;?/*?argv?*/??
??
????/*?setup?eip?&?esp?*/??
????proc_table[src].regs.eip?=?elf_hdr->e_entry;?/*?@see?_start.asm?*/??
????proc_table[src].regs.esp?=?PROC_IMAGE_SIZE_DEFAULT?-?PROC_ORIGIN_STACK;??
??
????strcpy(proc_table[src].name,?pathname);??
??
????return?0;??
}?????execv()
execv接收两个参数:要执行的文件路径和一个字符串数组,其中包含传递给新程序的参数。在您的代码中,execv 通过以下步骤实现:
1.复制参数到一个栈 (arg_stack):
(1)argv中的每个字符串都被复制到一个临时的栈arg_stack中。
(2)每个字符串的指针(在arg_stack中的位置)也被存储在arg_stack中。
2.构造MESSAGE结构:
(1)这个结构用于与内存管理模块(MM)进行通信,告知它要执行新的程序。
(2)消息包含了程序路径、路径长度、参数栈的地址和参数栈的长度。
3.发送消息给MM:
(1)通过send_recv调用,将消息发送给MM任务。
(2)assert确保调用成功。
??do_exec()
它处理从execv发来的执行请求。步骤如下:
1.获取并验证程序路径:
从消息中复制程序路径,并检查路径的合法性。
2.获取程序文件的大小并读取内容:
(1)使用 stat 系统调用获取文件大小。
(2)读取文件内容到mmbuf,这是一个临时缓冲区。
3.解析 ELF 格式的可执行文件:
(1)ELF (Executable and Linkable Format) 是一种常见的二进制文件格式。
(2)解析ELF头部,加载程序段到目标进程的地址空间。
4.设置参数栈:
将参数从execv发送的消息中复制到目标进程的栈空间。
5.设置新的指令指针 (eip) 和栈指针 (esp):
这些寄存器被设置为新程序的入口点和新栈的顶部。
6.更改进程名:
进程表中的名称被更新为新程序的路径。
总之,execv函数负责准备执行新程序所需的所有信息,并将其发送给内存管理模块。MM任务接收这些信息,加载新程序到内存,并更新进程表以反映这些更改。
需要注意的是,execv将arg_stack[]的首地址以及其中有效内容的长度等通过消息发送给了MM。
2.4 修改shell支持多任务执行?
了解了上述基础知识后,我们就可以开始修改shell以实现支持多任务运行,我们采取的方法是令父进程fork出多个子进程,然后子进程去执行那些命令。?
?我们首先定义两个变量MAX_SHELL_PROC和MAX_SHELL_PROC_STACK,分别表示同时可执行的最多指令条数和一次输入的最大长度。
#define?MAX_SHELL_PROC?5?//最多指令条数?echo?pwd?ls?cat?cp?touch?rm???
#define?MAX_SHELL_PROC_STACK?128?//一次输入的最大长度shabby_shell函数代码的前半部分不做修改,和源码是一样的,我们用0标志一条命令的结束。我们用&指令分割不同命令后,argv数组的内容可能是这样的:?
argv?=?{test,?&,?ls,?&,?echo,?dp'os,?dp.txt,?&,?ls, &, cat, dp.txt}?利用 multi_argv 保存二维字符串数组,对命令进行处理后,它的内容可能是这样的:
multi_argv?=?{{test,?0},??
????????????{ls,?0},??
????????????{echo,?dp'os,?dp.txt,?0},??
????????????{ls,?0},??
????????????{cat,?dp.txt,?0}??
????????????}??定义int类型变量num_proc表示有多少个命令,sec_count的作用与上面argc的作用类似。定义字符串数组multi_argv。error标记命令是否出错,初始值赋为0。?
char*?multi_argv[MAX_SHELL_PROC][MAX_SHELL_PROC_STACK];??//multi_argv保存二维字符串数组??
????????int?num_proc?=?1;?//?表示有多少个命令??
????????int?sec_count?=?0;?//?和上面argc的作用类似??
????????int?error?=?0;?//?标记命令是否出错??接着使用for循环顺序扫描argv数组。如果argv[i]处遇到的不是&,则把字符串放入multi_argv[num_proc?- 1][sec_count++],否则,用0标记该命令结束,并将表示任务数量的变量num_proc加一,最后将sec_count重新置为0。?
?如果任务数量大于定义中的最大任务数MAX_SHELL_PROC,我们将error置为1。
int?i;??
for?(i?=?0;?i?<?argc;?i++)??
{??
????if?(strcmp(argv[i],"&"))??
????{??
????????multi_argv[num_proc?-?1][sec_count++]?=?argv[i];??
????}?else?{??
????????multi_argv[num_proc?-?1][sec_count]?=?0;??
????????num_proc++;??
????????sec_count?=?0;??
????????if?(num_proc?>?MAX_SHELL_PROC)??
????????{??
????????????error?=?1;??
????????????printf("Too?many?commands!\n");??
????????}?????
????}??
}??下面的代码只有在error为0,即没有错误时才会执行,出错则直接跳过。父进程fork出子进程后,父子进程均还在循环中,所以进行判断:如果当前进程是父进程,则执行wait(),是子进程,则调用execv执行。?
if?(!error)??
{??
????for?(i?=?0;?i?<?num_proc;?i++)??
????{??
????????int?fd?=?open(multi_argv[i][0],?O_RDWR);??
????????if?(fd?==?-1)?{??
????????????if?(rdbuf[0])?{??
????????????????write(1,?"{",?1);??
????????????????write(1,?rdbuf,?r);??
????????????????write(1,?"}\n",?2);??
????????????}??
????????}??
????????else?{??
????????????close(fd);??
????????????int?pid?=?fork();??
????????????if?(pid?!=?0)?{?/*?parent?*/??
????????????????int?s;??
????????????????wait(&s);??
????????????}??
????????????else?{??/*?child?*/??
????????????????execv(multi_argv[i][0],?multi_argv[i]);??
????????????}??
????????}??
????}??
}??至此对shell的一个最基本的改造就完成了。我们首先将这段新修改的代码放入kernel/main.c中,并编译连接,查看一下执行效果。?
?我们用之前在任务二中实现的算法指令进行测试,结果如下图。可以看到,改
造后的shell已经可以实现多任务的执行了。

?3. 本部分小结
?在本部分实验中,我们实现了对shell的改造,使它可以在同一个shell中支持多任务并行。我们首先对同时可执行的指令条数和一次输入的最大长度进行限制,然后修改源码中的shabby_shell函数,用"&"符号分割不同的指令,并定义multi_argv保存二维字符串数组。在for循环中顺序扫描argv数组对输入的指令字符串进行处理,然后父进程fork出所有的子进程以实现多任务的执行。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 51单片机8*8点阵屏
- 如何自动生成 API 接口文档 - 一份详细指南
- 异步IO(新)
- 177.【2023年华为OD机试真题(C卷)】素数之积(试除法和素数判断实现Java&Python&C++&&JS)
- Vue Echarts 3D饼图
- N-138基于springboot,vue在线教育平台
- 如何提高匹配的速度
- git的三种状态概念
- 基于java web的网上书城系统的设计与实现论文
- webpack详细教程