用BEVformer来卷自动驾驶-1
发布时间:2023年12月22日
之所以是-1,是因为大概率1篇文章写不完,但是又不知道应该用几篇来说事,先写着看
按照惯例,上论文地址:2203.17270v1.pdf (arxiv.org)
什么是BEV, Bird's -Eye-View的意思,就是鸟瞰
比如稍微传统一些的自动驾驶,大部分的实现。如果靠纯CV的方案的话,那么基本上不管你做什么下游任务,物体检测也好,还是分割图像也好,就看到你眼前这一块,或者说摄像头里这一块视野,然后分别对自己摄像头里的任务产生的结果做决策
鸟瞰就不一样了,让你能开上帝视角,参见特斯拉的那种行驶界面
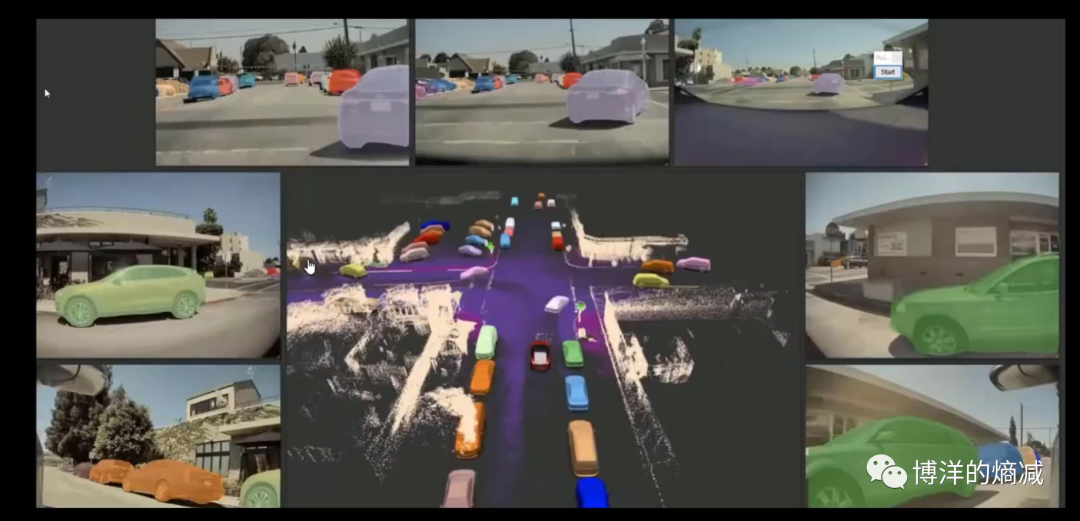
如上图所示,中间的图才配称得上是鸟瞰图,它可以感知周遭的一切环境,无死角的感知,进而来实现最合理的驾驶action(和高精地图的方案是不一样的,高精地图只有对主观路况的呈现,记得是主观路况的呈现,而不是感知,同时如果不配合雷达或者其他的方案是无法对同一物理时间的周遭其他对象进行感知的)
文章来源:https://blog.csdn.net/kingsoftcloud/article/details/135159643
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【OpenCV学习笔记05】- 鼠标作为画笔
- 阿里联合字节测试开发带你从0到1开发自动化测试框架
- 决策树回归(Decision Tree Regression)
- php 根据时间排序,接近的时间排在前面,过去的时间排在后面
- 从零开始使用Konva,画图并绑定节点。
- 一文讲透使用SPSS统计分析软件如何处理缺失值?
- 9.云原生存储之ceph在k8s中应用及问题处理
- MATLAB编程——基本运算
- 动态内存管理
- 信息安全和网络安全的区别