ROS第 8 课 编写简单的客户端 Client
发布时间:2024年01月18日
第 8 课 编写简单的客户端 Client
本节以创建简单的服务(Client)节点turtle_spawn.py为例进行讲解。该节点通过程序的形式发布一个让客户端产生一个新的小乌龟的请求。
1.配置客户端代码编译规则
- 输入指令“cd catkin_ws/src/beginner_hiwonder/scripts/”,回车。

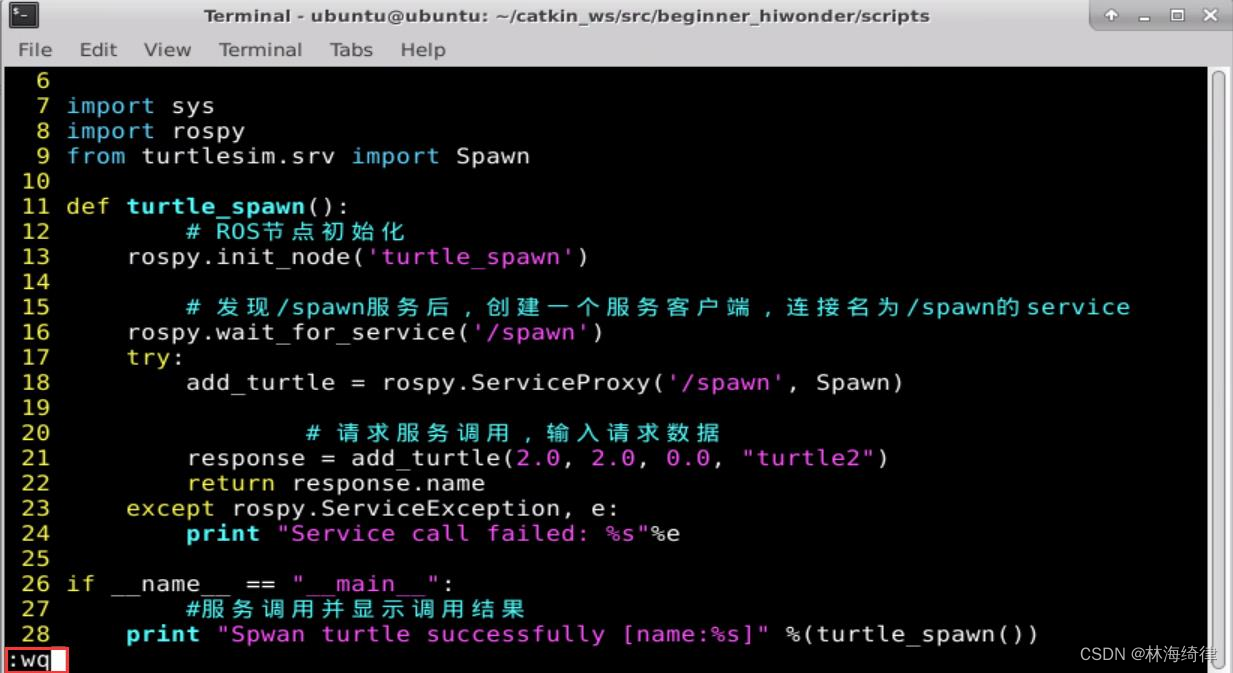
- 输入指令“vi turtle_spawn.py”编辑程序,复制下面程序。如需修改,再按下“i”即可修改。修改完成,按下“Esc”,输入“:wq”保存并退出。

#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 这个脚本用于请求turtlesim包提供的/spawn服务以创建新的海龟,服务的数据类型为turtlesim::Spawn
# 导入Python的sys模块,用于访问与Python解释器相关的变量和函数
import sys
# 导入ROS的python接口模块
import rospy
# 从turtlesim包的srv模块中导入Spawn服务
from turtlesim.srv import Spawn
# 定义一个函数用于生成(spawn)海龟
def turtle_spawn():
# 初始化ROS节点,节点名为'turtle_spawn'
rospy.init_node('turtle_spawn')
# 阻塞等待直到发现/spawn服务,才继续执行下去
rospy.wait_for_service('/spawn')
try:
# 创建一个ServiceProxy,作为/spawn服务的客户端,服务类型为Spawn
add_turtle = rospy.ServiceProxy('/spawn', Spawn)
# 请求服务调用,传入请求数据,这里是在坐标(2.0, 2.0)处,朝向为0.0弧度创建一个名为"turtle2"的海龟
response = add_turtle(2.0, 2.0, 0.0, "turtle2")
# 返回从服务中得到的响应,其中包括新海龟的名字
return response.name
except rospy.ServiceException as e: # 捕获异常,异常类型为服务异常
# 如果服务调用失败,打印错误信息
print "Service call failed: %s" % e
# 当该脚本被执行,而非被其他模块导入时
if __name__ == "__main__":
# 调用上面定义的函数请求生成海龟,并打印出生成的海龟名字
print "Spwan turtle successfully [name:%s]" % (turtle_spawn())
3) 输入指令“chmod +x turtle_spawn.py”回车,为保存的turtle_spawn.py赋予可执行权限

2.运行客户端
- 输入指令“roscore”,启动节点管理器。

若已开启,则会出现以下提示:

- 输入指令“rosrun turtlesim turtlesim_node”,回车,开启小乌龟。

此时,界面会弹出小乌龟运行窗口,如下图所示:
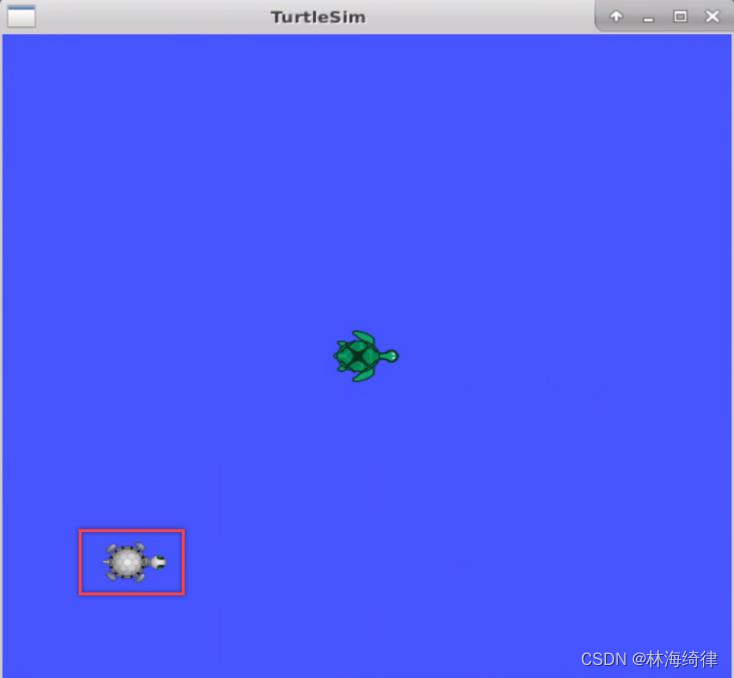
- 重新打开一个命令行终端,输入指令“rosrun beginner_hiwonder turtle_spawn.py”回车,运行客户端。

这时,客户端发送请求至服务端,并应答开启另一个小乌龟,如下图所示:
文章来源:https://blog.csdn.net/m0_73841621/article/details/135663951
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 力扣242 有效的字母异位词 Java版本
- Java缓冲字符流
- Selenium自动化测试-3.元素定位(1)
- C++ stack使用、模拟实现、OJ题
- 选择安全数据交换系统时 要考虑哪些因素?
- 渗透测试流程是什么?7个步骤给你讲清楚!
- SpringBoot统一返回和统一异常处理
- 目标检测YOLO实战应用案例100讲-基于视觉的道路交通环境感知(续)
- 网站在线客服系统推荐:提升客户体验与满意度
- Anders Hejlsberg在Build 2018大会上介绍TypeScript的演讲