ROS2机器人开发入门
ROS2学习
文章目录
ROS2对比ROS1的区别
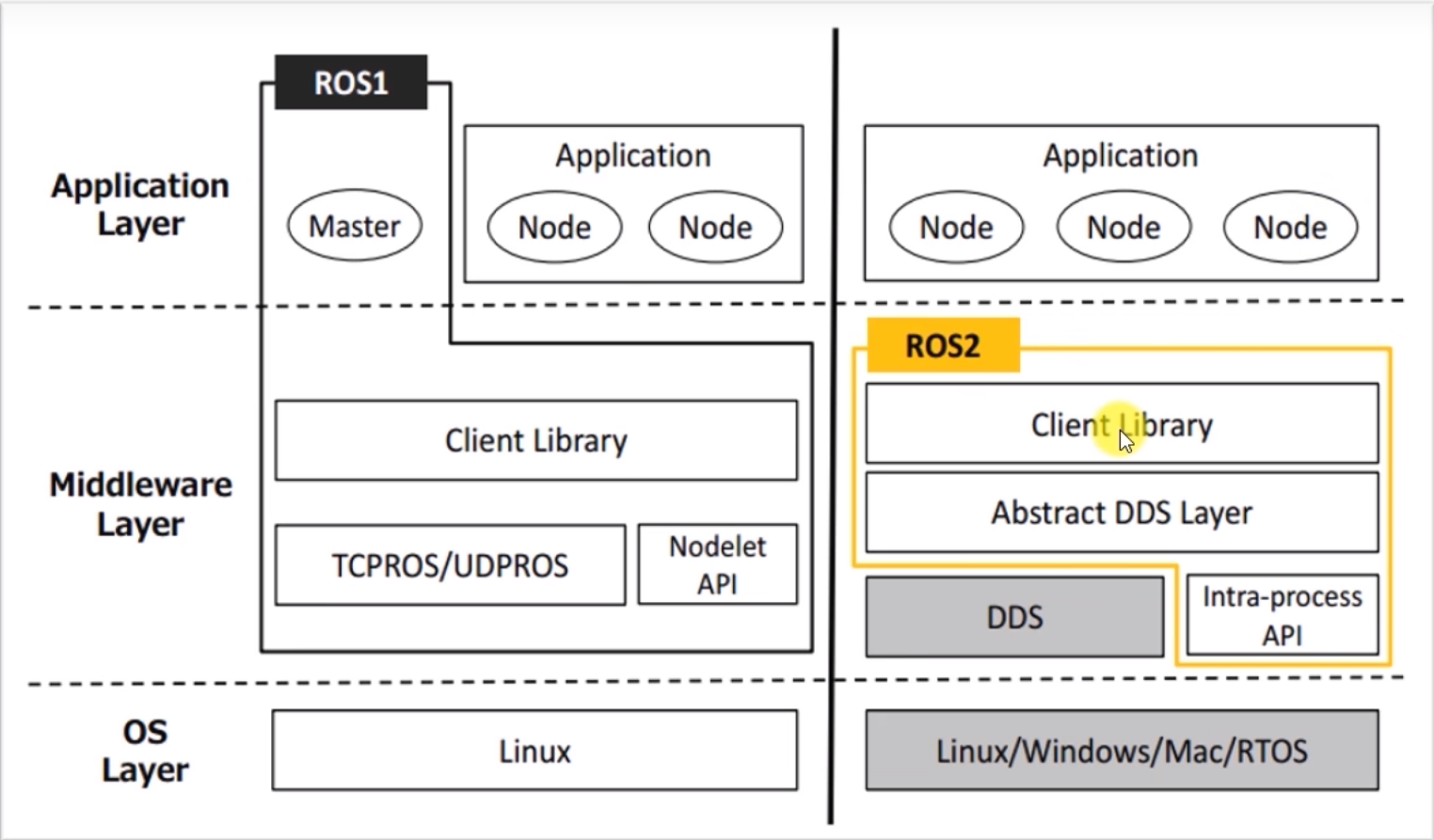
架构
- ROS1的架构下,所有节点需要使用Master进行管理
- ROS2使用基于DDS的Discovery机制
API
-
ROS1中的大部分代码都是基于2009年2月设计的API
-
ROS2重新设计了用户API,但使用方法类似
编译系统
- ROS1使用rosbuild、catkin管理项目
- ROS2使用升级版的ament、colcon
OS
- ROS1:Linux
- ROS2:Linux、Windows、MAC、RTOS
通讯
- ROS1:TCPROS/UDPROS
- ROS2:DDS
节点模型
- ROS1:publish/subscribe
- ROS2:discovery
进程
- ROS1:Nodelet
- ROS2:Intra-process
DDS是一种国际标准,常用于物联网系统,类似4G和5G
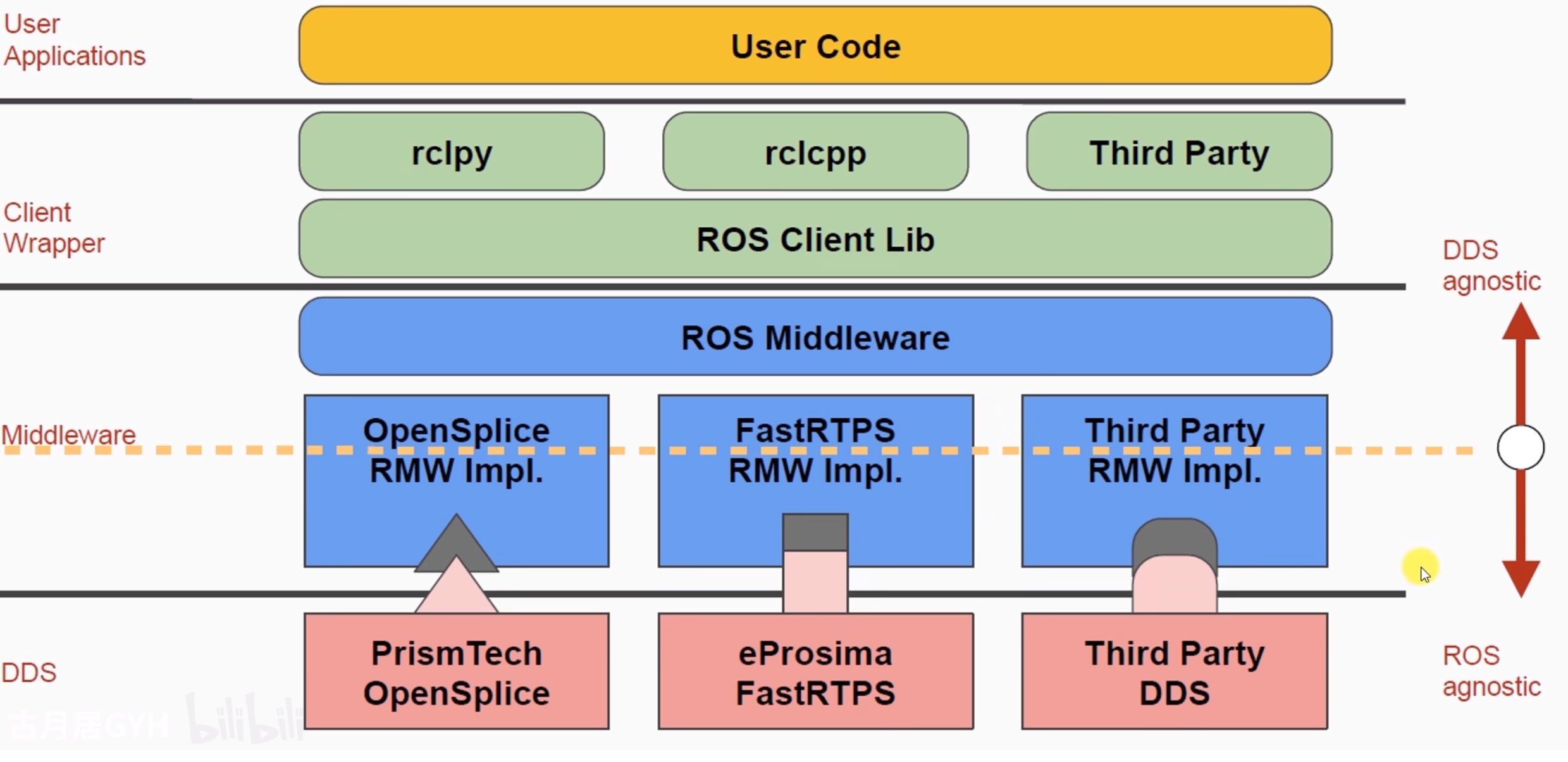
ROS Middleware是一种中间件,它制定了一种接口来规范例如发数据、收数据、配置数据属性,任何厂家需要接入ROS社区需要按照片这种标准来写一种适配接口
ROS2中的核心概念与ROS1类似

安装命令
# 设置编码
sudo apt update&&sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
# 添加源
sudo apt update && sudo apt install curl gnupg lsb-release
# 配置密钥
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o/usr/share/keyrings/ros-archive-keyring.gpg
# 配置ROS软件源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
# 正式安装ROS2
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
# 设置环境变量
:WQ /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
# 安装ROS2软件包
sudo apt update
sudo apt install ros-humble-ros1-bridge
sudo apt install ros-humble-****
ros2 run (ROS2)==rosrun(ROS1)
ros2 node + enter查看命令的用法
ros2 node info 节点 查看某一节点的详细信息
ROS工作空间(workspace):存放项目开发相关的文件夹是开发过程的大本营
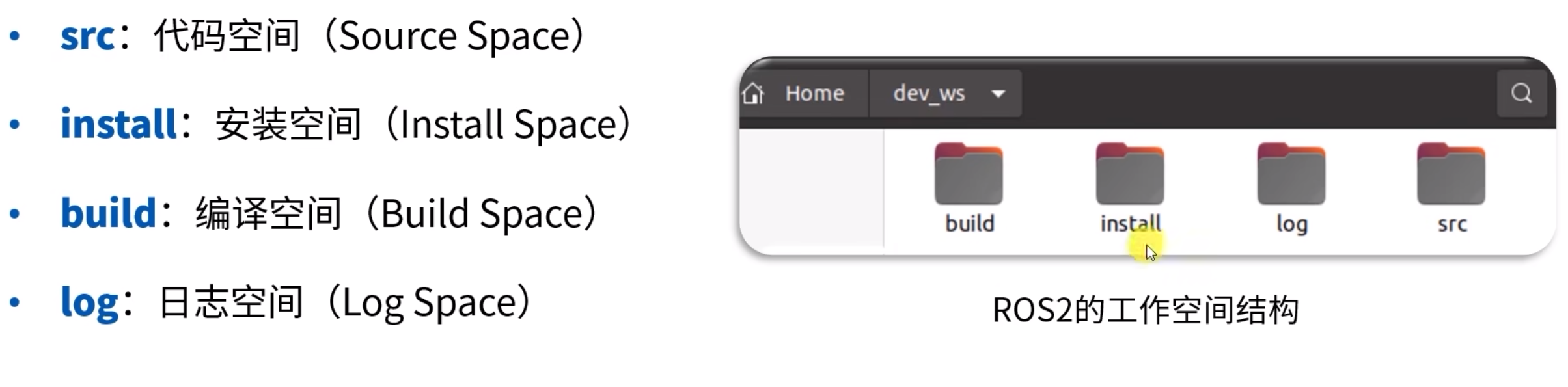
# 创建工作空间
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://gitee.com/guyuehome/ros2_21_tutorials.git
# 安装依赖
sudo apt install -y python3-pip
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
cd ..
rosdepc install -i --from-path src --rosdistro humble -y
# 编译工作空间
sudo apt install python3-colcon-ros # 安装编译器
cd ~/dev_ws/
colcon build
编译完成后为了让系统能找到功能包和可执行文件,需要设置环境变量
$ source install/local_setup.sh # 仅在当前终端生效
$ echo " source ~/dev_ws/install/local_setup.sh" >> ~/.bashrc # 所有终端均生效
创建功能包
支持C++11 和Python3.8
cd ~/dev_ws/src
ros2 pkg create --build-type ament_cmake learning_pkg_c #C++
ros2 pkg create --build-type ament_python learning_pkg_python # Python
C++功能包
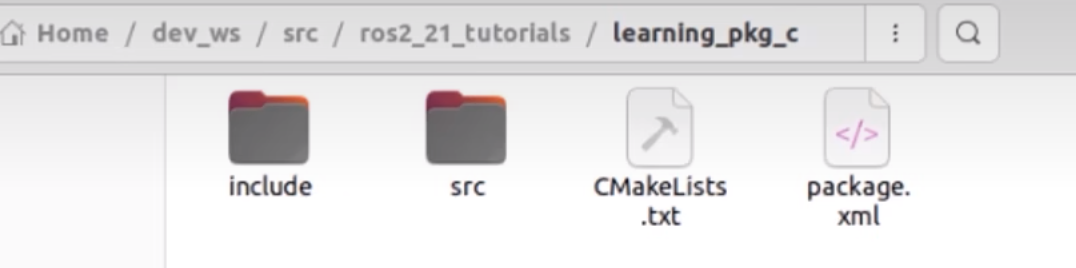
package.xml描述了功能包的基本信息,例如,名字,版本号,功能,维护者,许可证
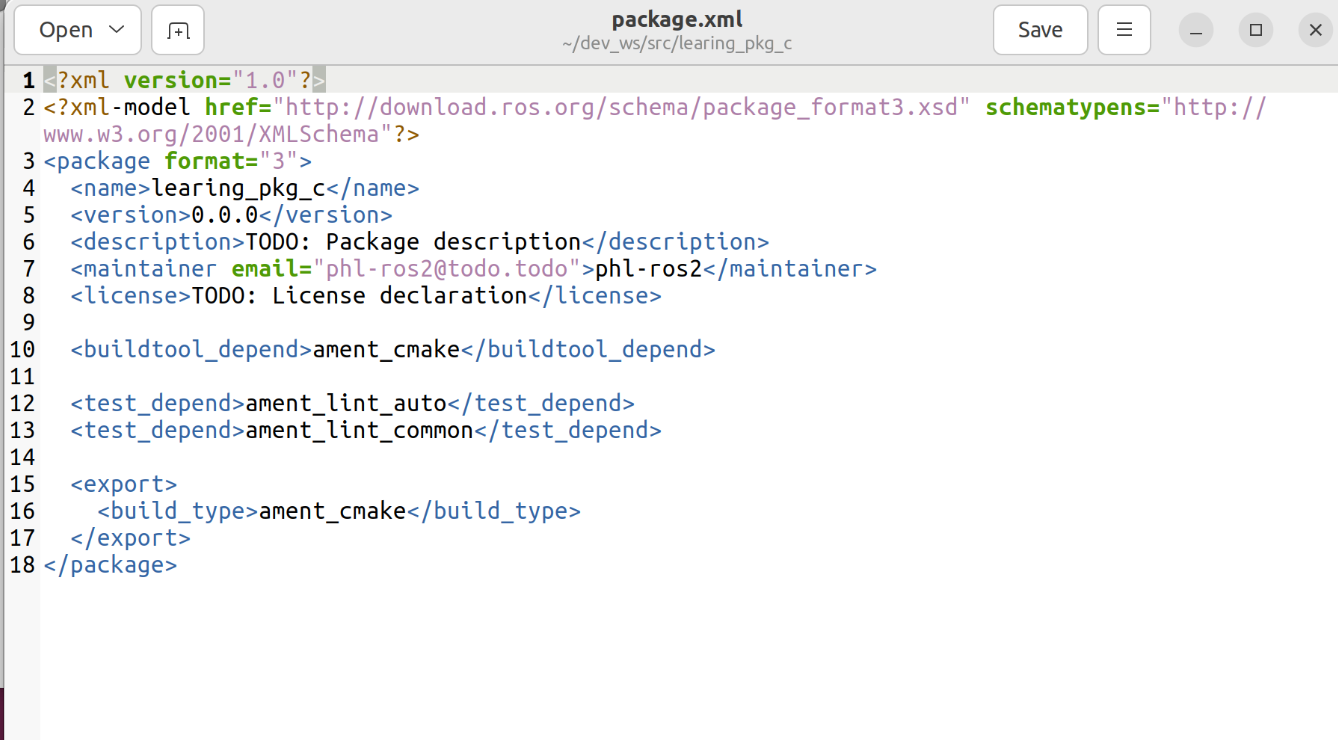
描述该功能包会有哪些依赖
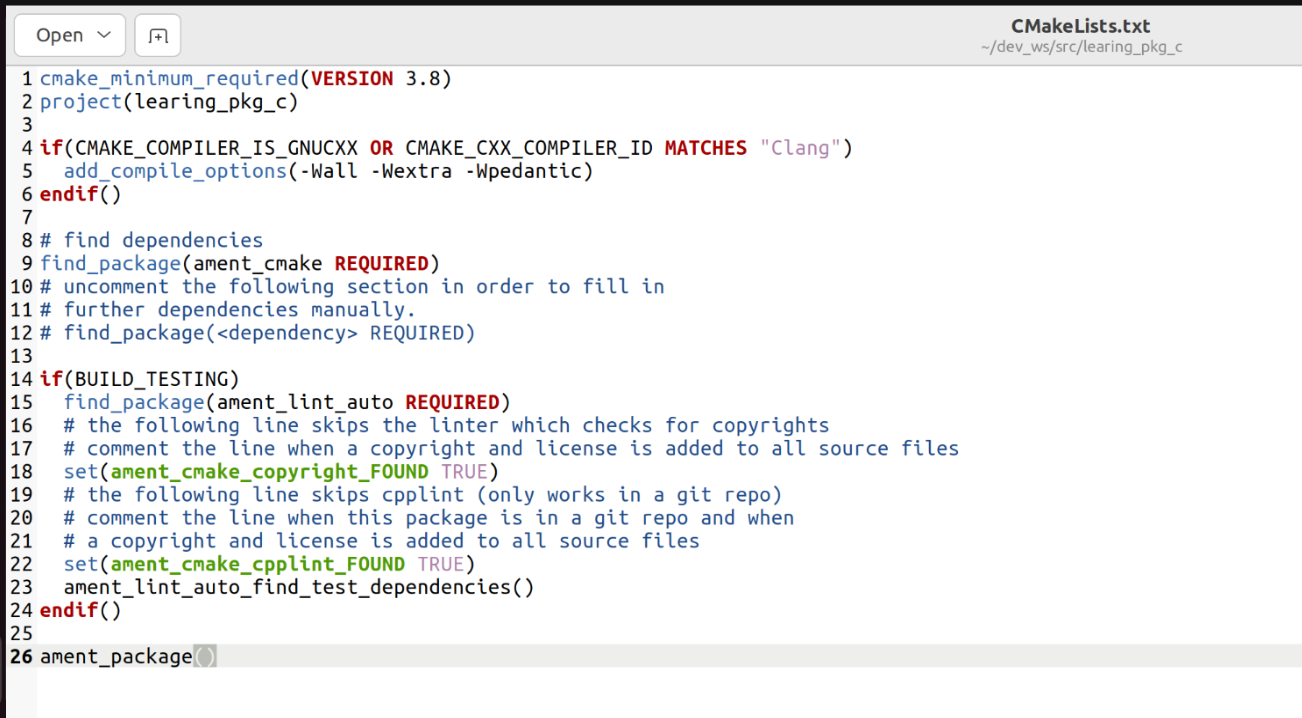
CMakeLists.txt
设置一些编译规则,告诉系统如何编译c/c++代码
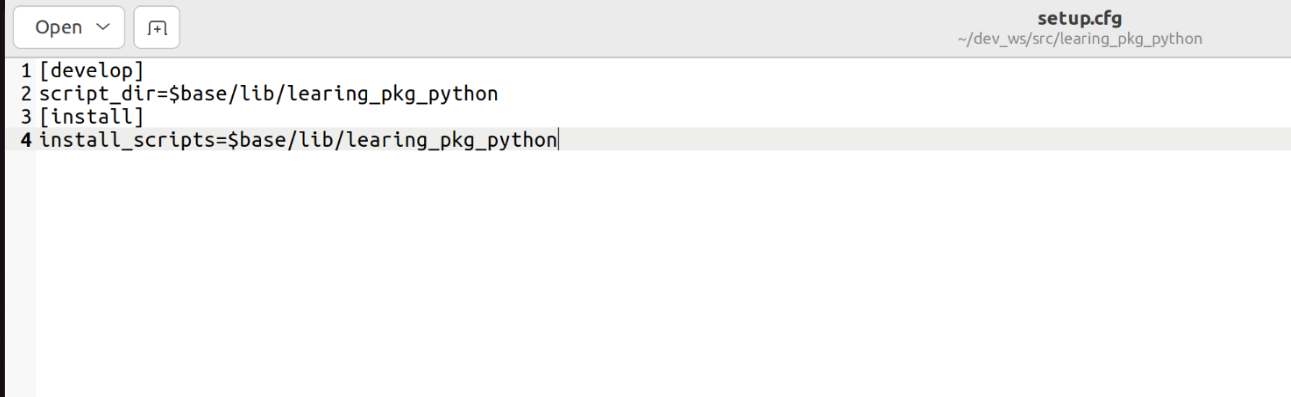
Python功能包
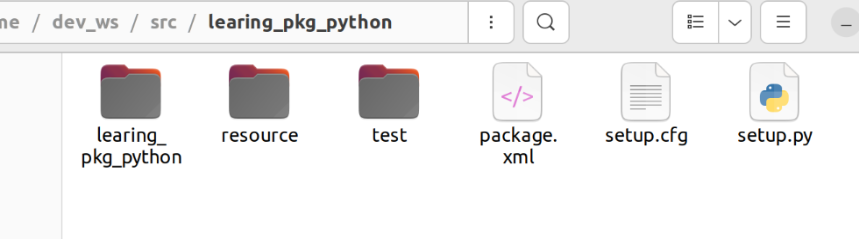
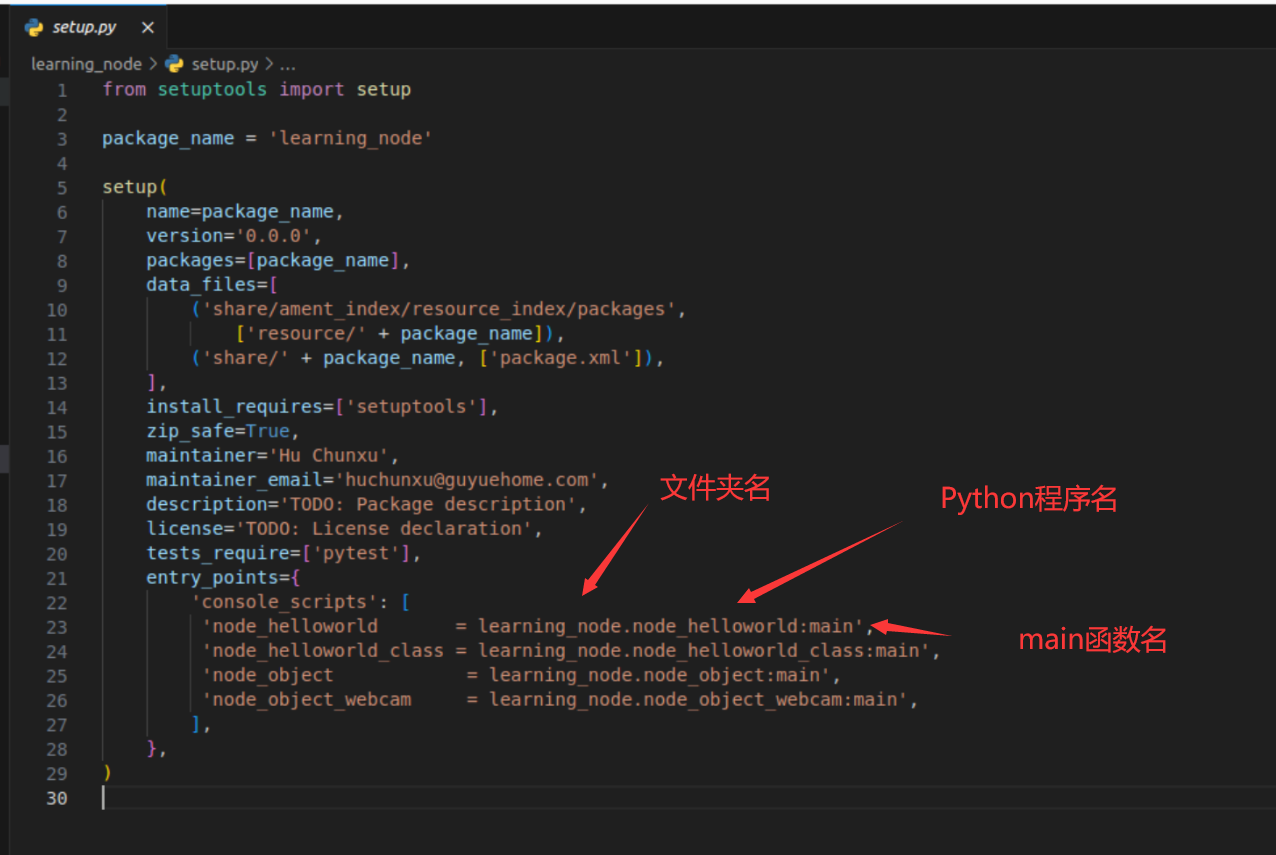
setup.py描述的是对功能包的基本信息以及对入口程序点的描述
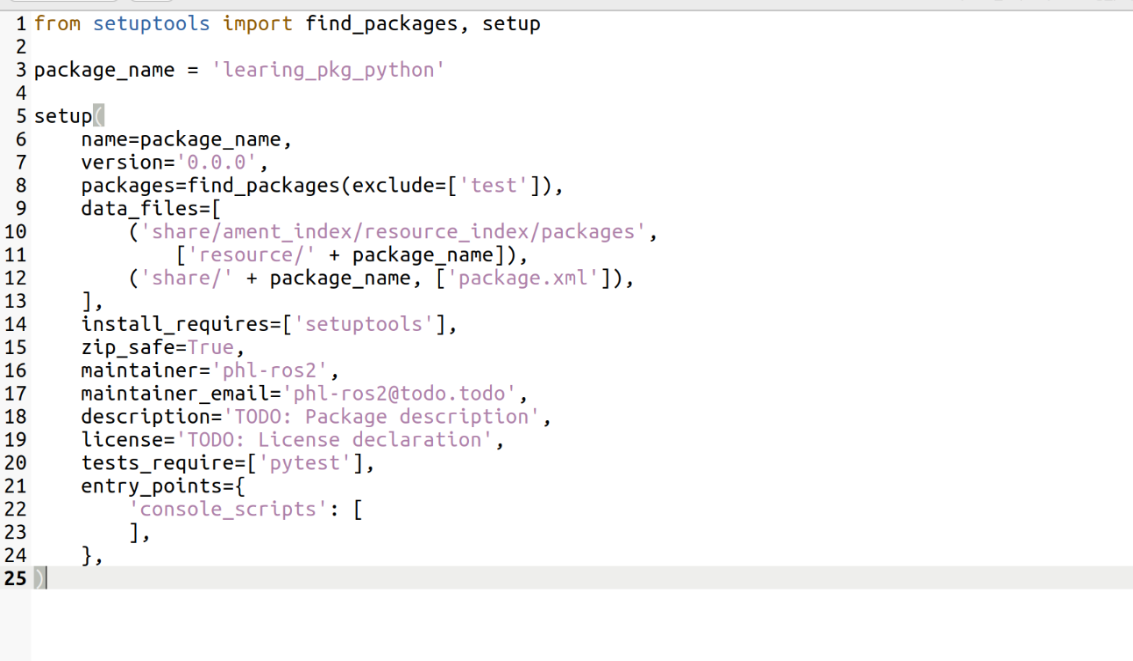
setup.cfg基本的工作空间的信息
节点
- 多个节点组成了整个机器人
-
每个节点都是一个可以独立运行的可执行文件
-
生成这些节点的编程语言是可以不同的
-
节点可以运行在不同主机
-
通过节点名称进行管理
第一个节点实现(面向过程编程)
ros2 run 使用方法

步骤
- 初始化编程接口
- 创建节点并初始化
- 实现节点功能
- 销毁节点并关闭接口
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = Node("node_helloworld") # 创建ROS2节点对象并进行初始化
while rclpy.ok(): # ROS2系统是否正常运行
node.get_logger().info("Hello World") # ROS2日志输出
time.sleep(0.5) # 休眠控制循环时间
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
当我们新增加了一个Python程序之后,需要在这里面添加入口点
面向对象的编程方式
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
"""
创建一个HelloWorld节点, 初始化时输出“hello world”日志
"""
class HelloWorldNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
while rclpy.ok(): # ROS2系统是否正常运行
self.get_logger().info("Hello World") # ROS2日志输出
time.sleep(0.5) # 休眠控制循环时间
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = HelloWorldNode("node_helloworld_class") # 创建ROS2节点对象并进行初始化
node.destroy_node() # 销毁节点对象
rclpy.shutdown()
同样需要添加入口点
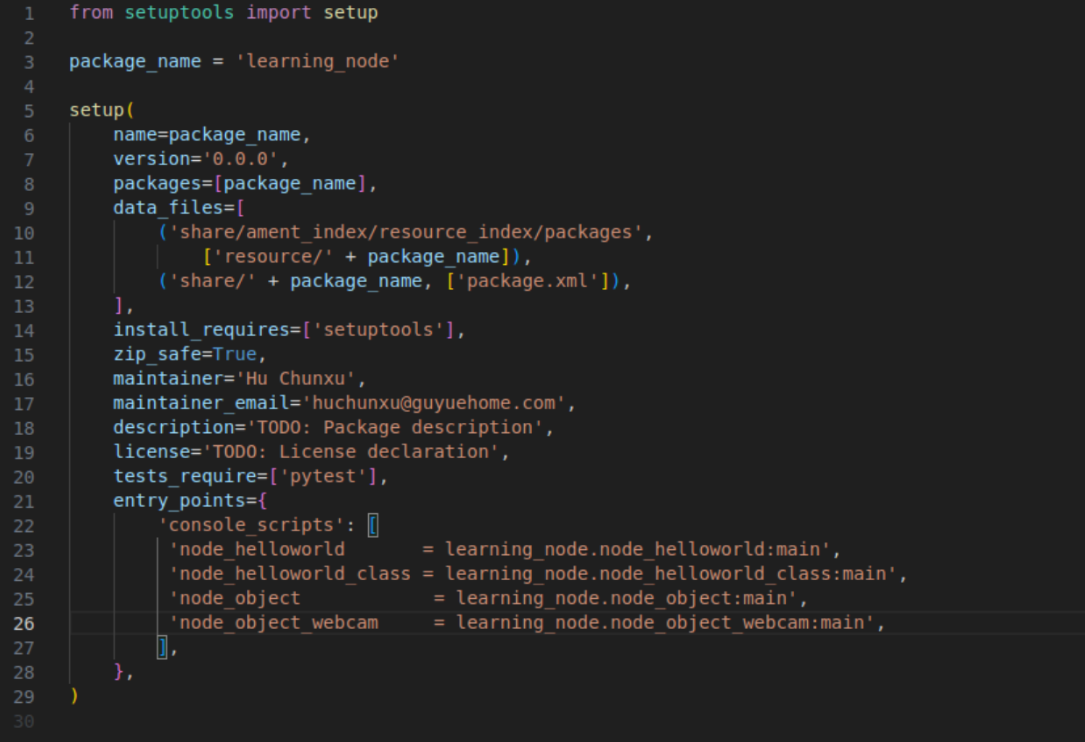
编写完代码后需要重新编译,将src中的代码copy到install中,后期ros2 run 的都是install中的代码
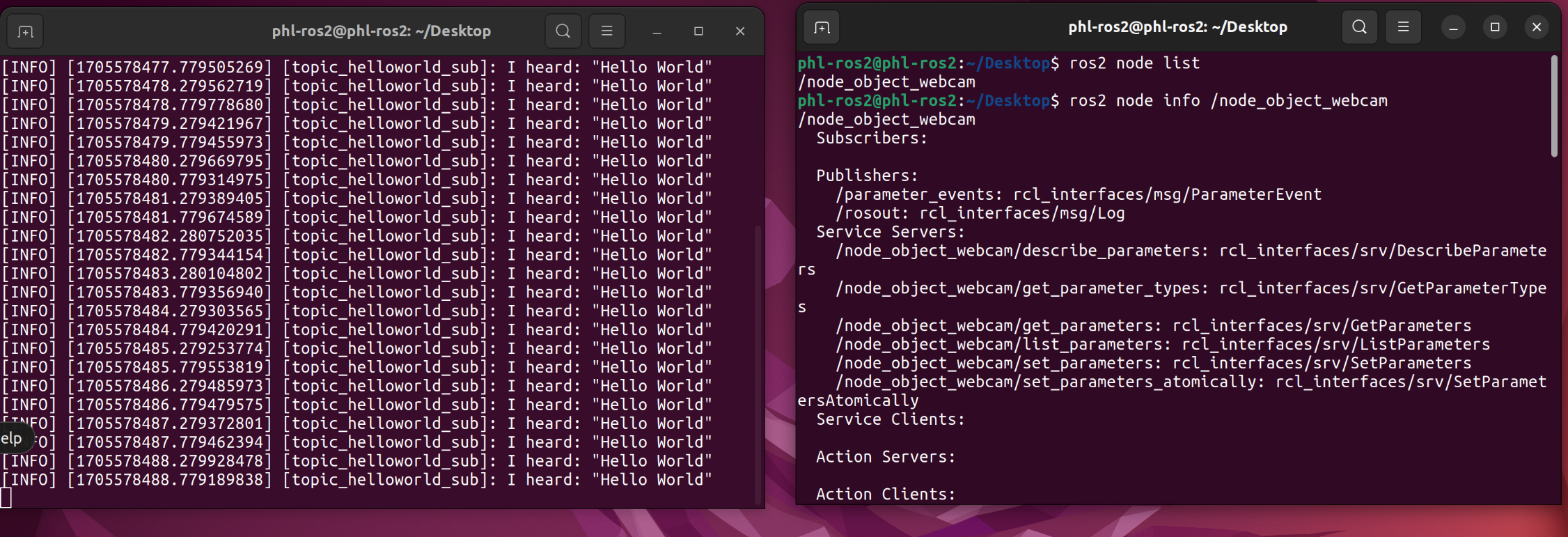
ros2 node list 查看当前节点
ros2 node info /node_object_webcam 查看/node_object_webcam节点的信息
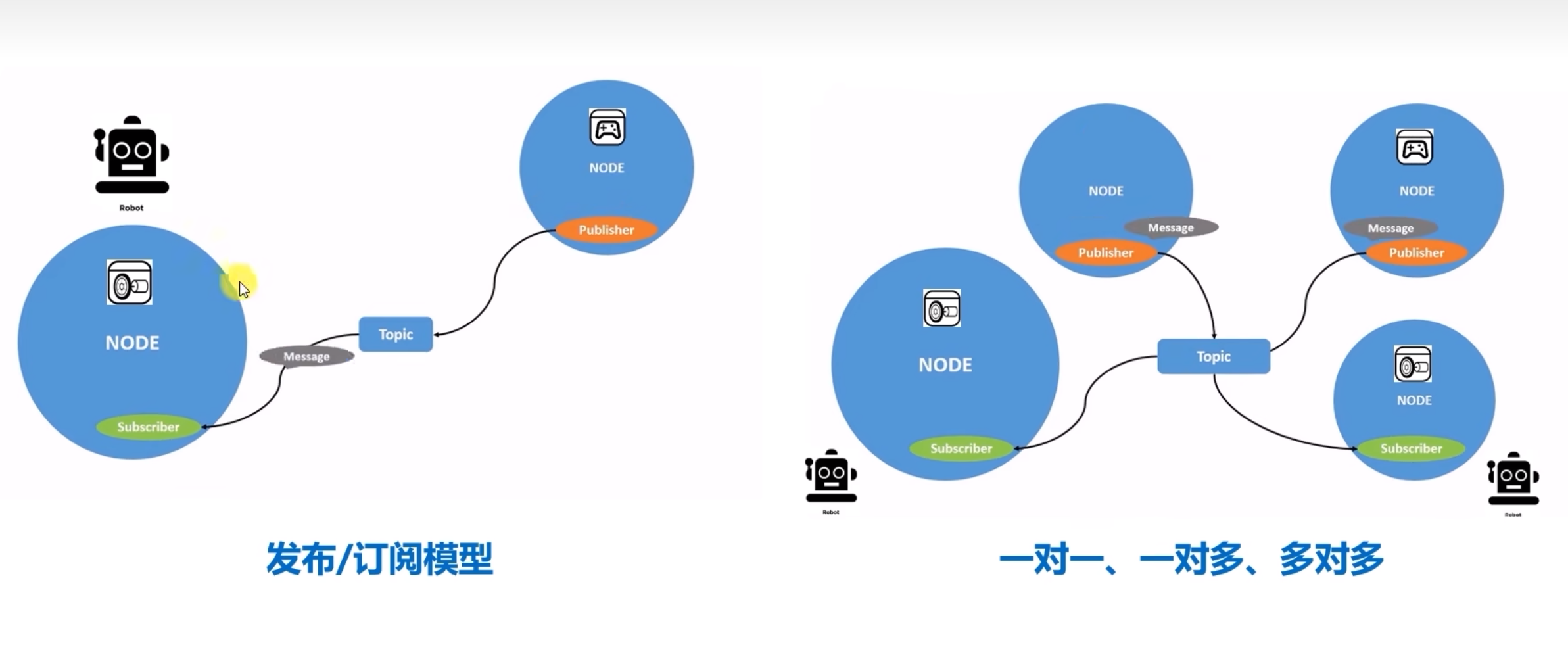
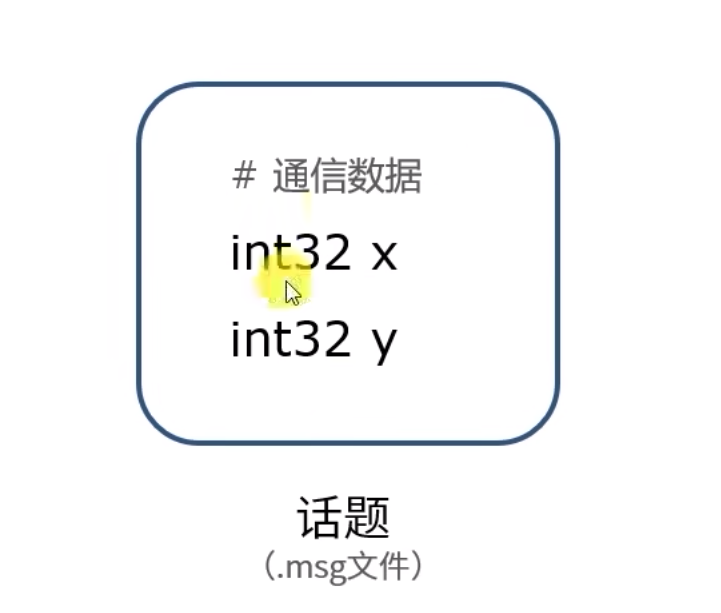
话题:节点间传输数据的桥梁
-
使用了基于DDS的发布订阅模型
-
发布数据的对象称为发布者
-
接收数据的对象称为订阅者
-
传输的数据有固定的数据类型.msg文件
-
发布者和订阅者可以不唯一
-
使用异步通信机制
-
消息是ROS中一种接口定义的方式,与编程语言无关
发布者Publisher
流程
- 编程接口初始化
- 创建节点并初始化
- 创建发布者对象
- 创建并填充话题消息
- 发布话题消息
- 销毁节点并关闭接口
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # 字符串消息类型
"""
创建一个发布者节点
"""
class PublisherNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.pub = self.create_publisher(String, "chatter", 10) # 创建发布者对象(消息类型、话题名、队列长度)
self.timer = self.create_timer(0.5, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
def timer_callback(self): # 创建定时器周期执行的回调函数
msg = String() # 创建一个String类型的消息对象
msg.data = 'Hello World' # 填充消息对象中的消息数据
self.pub.publish(msg) # 发布话题消息
self.get_logger().info('Publishing: "%s"' % msg.data) # 输出日志信息,提示已经完成话题发布
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = PublisherNode("topic_helloworld_pub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
订阅者Subscriber
- 编程接口初始化
- 创建节点并初始化
- 创建订阅者对象
- 回调函数处理话题数据
- 销毁节点并关闭对象
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # ROS2标准定义的String消息
"""
创建一个订阅者节点
"""
class SubscriberNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(\
String, "chatter", self.listener_callback, 10) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
def listener_callback(self, msg): # 创建回调函数,执行收到话题消息后对数据的处理
self.get_logger().info('I heard: "%s"' % msg.data) # 输出日志信息,提示订阅收到的话题消息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = SubscriberNode("topic_helloworld_sub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown()
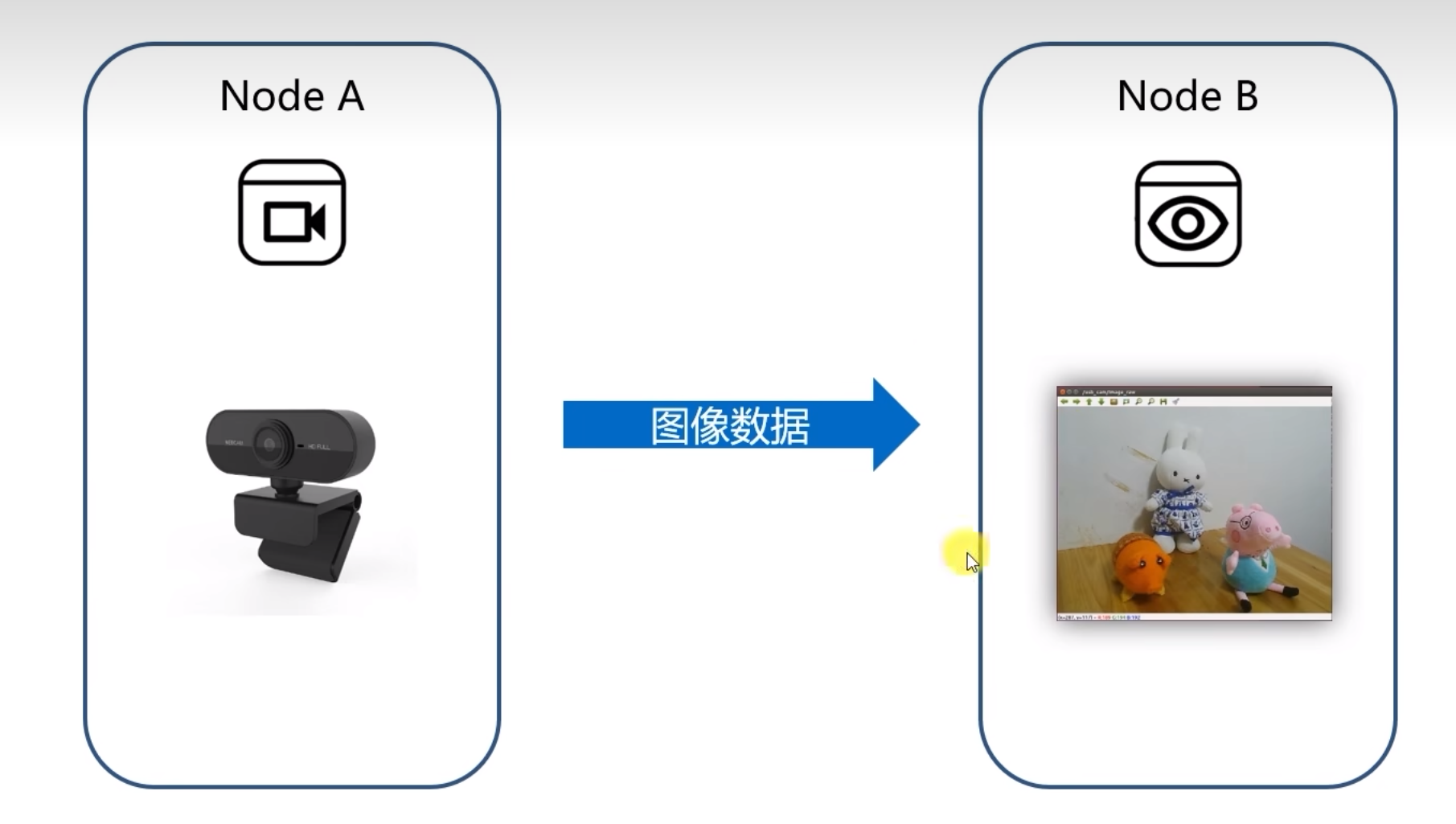
ROS2话题示例-发布图像话题
CvBridge用于转换ROS2和opencv中图像类型的转换
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from sensor_msgs.msg import Image # 图像消息类型
from cv_bridge import CvBridge # ROS与OpenCV图像转换类
import cv2 # Opencv图像处理库
"""
创建一个发布者节点
"""
class ImagePublisher(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.publisher_ = self.create_publisher(Image, 'image_raw', 10) # 创建发布者对象(消息类型、话题名、队列长度)
self.timer = self.create_timer(0.1, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
self.cap = cv2.VideoCapture(0) # 创建一个视频采集对象,驱动相机采集图像(相机设备号)
self.cv_bridge = CvBridge() # 创建一个图像转换对象,用于稍后将OpenCV的图像转换成ROS的图像消息
def timer_callback(self):
ret, frame = self.cap.read() # 一帧一帧读取图像
if ret == True: # 如果图像读取成功
self.publisher_.publish(
self.cv_bridge.cv2_to_imgmsg(frame, 'bgr8')) # 发布图像消息
self.get_logger().info('Publishing video frame') # 输出日志信息,提示已经完成图像话题发布
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ImagePublisher("topic_webcam_pub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
ROS2话题示例-订阅图像话题
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from sensor_msgs.msg import Image # 图像消息类型
from cv_bridge import CvBridge # ROS与OpenCV图像转换类
import cv2 # Opencv图像处理库
import numpy as np # Python数值计算库
lower_red = np.array([0, 90, 128]) # 红色的HSV阈值下限
upper_red = np.array([180, 255, 255]) # 红色的HSV阈值上限
"""
创建一个订阅者节点
"""
class ImageSubscriber(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(
Image, 'image_raw', self.listener_callback, 10) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
self.cv_bridge = CvBridge() # 创建一个图像转换对象,用于OpenCV图像与ROS的图像消息的互相转换
def object_detect(self, image):
hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # 图像从BGR颜色模型转换为HSV模型
mask_red = cv2.inRange(hsv_img, lower_red, upper_red) # 图像二值化
contours, hierarchy = cv2.findContours(
mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) # 图像中轮廓检测
for cnt in contours: # 去除一些轮廓面积太小的噪声
if cnt.shape[0] < 150:
continue
(x, y, w, h) = cv2.boundingRect(cnt) # 得到苹果所在轮廓的左上角xy像素坐标及轮廓范围的宽和高
cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2) # 将苹果的轮廓勾勒出来
cv2.circle(image, (int(x+w/2), int(y+h/2)), 5,
(0, 255, 0), -1) # 将苹果的图像中心点画出来
cv2.imshow("object", image) # 使用OpenCV显示处理后的图像效果
cv2.waitKey(10)
def listener_callback(self, data):
self.get_logger().info('Receiving video frame') # 输出日志信息,提示已进入回调函数
image = self.cv_bridge.imgmsg_to_cv2(data, 'bgr8') # 将ROS的图像消息转化成OpenCV图像
self.object_detect(image) # 苹果检测
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ImageSubscriber("topic_webcam_sub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
usb相机的标准驱动
sudo apt install ros-humble-usb-cam
ros2 run usb_cam usb_cam_node_exe
ros2 run learning_topic topic_webcam_sub
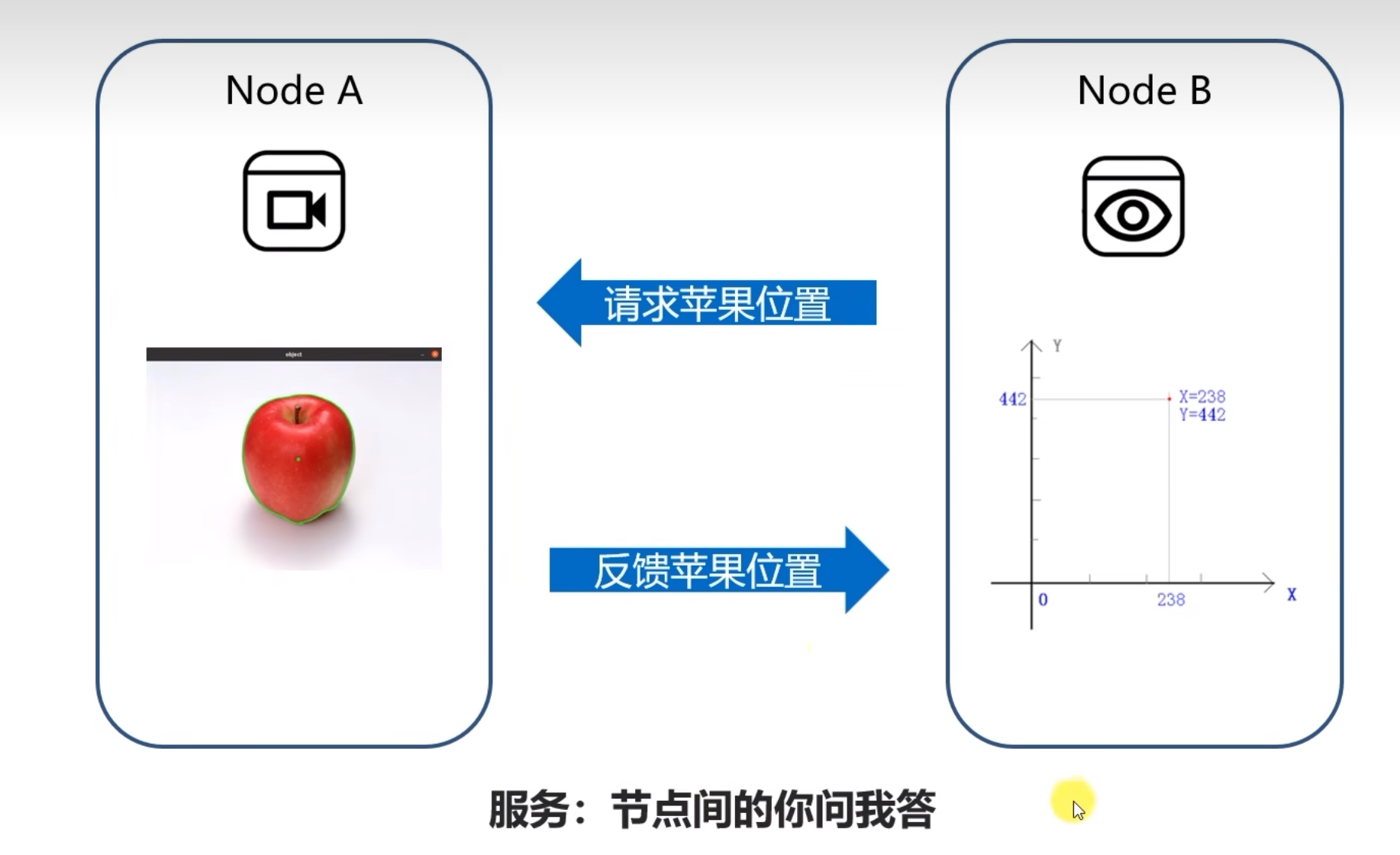
服务
-
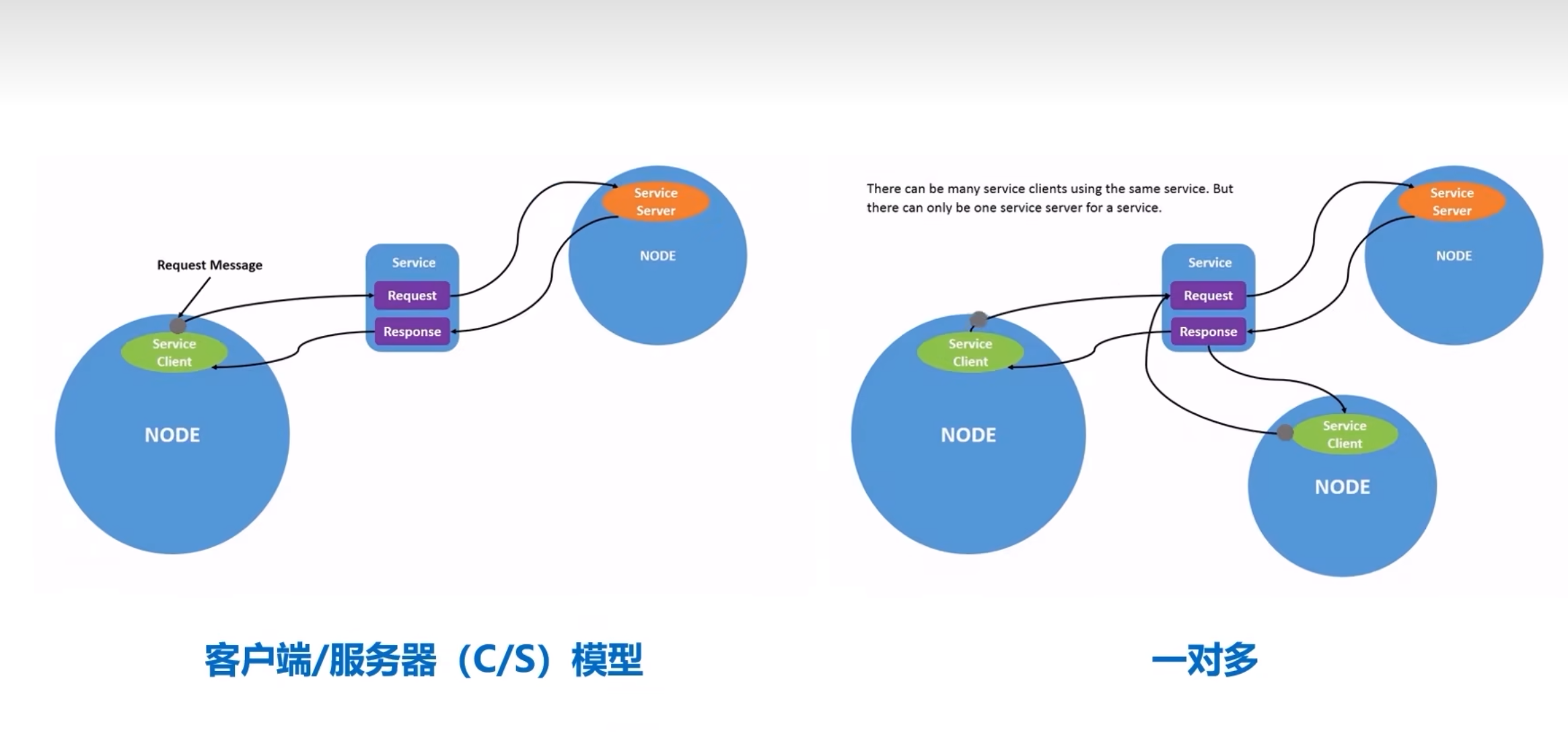
服务通信:CS模型
-
同步通信机制
-
服务器是唯一的,客户端可以不唯一
-
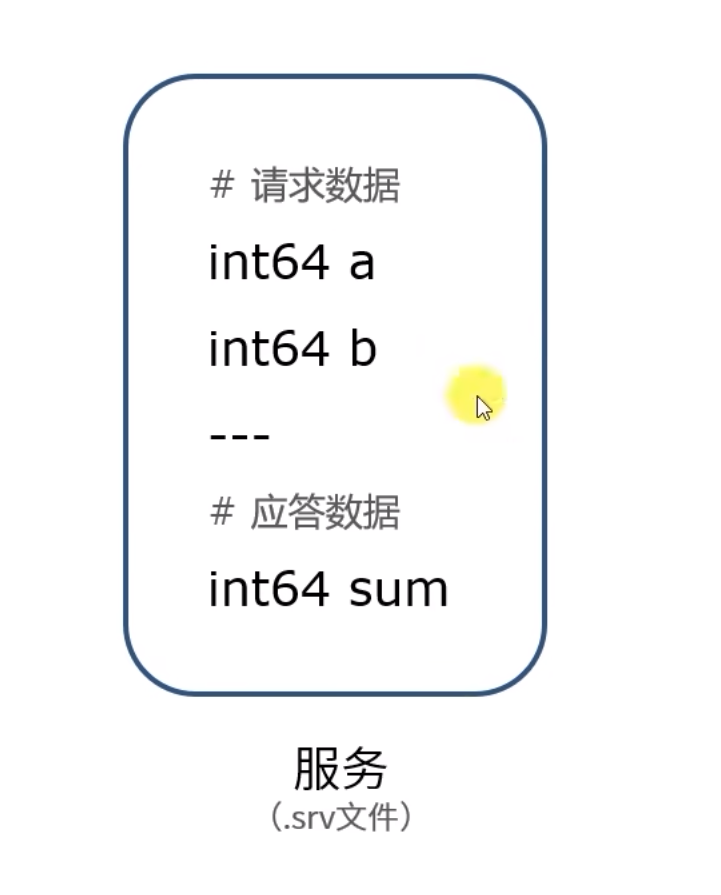
.srv文件定义请求和应答数据结构
服务器端
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from learning_interface.srv import AddTwoInts # 自定义的服务接口
class adderServer(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.srv = self.create_service(AddTwoInts, 'add_two_ints', self.adder_callback) # 创建服务器对象(接口类型、服务名、服务器回调函数)
def adder_callback(self, request, response): # 创建回调函数,执行收到请求后对数据的处理
response.sum = request.a + request.b # 完成加法求和计算,将结果放到反馈的数据中
self.get_logger().info('Incoming request\na: %d b: %d' % (request.a, request.b)) # 输出日志信息,提示已经完成加法求和计算
return response # 反馈应答信息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = adderServer("service_adder_server") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
AddTwoInts类似话题中的消息
客户端
流程
- 编程接口初始化
- 创建节点并初始化
- 创建客户端对象
- 创建并发送请求数据
- 等待服务器端应答数据
- 销毁节点并关闭接口
import sys
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from learning_interface.srv import AddTwoInts # 自定义的服务接口
class adderClient(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.client = self.create_client(AddTwoInts, 'add_two_ints') # 创建服务客户端对象(服务接口类型,服务名)
while not self.client.wait_for_service(timeout_sec=1.0): # 循环等待服务器端成功启动
self.get_logger().info('service not available, waiting again...')
self.request = AddTwoInts.Request() # 创建服务请求的数据对象
def send_request(self): # 创建一个发送服务请求的函数
self.request.a = int(sys.argv[1])
self.request.b = int(sys.argv[2])
self.future = self.client.call_async(self.request) # 异步方式发送服务请求
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = adderClient("service_adder_client") # 创建ROS2节点对象并进行初始化
node.send_request() # 发送服务请求
while rclpy.ok(): # ROS2系统正常运行
rclpy.spin_once(node) # 循环执行一次节点
if node.future.done(): # 数据是否处理完成
try:
response = node.future.result() # 接收服务器端的反馈数据
except Exception as e:
node.get_logger().info(
'Service call failed %r' % (e,))
else:
node.get_logger().info( # 将收到的反馈信息打印输出
'Result of add_two_ints: for %d + %d = %d' %
(node.request.a, node.request.b, response.sum))
break
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
查看服务接口类型 ros2 service type /get_target_position
通过命令行对服务进行请求 ros2 service call /get_target_position learning_interface/srv/GetObjectPosition
通信接口
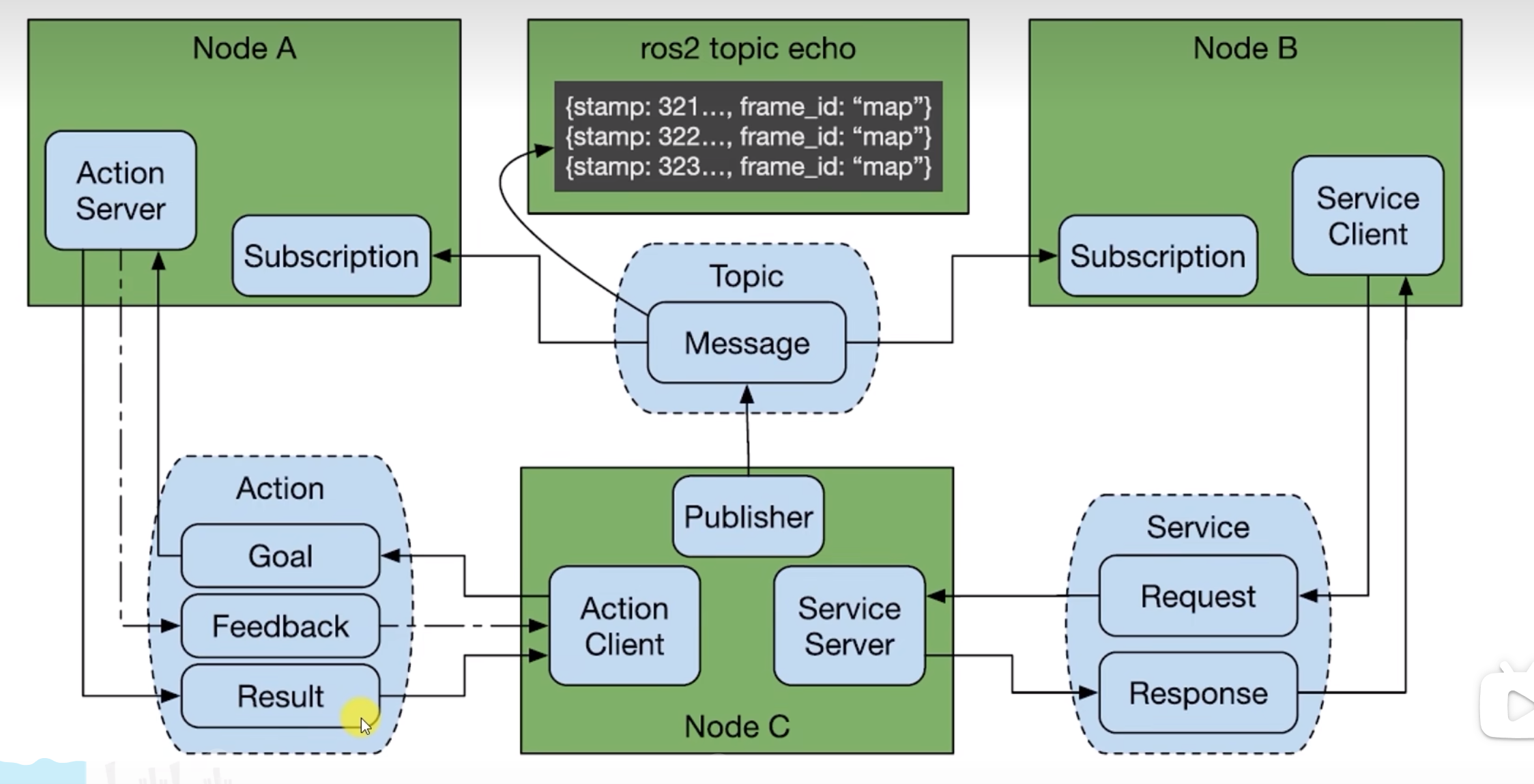
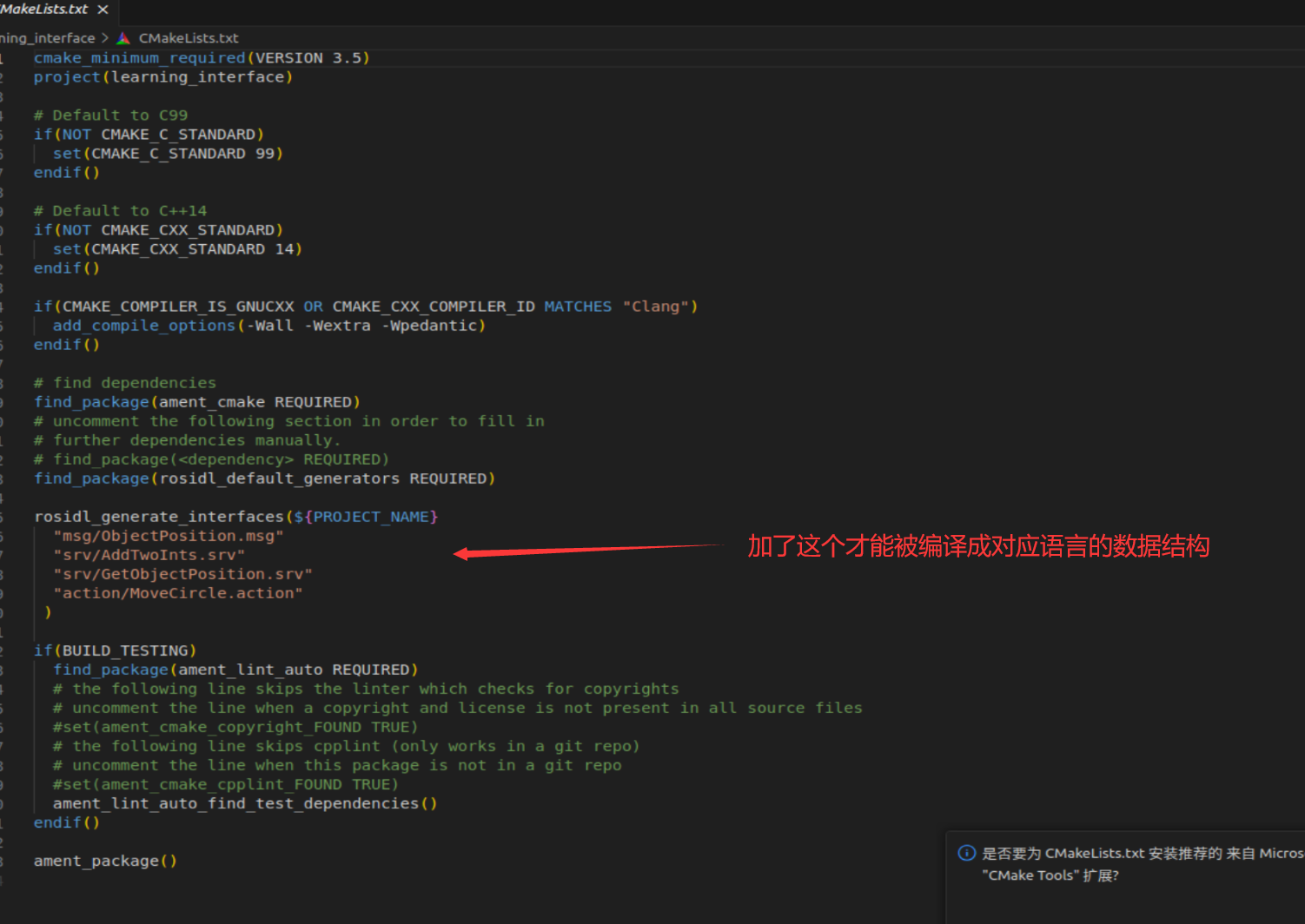
为了实现每个节点都可以使用不同的语言编程,使用了与编程语言无关数据接口,这些接口在编译过程中会自动生成对应的C++、Python等语言中的数据结构
话题
服务
包括请求和应答,通过中间的—区分
ros2
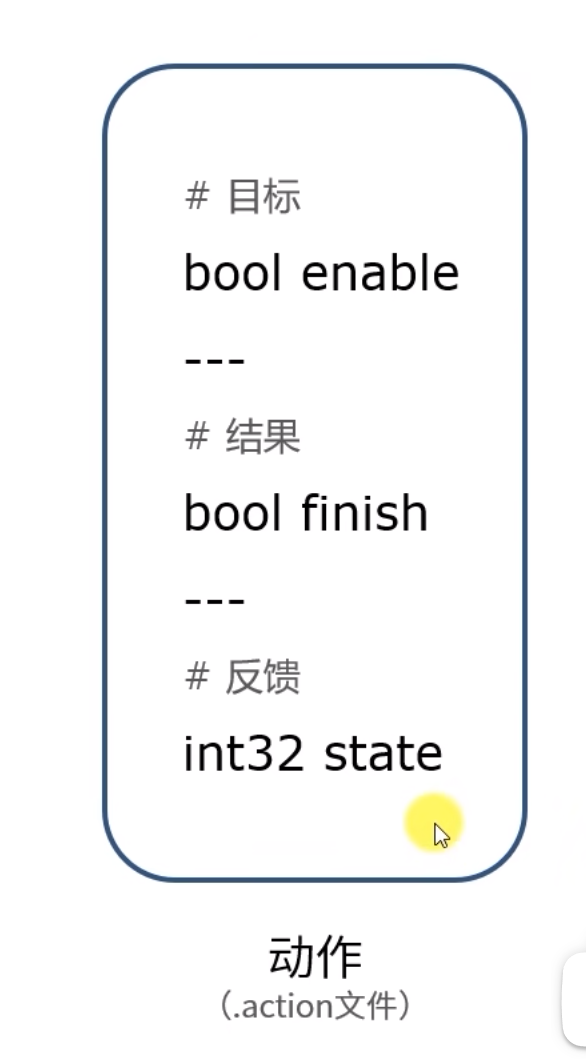
用来描述机器人的动作过程,动作的目标,最终的结果,周期的反馈
ros2 interface list 查看系统中所有的接口定义
ros2 interface show sensor_msgs/msg/Image 查看具体的定义
ros2 interface package learning_interface查看learning_interface功能包中定义的接口
CMakeList.txt
python中通过import使用

从learning_interface功能包下的srv文件夹下引入GetObjectPosition
动作
-
CS客户端服务器模型
-
客户端发送请求想让机器人做什么
-
服务端控制机器人达到控制的目标,同时去周期反馈动作执行过程中的状态
-
同步通信机制
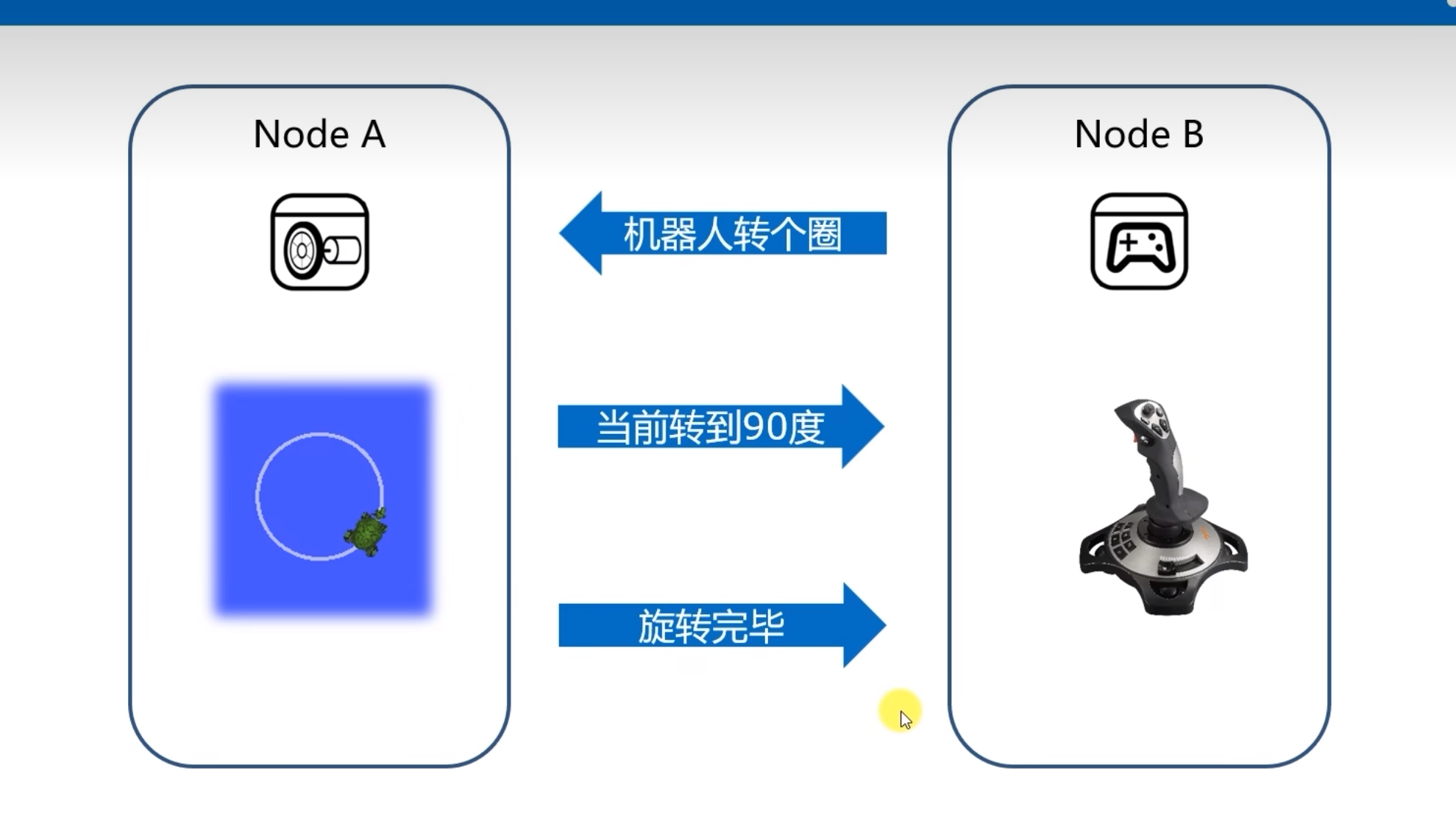
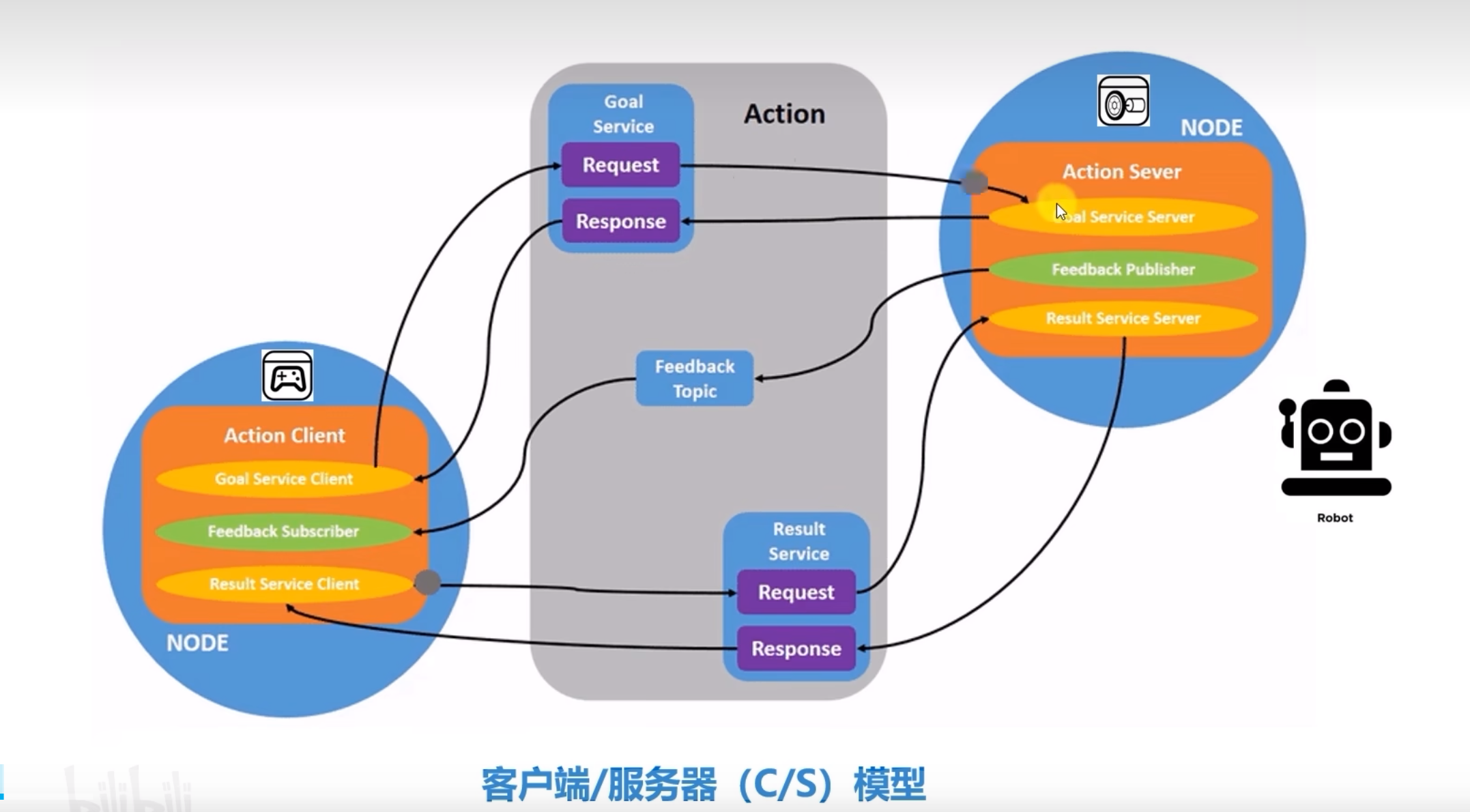
当客户端发送运动目标时,使用的时服务的请求调用,服务器端会反馈应答,表示收到命令,动作的反馈过程就是会提的周期发布,服务器端时发布者,客户端是订阅者,动作是一种应用层的通信机制,其底层是根据话题跟服务来实现的
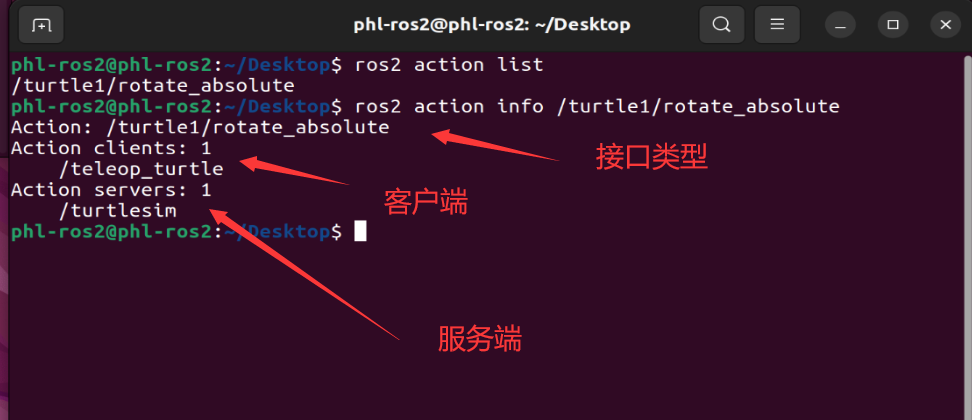
ros2 action list 查看当前存在的动作
Server端
import time
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from rclpy.action import ActionServer # ROS2 动作服务器类
from learning_interface.action import MoveCircle # 自定义的圆周运动接口
class MoveCircleActionServer(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self._action_server = ActionServer( # 创建动作服务器(接口类型、动作名、回调函数)
self,
MoveCircle,
'move_circle',
self.execute_callback)
def execute_callback(self, goal_handle): # 执行收到动作目标之后的处理函数
self.get_logger().info('Moving circle...')
feedback_msg = MoveCircle.Feedback() # 创建一个动作反馈信息的消息
for i in range(0, 360, 30): # 从0到360度,执行圆周运动,并周期反馈信息
feedback_msg.state = i # 创建反馈信息,表示当前执行到的角度
self.get_logger().info('Publishing feedback: %d' % feedback_msg.state)
goal_handle.publish_feedback(feedback_msg) # 发布反馈信息
time.sleep(0.5)
goal_handle.succeed() # 动作执行成功
result = MoveCircle.Result() # 创建结果消息
result.finish = True
return result # 反馈最终动作执行的结果
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = MoveCircleActionServer("action_move_server") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
Client端
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from rclpy.action import ActionClient # ROS2 动作客户端类
from learning_interface.action import MoveCircle # 自定义的圆周运动接口
class MoveCircleActionClient(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self._action_client = ActionClient( # 创建动作客户端(接口类型、动作名)
self, MoveCircle, 'move_circle')
def send_goal(self, enable): # 创建一个发送动作目标的函数
goal_msg = MoveCircle.Goal() # 创建一个动作目标的消息
goal_msg.enable = enable # 设置动作目标为使能,希望机器人开始运动
self._action_client.wait_for_server() # 等待动作的服务器端启动
self._send_goal_future = self._action_client.send_goal_async( # 异步方式发送动作的目标
goal_msg, # 动作目标
feedback_callback=self.feedback_callback) # 处理周期反馈消息的回调函数
self._send_goal_future.add_done_callback(self.goal_response_callback) # 设置一个服务器收到目标之后反馈时的回调函数
def goal_response_callback(self, future): # 创建一个服务器收到目标之后反馈时的回调函数
goal_handle = future.result() # 接收动作的结果
if not goal_handle.accepted: # 如果动作被拒绝执行
self.get_logger().info('Goal rejected :(')
return
self.get_logger().info('Goal accepted :)') # 动作被顺利执行
self._get_result_future = goal_handle.get_result_async() # 异步获取动作最终执行的结果反馈
self._get_result_future.add_done_callback(self.get_result_callback) # 设置一个收到最终结果的回调函数
def get_result_callback(self, future): # 创建一个收到最终结果的回调函数
result = future.result().result # 读取动作执行的结果
self.get_logger().info('Result: {%d}' % result.finish) # 日志输出执行结果
def feedback_callback(self, feedback_msg): # 创建处理周期反馈消息的回调函数
feedback = feedback_msg.feedback # 读取反馈的数据
self.get_logger().info('Received feedback: {%d}' % feedback.state)
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = MoveCircleActionClient("action_move_client") # 创建ROS2节点对象并进行初始化
node.send_goal(True) # 发送动作目标
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
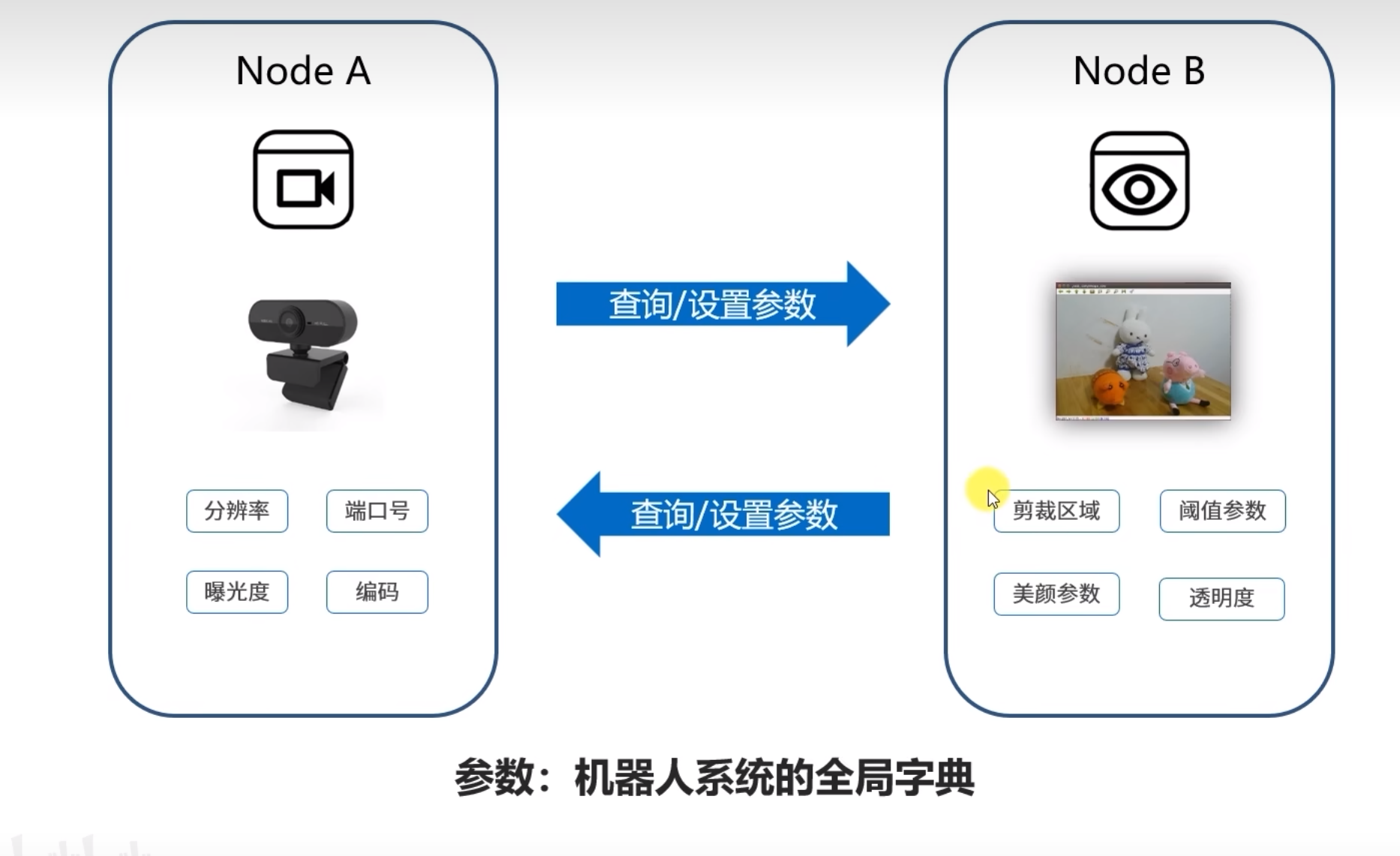
参数
-
ROS机器人的是全局共享字典
-
不同节点都可以访问
-
由键与值组成
-
可实现动态监控
ros2 param describe turtlesim background_b查看turtlesim 的参数background_b的作用
ros2 param get turtlesim background_b 查看turtlesim 的参数background_b的具体值
ros2 param set turtlesim background_b 设置turtlesim 的参数background_b的具体值
使用配置文件
ros2 param dump turtlesim >> turtlesim.yaml 将turtlesim 中所有的参数保存到 turtlesim.yaml中
ros2 param load turtlesim turtlesim.yaml 将turtlesim.yaml中的参数加载到turtlesim中
在程序中设置参数和读取参数
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
class ParameterNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.timer = self.create_timer(2, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
self.declare_parameter('robot_name', 'mbot') # 创建一个参数,并设置参数的默认值
def timer_callback(self): # 创建定时器周期执行的回调函数
robot_name_param = self.get_parameter('robot_name').get_parameter_value().string_value # 从ROS2系统中读取参数的值
self.get_logger().info('Hello %s!' % robot_name_param) # 输出日志信息,打印读取到的参数值
new_name_param = rclpy.parameter.Parameter('robot_name', # 重新将参数值设置为指定值
rclpy.Parameter.Type.STRING, 'mbot')
all_new_parameters = [new_name_param]
self.set_parameters(all_new_parameters) # 将重新创建的参数列表发送给ROS2系统
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ParameterNode("param_declare") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
参数在机器人中的应用
可以在命令行修改参数值
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2参数示例-设置目标识别的颜色阈值参数
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from sensor_msgs.msg import Image # 图像消息类型
from cv_bridge import CvBridge # ROS与OpenCV图像转换类
import cv2 # Opencv图像处理库
import numpy as np # Python数值计算库
lower_red = np.array([0, 90, 128]) # 红色的HSV阈值下限
upper_red = np.array([180, 255, 255]) # 红色的HSV阈值上限
"""
创建一个订阅者节点
"""
class ImageSubscriber(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(Image, # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
'image_raw', self.listener_callback, 10)
self.cv_bridge = CvBridge() # 创建一个图像转换对象,用于OpenCV图像与ROS的图像消息的互相转换
self.declare_parameter('red_h_upper', 0) # 创建一个参数,表示阈值上限
self.declare_parameter('red_h_lower', 0) # 创建一个参数,表示阈值下限
def object_detect(self, image):
upper_red[0] = self.get_parameter('red_h_upper').get_parameter_value().integer_value # 读取阈值上限的参数值
lower_red[0] = self.get_parameter('red_h_lower').get_parameter_value().integer_value # 读取阈值下限的参数值
self.get_logger().info('Get Red H Upper: %d, Lower: %d' % (upper_red[0], lower_red[0])) # 通过日志打印读取到的参数值
hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # 图像从BGR颜色模型转换为HSV模型
mask_red = cv2.inRange(hsv_img, lower_red, upper_red) # 图像二值化
contours, hierarchy = cv2.findContours(mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) # 图像中轮廓检测
for cnt in contours: # 去除一些轮廓面积太小的噪声
if cnt.shape[0] < 150:
continue
(x, y, w, h) = cv2.boundingRect(cnt) # 得到苹果所在轮廓的左上角xy像素坐标及轮廓范围的宽和高
cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2) # 将苹果的轮廓勾勒出来
cv2.circle(image, (int(x+w/2), int(y+h/2)), 5, (0, 255, 0), -1) # 将苹果的图像中心点画出来
cv2.imshow("object", image) # 使用OpenCV显示处理后的图像效果
cv2.waitKey(50)
def listener_callback(self, data):
self.get_logger().info('Receiving video frame') # 输出日志信息,提示已进入回调函数
image = self.cv_bridge.imgmsg_to_cv2(data, "bgr8") # 将ROS的图像消息转化成OpenCV图像
self.object_detect(image) # 苹果检测
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ImageSubscriber("param_object_detect") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
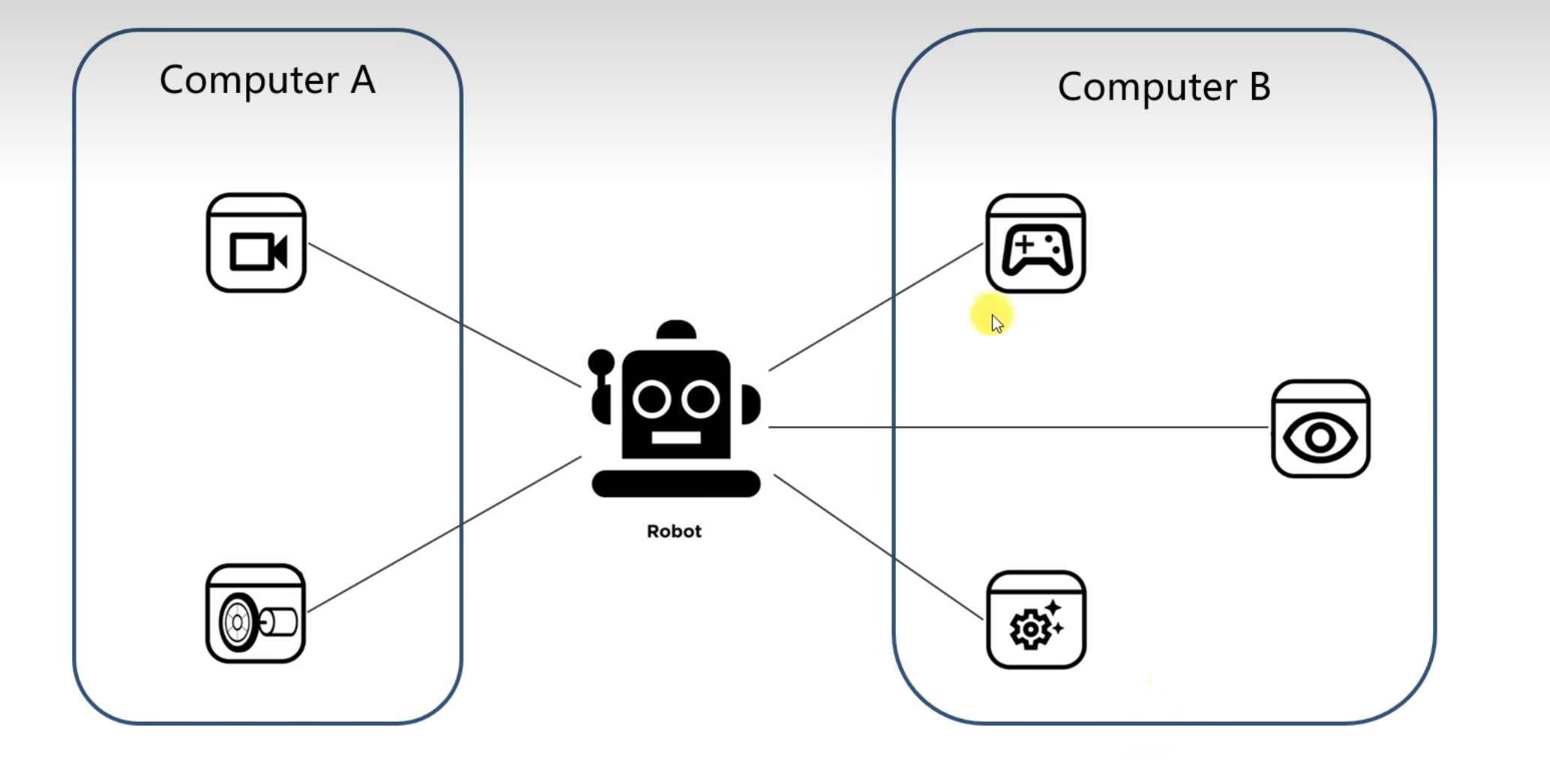
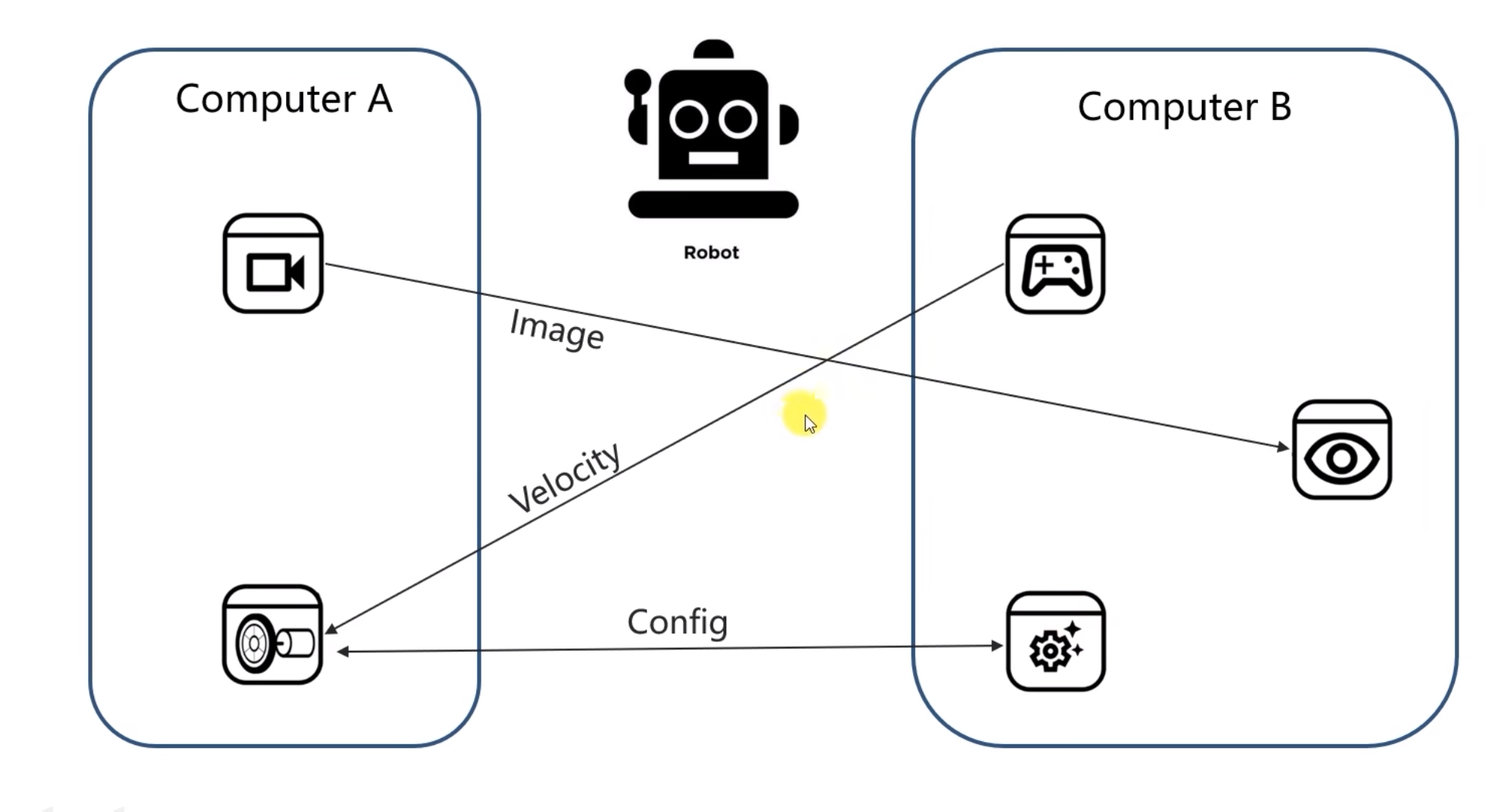
分布式通信
处于同一个网络中就可以通信
ROS2提供了一个DOMAIN的机制,就类似分组一样,处于同一个DOMAIN中的计算机才能通信,我们可以在电脑和树莓派端的.bashrc中加入这样一句配置,即可将两者分配到一个小组中
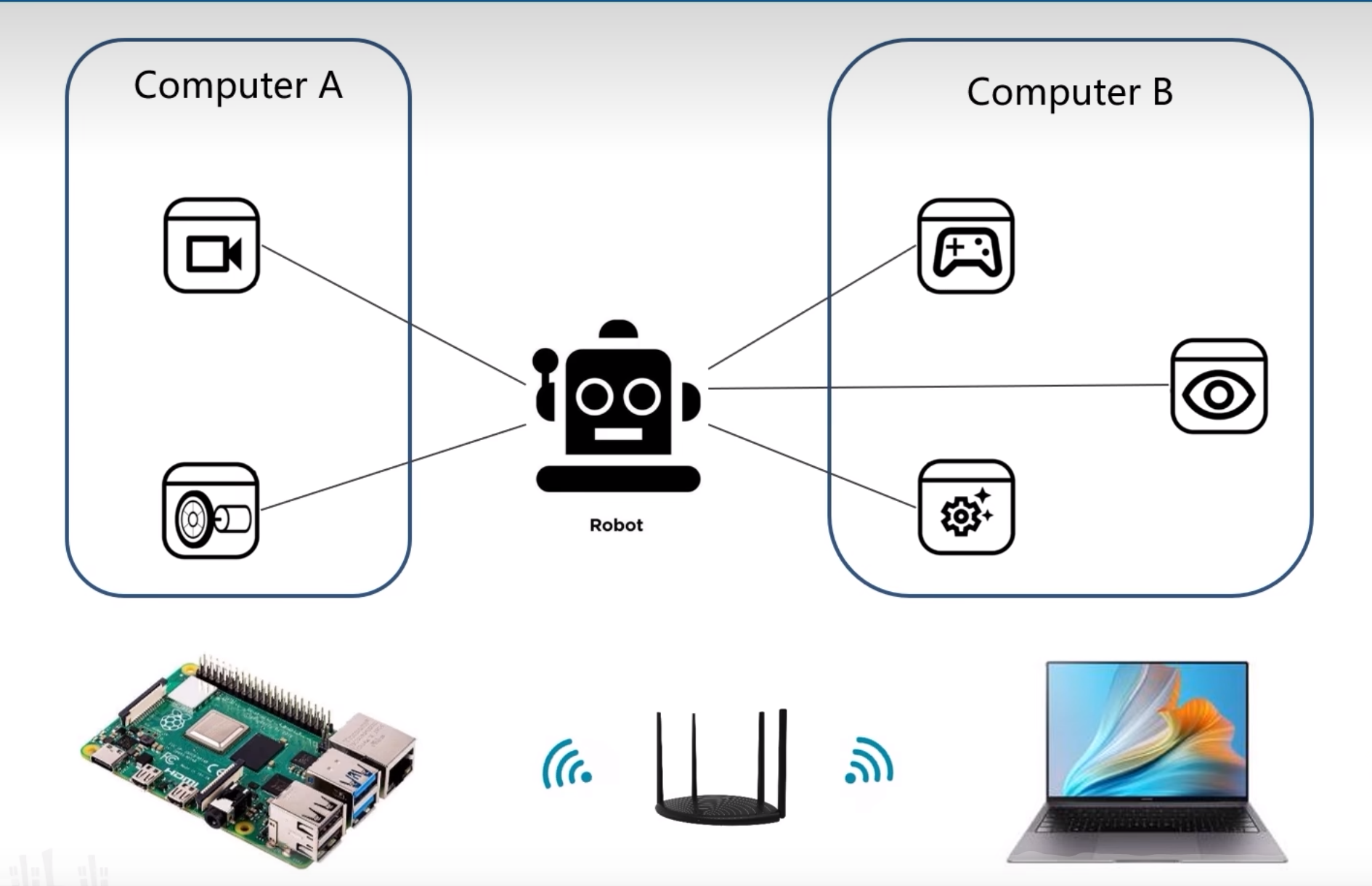
export ROS_DOMAIN_ID=<your_domain_id>
两台设备要在同一个domain中,就可以在同一台设备中一样通信
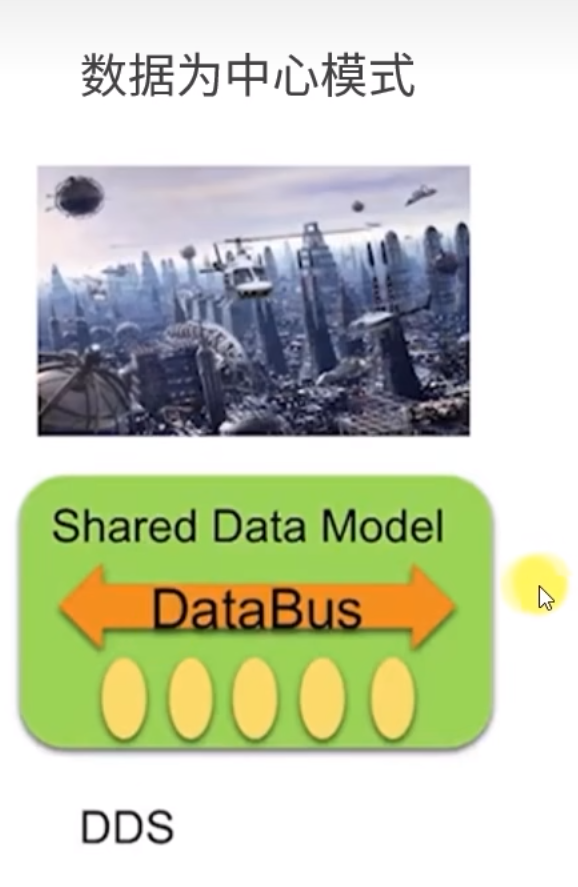
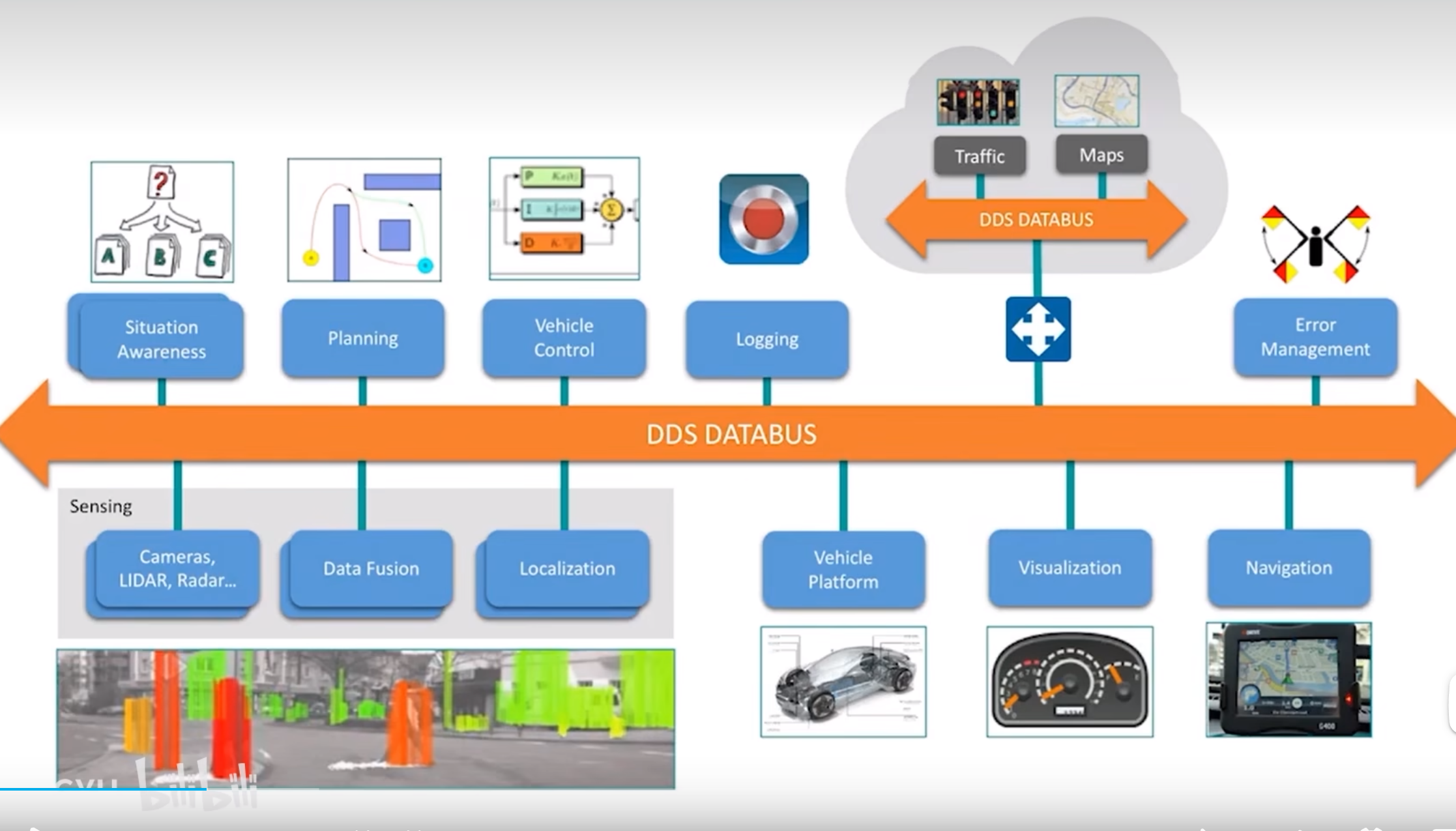
DDS
-
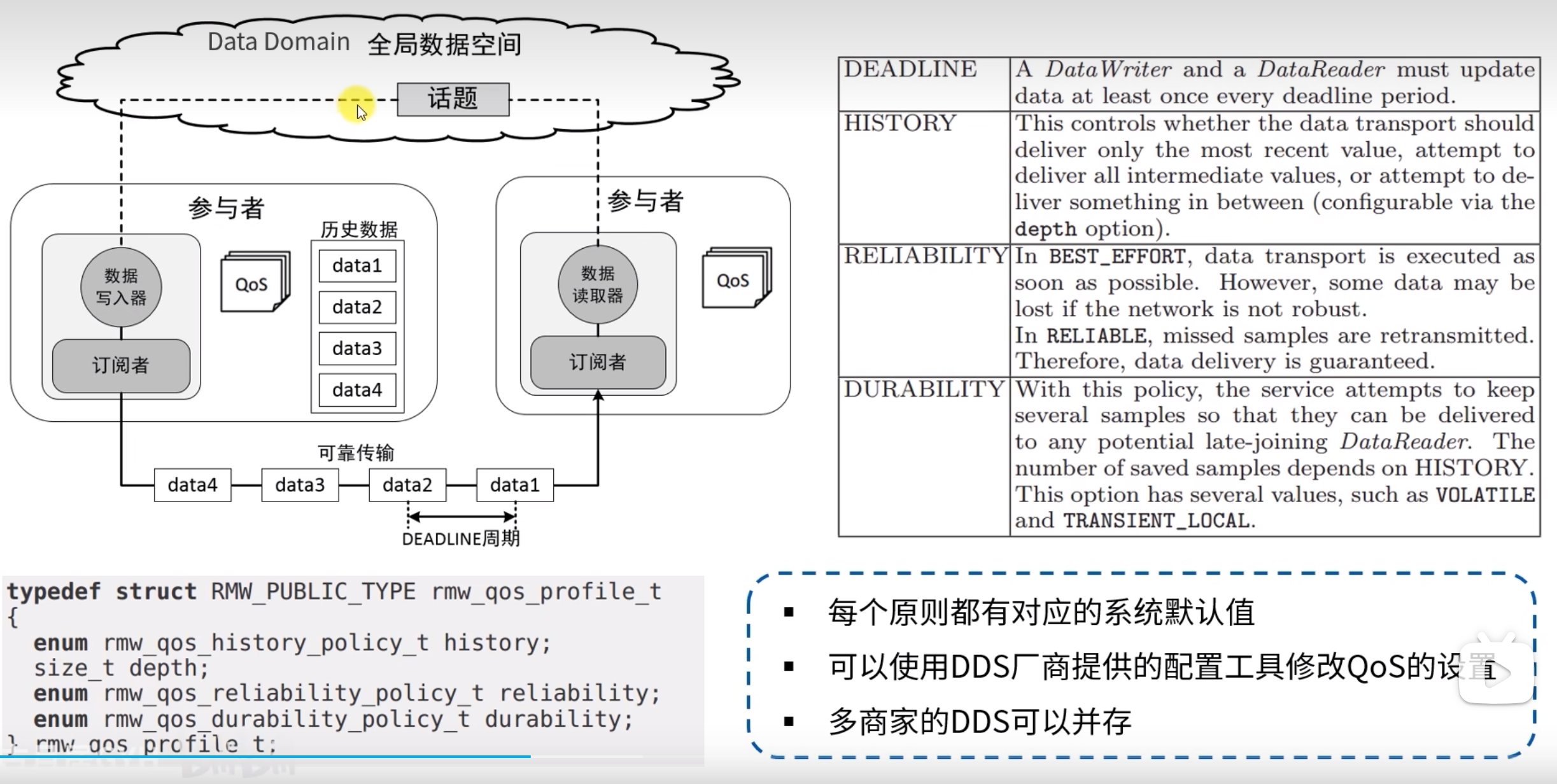
DDS是一种通信模式,数据为中心模式,DDS,Data Distribution Service,即数据分发服务
-
专门为实时系统设计的数据分发/订阅标准
-
DDS强调以数据为中心,提供丰富的服务质量策略(QoS),以保障数据进行实时、高效、灵活地分发,可满足各种分布式实时通信应用需求。
-
是类似4G、5G的一种通信标准
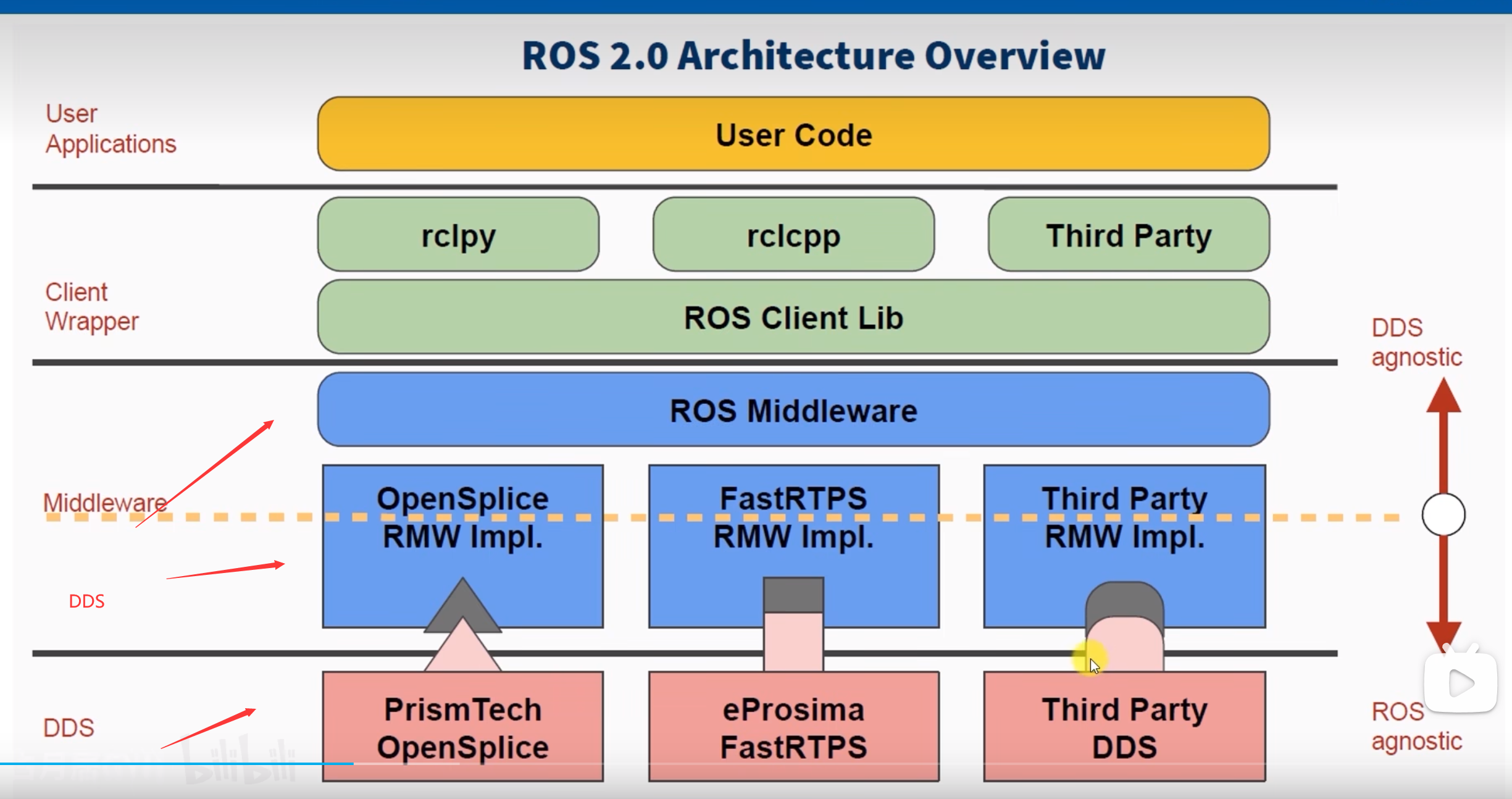
ROS Middleware是一个接口,把兼容性的问题转移给了厂商,各大厂商想要将自己的DDS接入ROS2系统中,需要按照ROS2的接口标准来开发驱动
,根本目的是为了提高软件代码的复用性
DDS将各个应用程序绑定到了一起,只有在一个Domain小组里面的节点菜才能互相通信
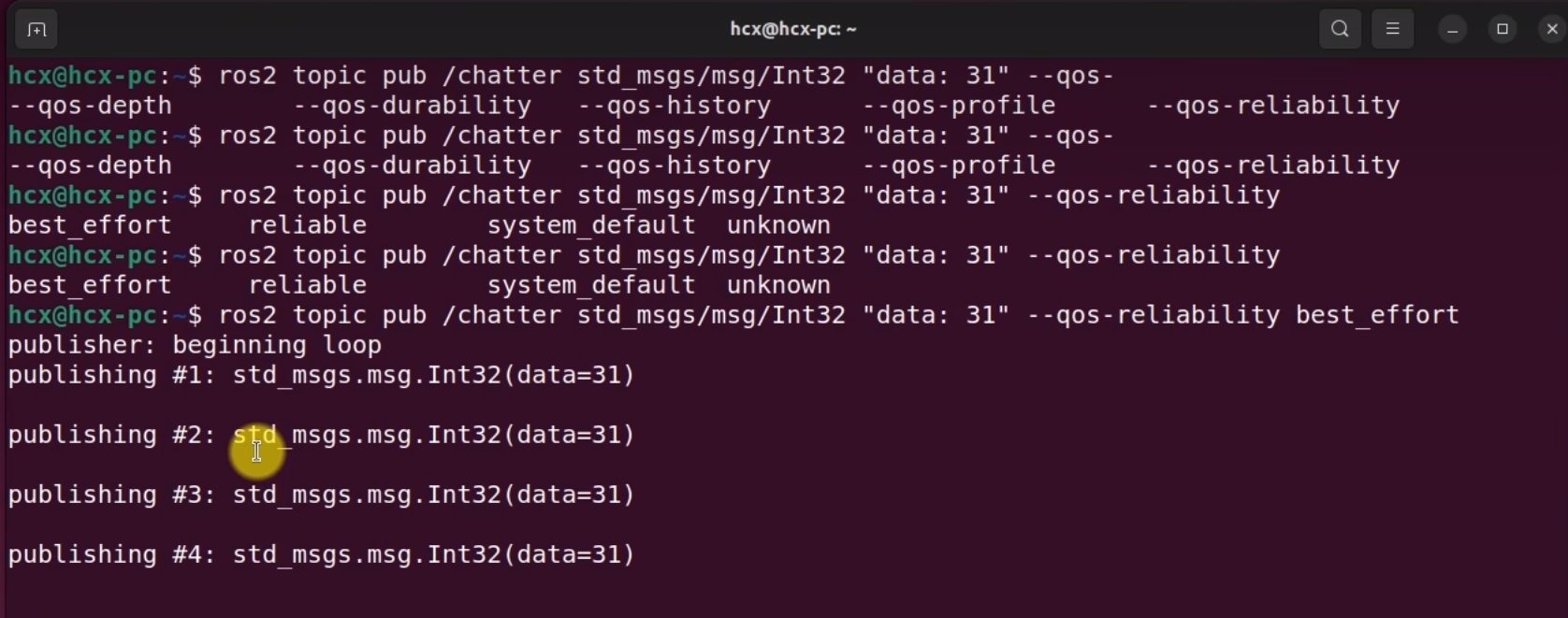
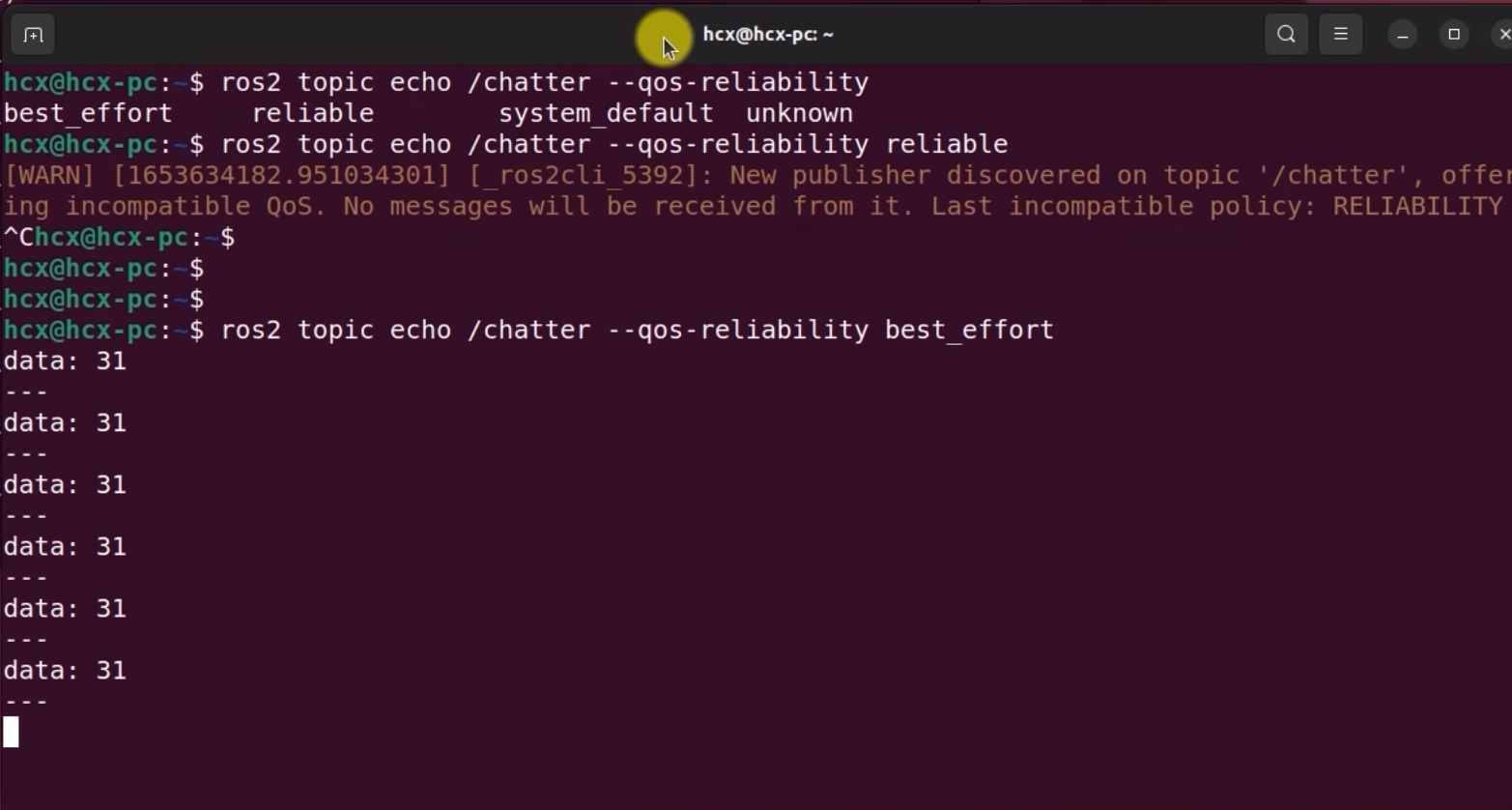
dds的qos的数据传输不一样无法产生通信的数据连接
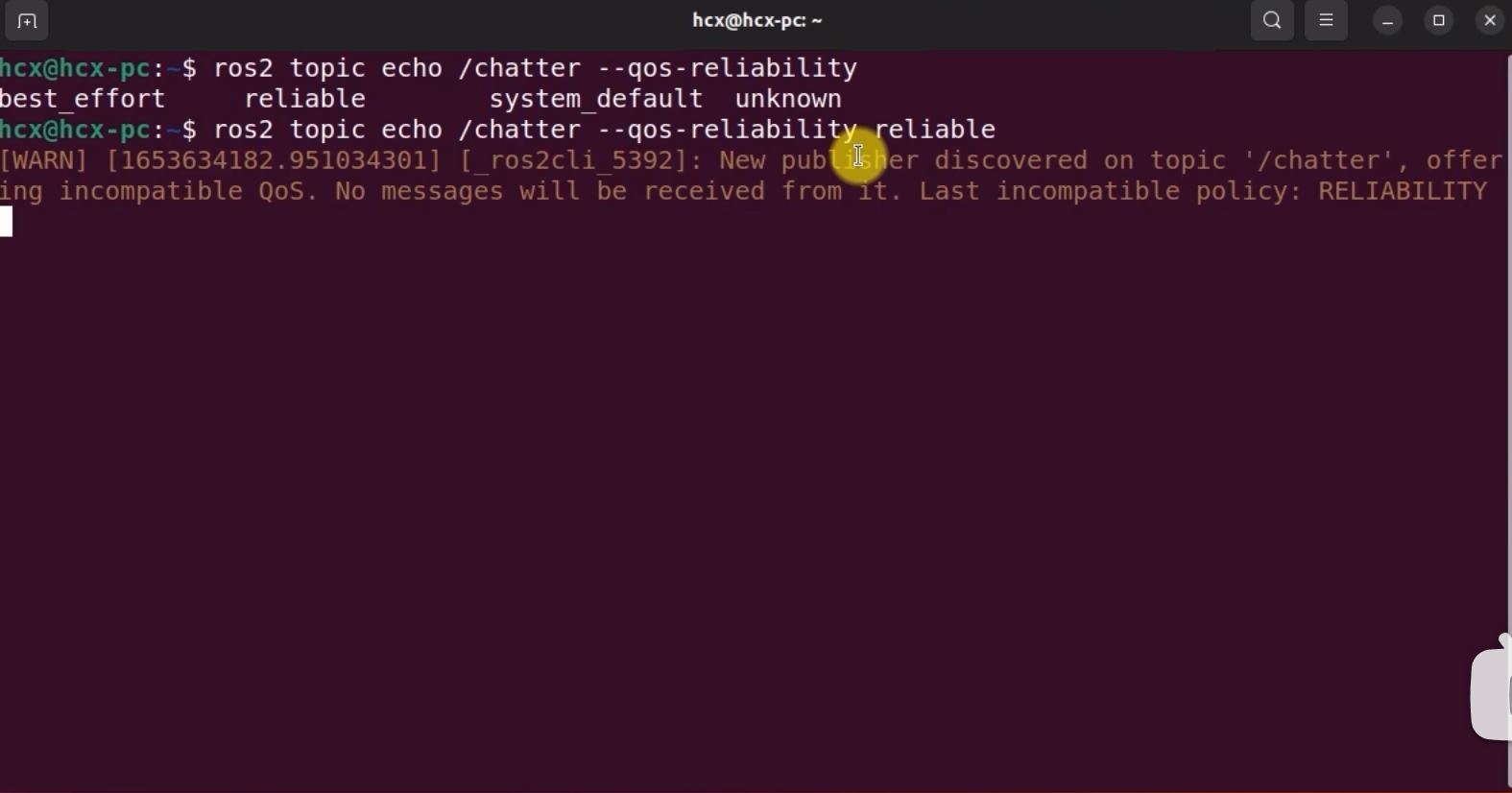
qos数据传输模式一样可以产生通信连接
在代码中配置QOS
发布者
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # 字符串消息类型
from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy # ROS2 QoS类
"""
创建一个发布者节点
"""
class PublisherNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
qos_profile = QoSProfile( # 创建一个QoS原则
# reliability=QoSReliabilityPolicy.BEST_EFFORT,
reliability=QoSReliabilityPolicy.RELIABLE,
history=QoSHistoryPolicy.KEEP_LAST,
depth=1
)
self.pub = self.create_publisher(String, "chatter", qos_profile) # 创建发布者对象(消息类型、话题名、QoS原则)
self.timer = self.create_timer(0.5, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
def timer_callback(self): # 创建定时器周期执行的回调函数
msg = String() # 创建一个String类型的消息对象
msg.data = 'Hello World' # 填充消息对象中的消息数据
self.pub.publish(msg) # 发布话题消息
self.get_logger().info('Publishing: "%s"' % msg.data) # 输出日志信息,提示已经完成话题发布
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = PublisherNode("qos_helloworld_pub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
订阅者
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # ROS2标准定义的String消息
from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy # ROS2 QoS类
"""
创建一个订阅者节点
"""
class SubscriberNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
qos_profile = QoSProfile( # 创建一个QoS原则
# reliability=QoSReliabilityPolicy.BEST_EFFORT,
reliability=QoSReliabilityPolicy.RELIABLE,
history=QoSHistoryPolicy.KEEP_LAST,
depth=1
)
self.sub = self.create_subscription(\
String, "chatter", self.listener_callback, qos_profile) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、QoS原则)
def listener_callback(self, msg): # 创建回调函数,执行收到话题消息后对数据的处理
self.get_logger().info('I heard: "%s"' % msg.data) # 输出日志信息,提示订阅收到的话题消息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = SubscriberNode("qos_helloworld_sub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
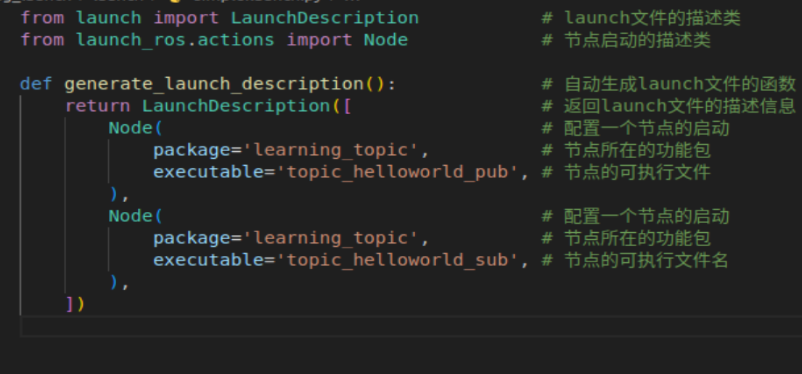
Launch多节点启动与配置脚本
Launch文件可以自由组合和配置各个结点
使用python脚本描述
启动时指定配置文件

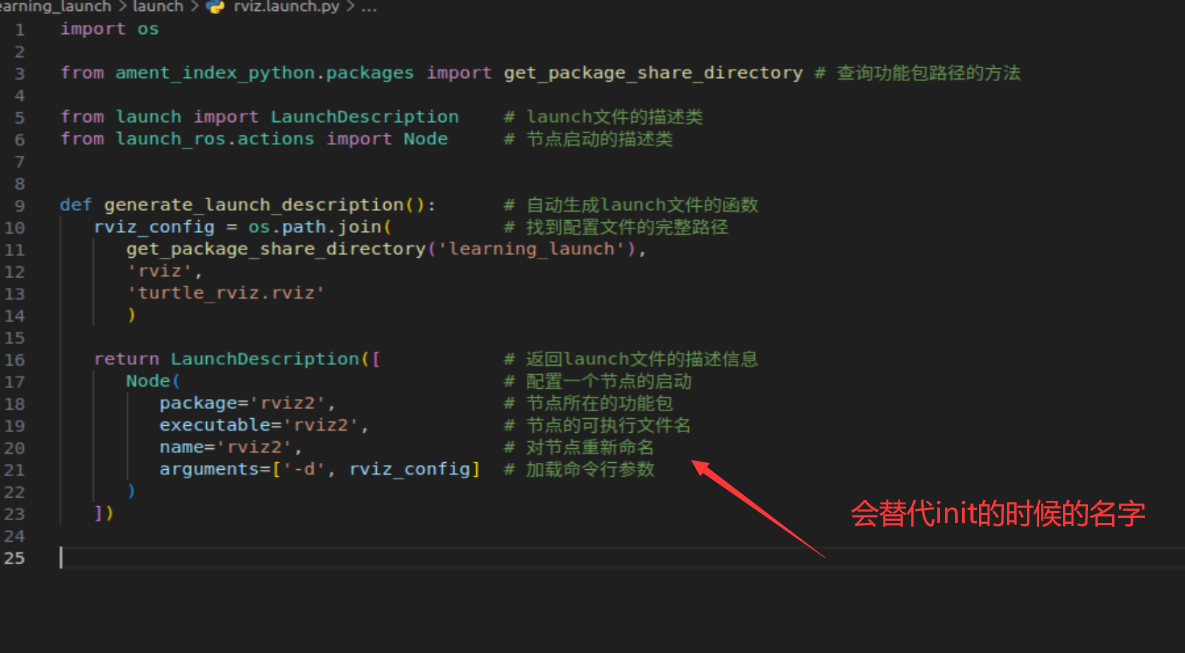

找到系统的learning_launch文件夹里的rviz文件夹里的turtle_rviz.rviz文件
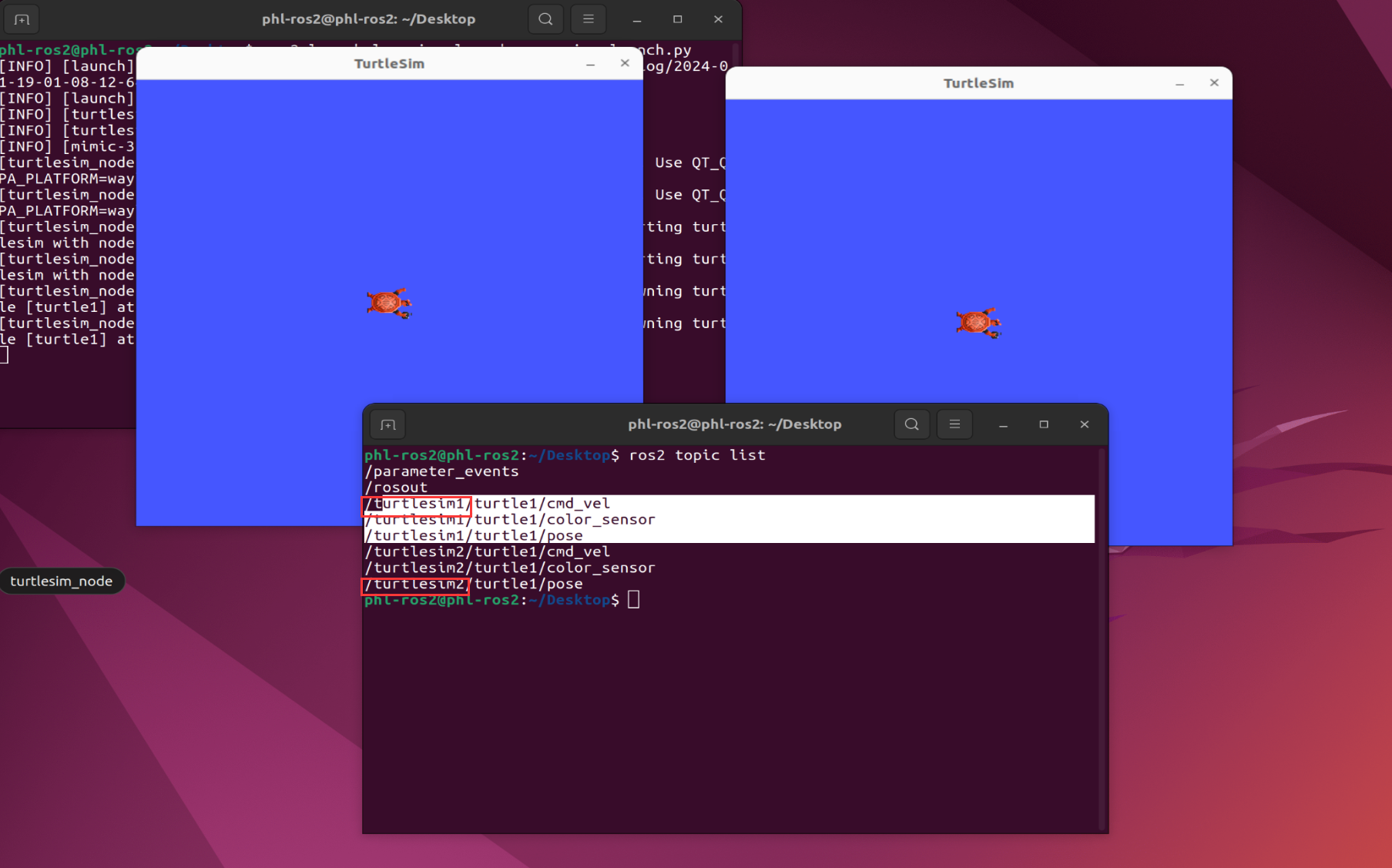
ROS中不允许同名的节点存在,通过命名空间做一个区分
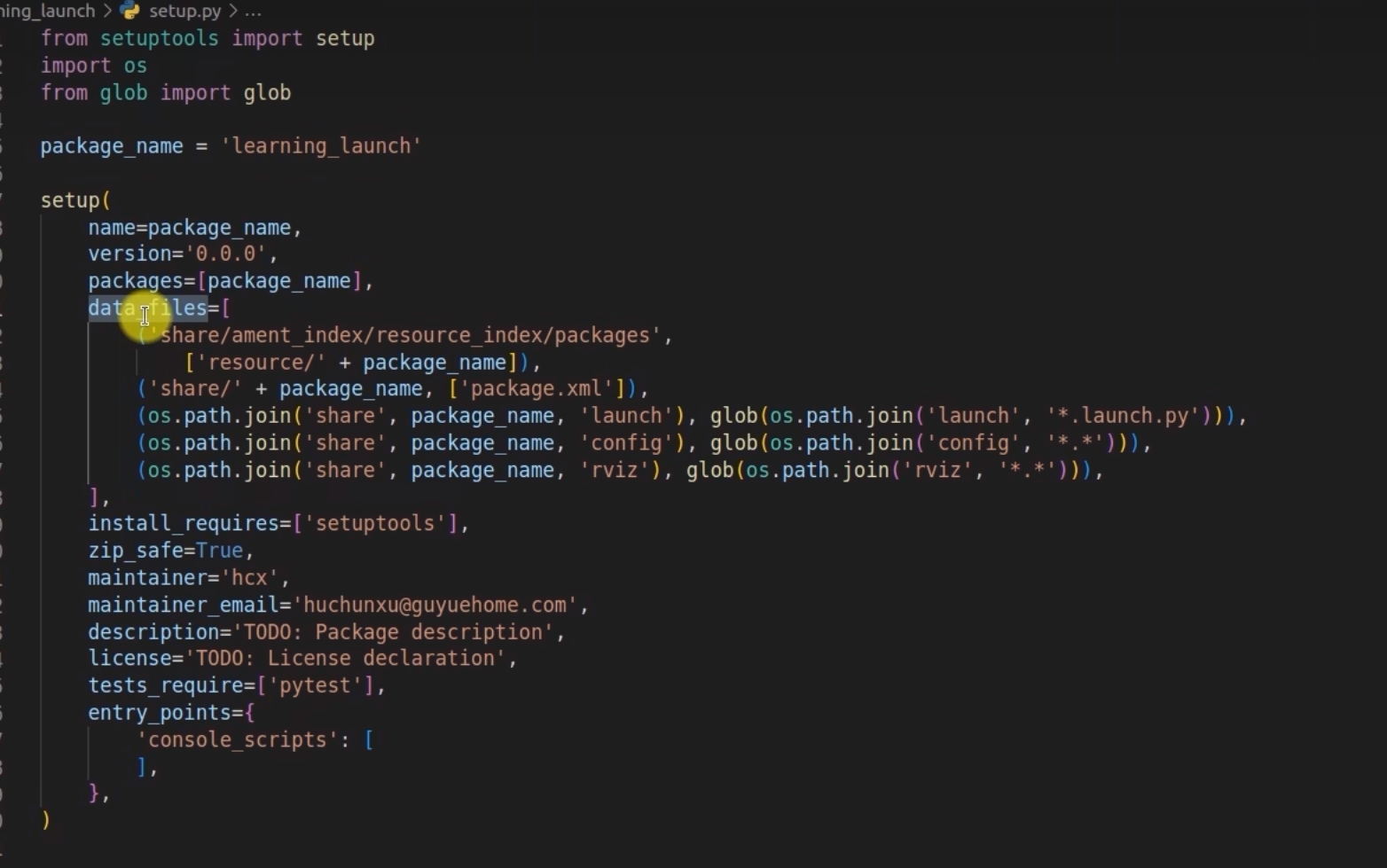
launch也需要在setup.py中配置
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【Linux】修复 Linux 错误 - 地址已在使用中
- 基于ZU19EG的100G-UDP解决方案
- APP应用加固指南:如何有效辨别,网络上伪造的地理位置?
- 数字企业展厅有哪些优势,数字企业展厅应该具备哪些功能
- 汽配企业MES管理系统解决方案需求分析
- 邮件发送问题
- 6.6TB 全球地名路网透明标签瓦片地图
- ERP系统怎么选 企业ERP管理系统选型建议
- 只需要1天+10元,上线我的第①个工具站 - 50个工具站打卡计划
- AI嵌入式K210项目(1)-芯片开发板介绍