使用OAK-D双目深度相机为turtlebot3小型移动机器人添加视觉系统
编辑:OAK中国
首发:oakchina.cn
喜欢的话,请多多👍???
内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。
▌前言
Hello,大家好,这里是OAK中国,我是Ashely。
许久没给大家分享用户的实际应用了,最近在medium上看到有个用户写的博客,来给借鉴一下。
如果你对这种项目感兴趣,可以参看我之前分享的OAK相机用在TurtleBot3 Waffle上的博客。(地址)
接下来请看正文~
▌正文
在我的上篇博客中,我试图用雷达来增强我的turtlebot3机器人。不过,我认为如果在机器人上安装一个摄像头,甚至更好的深度摄像头,我就可以利用点云和深度算法做路径规划、SLAM、自主导航等。鉴于此,我决定集成一个具有深度功能的简单深度摄像头。3D摄像头有很多选择,但对于小型机器人来说,它们可能非常昂贵(如zed和realsense)或笨重(如kinect v2),而我要求尽量简单和便宜。我最终选择了OAK-D,因为它的尺寸、价格和内置处理能力都很不错。
将硬件安装到机器人上
首先要做的是弄清楚如何将摄像头安装到我的 turtlebot3 burger上。因为我不想移除激光雷达,因此将其移至原始位置上方 5 厘米处,并将OAK-D放在前面,这样我就可以同时拥有两个传感器!

在ROS上运行
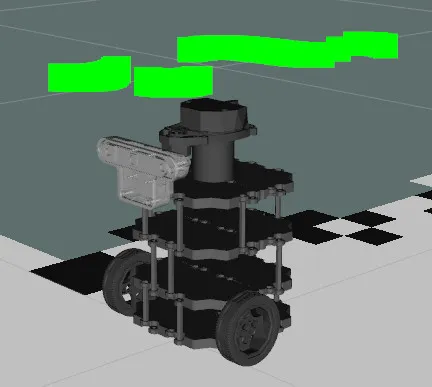
虽然安装需要一些时间,但这并不是过程中最困难的部分。下一步是修改机器人描述,以包括OAK-D传感器和激光雷达。这是 turtlebot3 burger的增强版的可视化。
现在让我们看看 rviz 中OAK-D生成的 3D 点云。
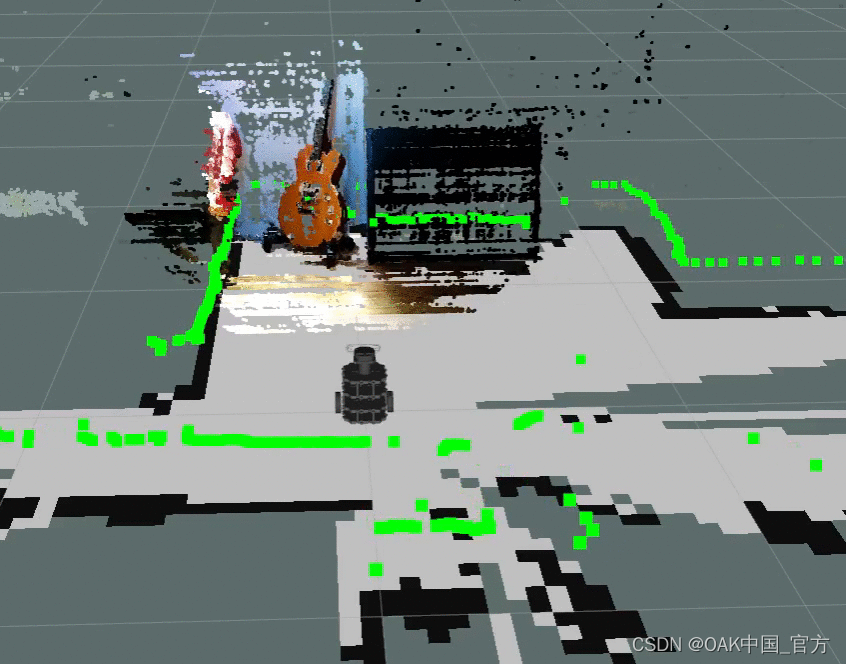
输出看起来很棒!但是,我只是叠加彩色图像和深度图像以生成输出。尽管如此,这为 turtlebot3 burger 打开了大门,可以开始使用 OAK-D 添加的处理进行一些有趣的 3D 点云实验和深度学习!(官方使用案例)
OAK中国
| OpenCV AI Kit在中国区的官方代理商和技术服务商
| 追踪AI技术和产品新动态
戳「+关注」获取最新资讯↗↗
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Kafka教程
- Java基础复习题+知识点概括(上篇)
- TS 36.213 V12.0.0-功率控制
- DevC++ easyx实现悬浮窗放入网格,与在函数分离过程中遇到的BUG下理解 函数的作用时域 以及 初始化与复位的关系。
- 机器学习原理到Python代码实现之LinearRegression
- 爬虫工作量由小到大的思维转变---<第二十一章 Scrapy日志设置与Python的logging模块对比>
- 122. 买卖股票的最佳时机 II(Java)
- 实习知识整理10: 渲染默认地址以及实现渲染并选择其他地址
- Rockchip平台双屏异显功能实现(基于Android13)
- 【前端设计模式】之外观模式