【yolov5驾驶员和摩托车佩戴头盔的检测】
发布时间:2023年12月28日
yolov5驾驶员和摩托车佩戴头盔的检测
数据集和模型
数据和模型下载:
- yolov5摩托车佩戴头盔和驾驶员检测模型 yolov5-6.0-helmat-mortor-1225.zip
- yolov3摩托车佩戴头盔和驾驶员检测 pytorch-yolov3-9.6.0-helmet-motor-detect.zip
- yolov5摩托车佩戴头盔和驾驶员检测模型+pyqt界面+使用教程
- 数据集:YOLO算法摩托车驾驶员戴头盔检测motor-helmet-dataset-yolov5-05.zip
yolov5驾驶员和摩托车佩戴头盔的检测
Yolov5是一种先进的深度学习算法,用于目标检测任务,包括驾驶员和摩托车佩戴头盔的检测。这种算法可以在视频流或图像中识别出各种物体,并输出物体的位置和类别信息。
对于摩托车佩戴头盔的检测,Yolov5算法可以通过训练来识别图像中的人和摩托车,并判断是否佩戴头盔。这种检测方法可以用于安全监控系统,提醒驾驶员佩戴头盔,提高道路安全。
对于驾驶员检测,Yolov5算法可以通过训练来识别图像中的驾驶员,并输出驾驶员的位置和姿态信息。这种检测方法可以用于智能驾驶辅助系统,实现驾驶员状态监测、疲劳驾驶预警等功能,提高驾驶安全性。
Yolov5的原理基于深度学习和目标检测算法。它采用了一种称为“one-stage”的检测方法,这种方法的优势在于速度较快,因为它直接在图像上预测物体的位置和类别,而不需要像“two-stage”方法那样先进行候选区域选取。
Yolov5的主要组成部分包括:
- 输入端:
Yolov5在输入端使用了Mosaic数据增强、自适应锚框计算、自适应图片缩放等技术。Mosaic数据增强通过随机缩放、裁剪和排列四张图片,大大丰富了数据集,并可以增加小目标的检测能力。自适应锚框计算则是在训练时自适应地计算最佳锚框值,以提高检测精度。 - Backbone:
Yolov5在Backbone中使用了Focus结构和CSP结构。Focus结构通过改变通道和空间的信息流方式,增强了网络的特征提取能力。CSP结构则通过并行连接多个卷积层,提高了网络的深度和特征表示能力。 - Neck:
Yolov5在Neck端添加了FPN+PAN结构,用于多尺度特征融合,以提高对不同大小目标的检测能力。 - Head:
Yolov5在Head端改进了训练时的损失函数,使用GIOU_Loss,以及预测框筛选的DIOU_nms。GIOU_Loss考虑了预测框与真实框的IOU(交并比)和形状相似性,以提高检测精度。DIOU_nms则是一种非极大值抑制方法,可以去除多余的预测框,提高检测结果的准确性。
总的来说,Yolov5通过结合多种先进技术和结构,实现了高精度、高速度的目标检测能力,对于驾驶员和摩托车佩戴头盔的检测具有很好的应用价值。
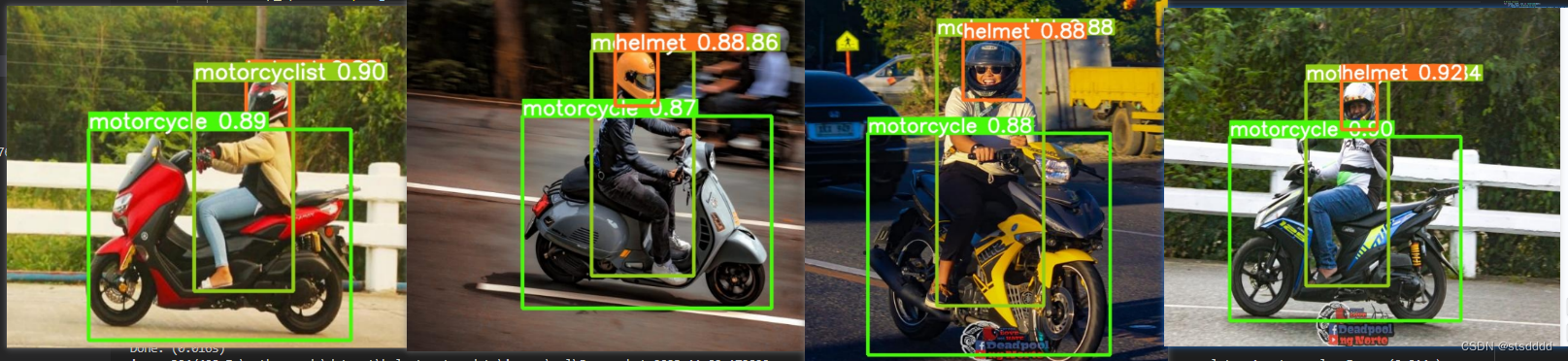
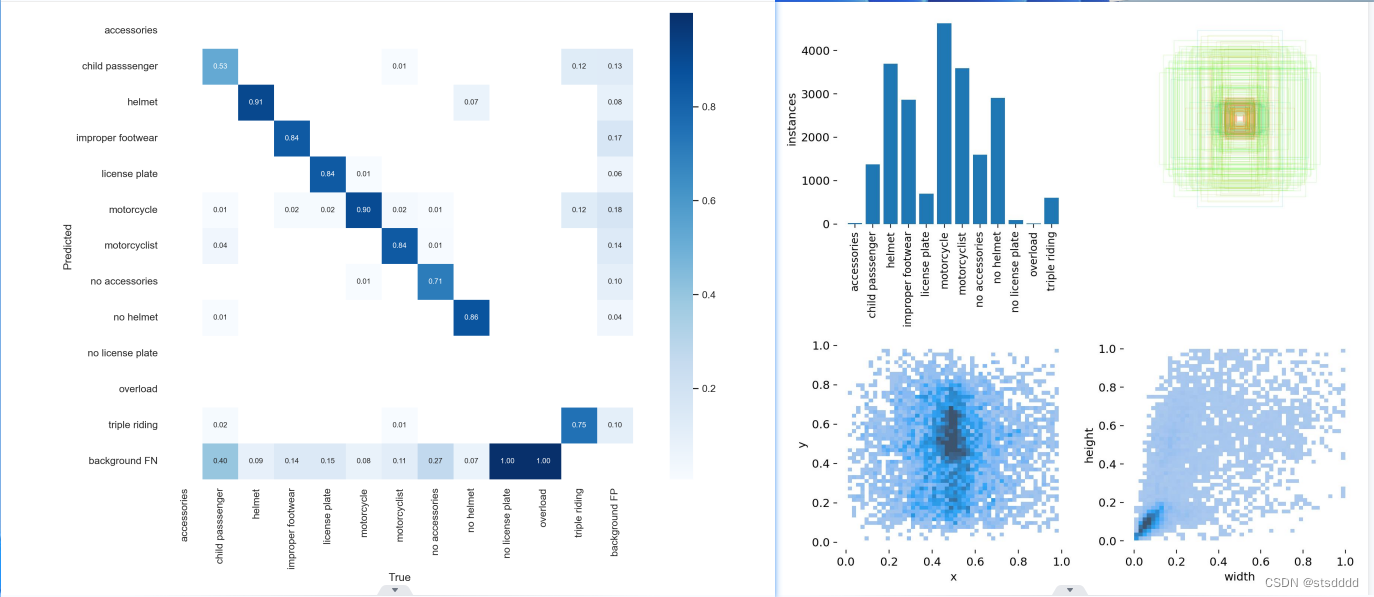
yolov5驾驶员和摩托车佩戴头盔的检测可视化结果
文章来源:https://blog.csdn.net/zhiqingAI/article/details/135257076
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 绝地求生:【PC】2024年1月商店更新
- 边缘计算的挑战和机遇
- Python实现AR协方差结构线性回归模型(GLSAR算法)项目实战
- JavaSE复习流程
- labelme的json转mask,实测有效
- 基于峰谷分时电价引导下的电动汽车充电负荷优化
- 怎么设计一个简单又直观的接口?
- Linux学习之网络编程3(高并发服务器)
- 【zlm】针对单个设备的码率的设置
- 【Python 网络爬虫】使用 urllib 爬取网页源码、图片和视频