【YOLO系列】 YOLOv4之(Hard)NMS、Soft NMS、DIOU NMS(附代码)
一、NMS
????????1、简述
????????NMS (Non-Maximum Suppression,非极大值抑制),是一种在计算机视觉领域常用的技术,用于处理基于深度学习的目标检测模型输出目标框的重叠问题。在目标检测任务中,算法通常会生成多个候选框来表示可能包含目标的区域。由于图像中的目标可能以不同的尺度和位置出现,这些候选框往往会有一定的重叠。在经典的NMS中,得分最高的检测框和其它检测框逐一计算出一个对应的IoU值,并将该值超过NMS threshold的框全部过滤掉。可以看出,在经典NMS算法中,IoU是唯一考量的因素。
????????2、步骤
????????NMS的实现步骤主要包括以下几个步骤:
????????1. 选择框和置信度:首先,选择某一类物体的所有检测框和对应的置信度,将这些框和置信度放到一个容器中。
????????2. 排序:然后,对所有检测框的置信度进行降序排序。
????????3. 选择置信度最高的框:取出当前置信度最高的框,记为proposal_max。
????????4. 计算IoU:然后,将proposal_max与容器中剩余的框逐一进行IoU(交并比)计算。IoU计算的结果反映了两个框的重叠程度。
????????5. 判断是否删除:如果某个框与proposal_max的IoU值大于设定的 threshold阈值,则将该框及其置信度从容器中删除。
????????6. 重复上述步骤:重复步骤3-5,直到容器中没有剩余的框或者proposal_max的置信度低于设定的阈值为止。
????????需要注意的是,在实现NMS时,阈值的选择是关键,阈值的选择会影响到目标检测算法的性能。通常需要通过实验来找到最优的阈值设置。
????????3、优缺点
????????(1)优点
? ? ? ? a. 提高准确率:通过抑制重叠程度较高的非最高置信度框,NMS可以有效减少冗余框,从而提高目标检测的准确率。
? ? ? ? b. 简化后续处理:重叠框问题会给后续处理带来困难,如物体跟踪和识别。NMS能够提供清晰、无重叠的框,简化后续处理流程。
????????(2)缺点
? ? ? ? a. 计算效率低:NMS需要进行排序和比较操作,时间复杂度较高,计算效率相对较低。对于大规模数据集,处理速度可能会成为瓶颈。
? ? ? ? b. 对小物体检测效果不佳:由于小物体的检测框相对较少,且容易与大物体发生重叠,导致NMS处理后可能会漏检一些小物体。
? ? ? ? c. 依赖阈值选择:NMS的效果高度依赖于阈值的选择。如果阈值设置不当,可能会导致误检或漏检的情况。
? ? ? ? d. 无法处理高密度目标的情况:当场景中存在大量密集分布的目标时,NMS处理的效果可能会受到限制。
? ? ? ? e. 未考虑框的置信度变化:NMS仅根据框的IoU值进行判断,未考虑框的置信度变化,可能会影响到算法的准确性。
????????4、代码实现
def nms(boxes, scores, threshold):
"""
非极大值抑制函数
:param boxes: 候选框的坐标,以左上角和右下角的形式表示,形状为(num_boxes, 4)
:param scores: 候选框的得分,形状为(num_boxes,)
:param threshold: NMS阈值
:return: 经过非极大值抑制后的框的索引
"""
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
# 将scores按照降序排序,返回是scores的索引值
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
inter = w * h
iou = inter / (areas[i] + areas[order[1:]] - inter)
idx = np.where(iou <= threshold)[0]
order = order[idx + 1]
return keep????????NMS在计算机视觉领域得到了广泛的应用,例如边缘检测、人脸检测、目标检测等。使用NMS的原因在于以目标检测为例,目标检测的过程中在同一目标的位置上会产生大量的候选框,这些候选框相互之间可能会有重叠,此时我们需要利用NMS找到最佳的目标边界框,消除冗余的边界框。
二、Soft NMS
????????论文下载:Improving Object Detection With One Line of Code
????????1、NMS存在的问题
????????非极大值抑制是目标检测的重要组成部分。首先,它根据检测框的得分对它们进行分类。选择得分最高的检测框M,并抑制与M有显著重叠(使用预定义阈值)的所有其他检测框。此过程递归地应用于剩余的框。根据算法的设计,如果一个对象位于预定义的重叠阈值内,则会导致miss。
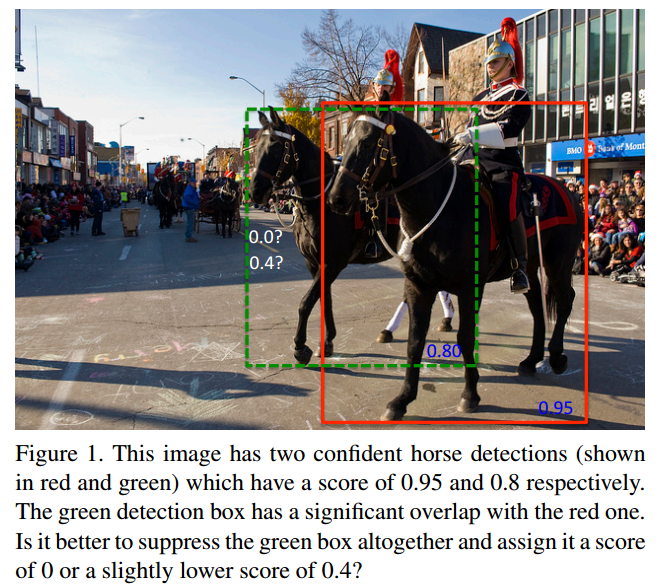
????????如上图中所示,两匹马的检测结果分别为0.8(绿色框)和0.95(红色框),但是如果按照传统NMS进行处理,首先选中检测得分最高的红色框,然后绿色框会因为与之重叠面积大于阈值而被删掉,这就导致了漏检。
????????另外,如果降低threshold值,就会出现大量检测框被误删,如果升高threshold值,则会导致出现大量的错检框或者重复框。
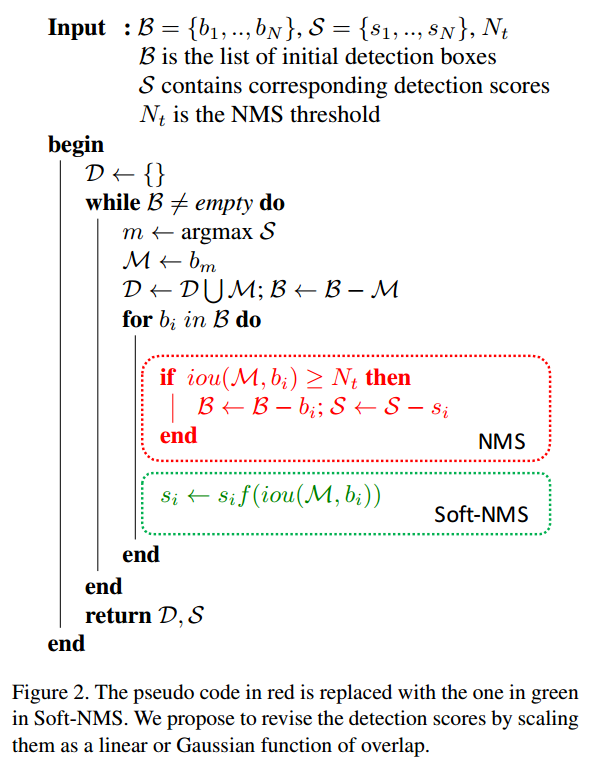
????????针对上述问题,作者提出了一种Soft NMS方法,只需改动一行代码即可有效改进传统的NMS算法。
????????2、Soft NMS简述
????????针对NMS的问题,作者对传统的贪婪NMS算法提出了一种单行修改,即将检测分数作为重叠的增加函数来降低,而不是像NMS那样将分数设置为零。直观地说,如果一个边界框与M有非常高的重叠,就应该给它一个非常低的分数,如果重叠很低,则可以保持原来的检测分数。由于Soft-NMS不需要任何额外的训练,并且易于实现,因此可以很容易地集成到目标检测中。
????????3、步骤
????????Soft NMS算法的中心思想:拒绝粗鲁的删除所有IOU大于threshold的框,而是采用降低其置信度来实现。
????????在文中,作者采用了一个线性函数作为衰减函数,当与M有更高重叠的检测框的分数时,应该衰减得更多,因为它们有更高的假阳性可能性,而远离M的候选框则不会受到影响。

????????然而,就重叠而言,它不是连续的,当达到NMS阈值时,会突然施加惩罚。而如果惩罚函数是连续的,那将是理想的,否则它可能导致检测排序列表的突然变化。一个连续的惩罚函数在两个候选框没有重叠时应该没有惩罚,在高重叠时应该有很高的惩罚。同样,当重叠度很低时,应该是逐渐增加惩罚,因为M不应该影响与它重叠度很低的候选框的分数。然而,当候选框bi与M的重叠接近于1时,bi应该被严重扣分。考虑到这一点,作者建议用高斯惩罚函数来更新剪枝步骤:
![]()
????????其实Soft NMS的计算步骤与NMS类似,Soft NMS的计算复杂度与传统的NMS相同,都是O(N2)。
????????4、优缺点
????????(1)优点
????????a. 提高了目标检测的准确率,特别是在处理重叠框问题时。
????????b. 算法复杂度与传统的NMS相同,但比NMS更加灵活,能够更有效地处理框之间的重叠问题。
????????c. 易于集成到任何物体检测流程中,不需要重新训练原有的模型。
????????d. 仅需要增加一个超参数sigma,阈值nms本来也有,iou是算出来的。
????????e. 在标准数据集上表现提升,例如PASCAL - VOC2007和MS-COCO。
????????(2)缺点
????????a. 无法处理高密度目标的情况:当场景中存在大量密集分布的目标时,Soft NMS处理的效果可能会受到限制。
????????b. 计算效率相对较低:Soft NMS需要进行排序和比较操作,时间复杂度较高,计算效率相对较低。在大规模数据集上,Soft NMS可能会成为性能瓶颈。
????????5、代码实现
def soft_nms(boxes, scores, sigma=0.5, Nt=0.5, threshold=0.5, method=2):
"""
soft nms
:param boxes: 候选框的坐标,以左上角和右下角的形式表示,形状为(num_boxes, 4)
:param scores: 候选框的得分,形状为(num_boxes,)
:param sigma:
:param Nt:
:param threshold:
:param method: method == 1: linear; 2: gaussian; other: original NMS
:return:
"""
N = boxes.shape[0]
pos = 0
maxscore = 0
maxpos = 0
for i in range(N):
maxscore = scores[i]
maxpos = i
# 获取第i个框的坐标值与分数
tx1 = boxes[i, 0]
ty1 = boxes[i, 1]
tx2 = boxes[i, 2]
ty2 = boxes[i, 3]
ts = scores[i]
pos = i + 1
# 获取最大的分数与框的索引
while pos < N:
if maxscore < scores[pos]:
maxscore = scores[pos]
maxpos = pos
pos = pos + 1
# 将最大值的框与对比框交换位置
boxes[i, 0] = boxes[maxpos, 0]
boxes[i, 1] = boxes[maxpos, 1]
boxes[i, 2] = boxes[maxpos, 2]
boxes[i, 3] = boxes[maxpos, 3]
scores[i] = scores[maxpos]
boxes[maxpos, 0] = tx1
boxes[maxpos, 1] = ty1
boxes[maxpos, 2] = tx2
boxes[maxpos, 3] = ty2
scores[maxpos] = ts
# 最大框的坐标值
tx1 = boxes[i, 0]
ty1 = boxes[i, 1]
tx2 = boxes[i, 2]
ty2 = boxes[i, 3]
ts = scores[i]
pos = i + 1
# NMS iterations, note that N changes if detection boxes fall below threshold
while pos < N:
x1 = boxes[pos, 0]
y1 = boxes[pos, 1]
x2 = boxes[pos, 2]
y2 = boxes[pos, 3]
s = scores[pos]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
iw = (min(tx2, x2) - max(tx1, x1) + 1)
if iw > 0:
ih = (min(ty2, y2) - max(ty1, y1) + 1)
if ih > 0:
# 求最大分数的框与第i个框的iou
ua = float((tx2 - tx1 + 1) * (ty2 - ty1 + 1) + area - iw * ih)
iou = iw * ih / ua
if method == 1: # linear
if iou > Nt:
weight = 1 - iou
else:
weight = 1
elif method == 2: # gaussian
weight = np.exp(-(iou * iou) / sigma)
else: # original NMS
if iou > Nt:
weight = 0
else:
weight = 1
scores[pos] = weight * s
print(scores)
# 如果框得分低于阈值,则通过交换最后一个框来丢弃该框
# update N
if scores[pos] < threshold:
boxes[pos, 0] = boxes[N - 1, 0]
boxes[pos, 1] = boxes[N - 1, 1]
boxes[pos, 2] = boxes[N - 1, 2]
boxes[pos, 3] = boxes[N - 1, 3]
scores[pos] = scores[N - 1]
N = N - 1
pos = pos - 1
pos = pos + 1
keep = [i for i in range(N)]
return keep
三、DIOU NMS
论文下载:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
????????1、简述
????????DIOU NMS是一个改进的NMS算法,它不仅考虑了两个框的IoU(交并比)值,还考虑了两个框的中心点之间的距离,以决定是否保留一个框。
????????DIOU具体内容详见:【YOLO系列】 Smooth L1 Loss、IOU、GIOU、DIOU、CIOU(附代码实现)
????????2、步骤
????????DIOU NMS与NMS实现的步骤相同,只是把IOU的计算换成了DIOU计算

????????3、代码实现
def Diou_nms(boxes, scores, threshold=0.3):
"""
非极大值抑制函数
:param boxes: 候选框的坐标,以左上角和右下角的形式表示,形状为(num_boxes, 4)
:param scores: 候选框的得分,形状为(num_boxes,)
:param threshold: NMS阈值
:return: 经过非极大值抑制后的框的索引
"""
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
b1_w = x2 - x1
b1_h = y2 - y1
center_x1 = x1 + b1_w / 2
center_y1 = y1 + b1_h / 2
# 将scores按照降序排序,返回是scores的索引值
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
inter = w * h
iou = inter / (areas[i] + areas[order[1:]] - inter)
out_max_x = np.maximum(x2[i], x2[order[1:]])
out_max_y = np.maximum(y2[i], y2[order[1:]])
out_min_x = np.minimum(x1[i], x1[order[1:]])
out_min_y = np.minimum(y1[i], y1[order[1:]])
inter_diag = (center_x1[i] - center_x1[order[1:]]) ** 2 + (center_y1[i] - center_y1[order[1:]]) ** 2
outer_x = np.maximum((out_max_x - out_min_x), 0)
outer_y = np.maximum((out_max_y - out_min_y), 0)
outer_diag = (outer_x ** 2) + (outer_y ** 2)
diou = iou - inter_diag / outer_diag
idx = np.where(diou <= threshold)[0]
order = order[idx + 1]
return keep本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【unity小技巧】两种办法解决FPS游戏枪或者人物穿墙穿模问题
- 电脑应用程序与授权搬家工具之数据迁移软件大全
- [bat批处理] 一键清理 Windows10 系统垃圾
- Python入门知识点分享——(十二)for循环与while循环
- 家庭在线记账理财管理系统PHP源码,附带系统安装教程
- 【FPGA】分享一些FPGA高速信号处理相关的书籍
- OR-2601,高度隔离光耦,替代HCPL2601、EL2601等
- 代理和适配器模式(结构型设计模式)的 C++ 代码示例模板
- 水雾妙用,商业空间中的水离子水壁炉创意应用
- mysql的读写分离