重磅!首创准空气集成波导天线设计,这家厂商重构4D毫米波雷达
在新一轮智能驾驶感知方案升级的浪潮下,中国厂商再一次实现了4D毫米波雷达的重要突围。
《高工智能汽车》获悉,领瞳科技首创了准空气集成波导(AIW)天线技术,成为了国内率先在波导天线领域实现重要破局的中国本土厂商。同时,领瞳科技还推出了波导4D毫米波雷达中央计算系统、波导4D毫米波雷达等全面领先的产品,全面定义了下一代4D毫米波雷达。
过去,国产毫米波雷达大多数在BSD盲区监测等安全要求相对较低的车载毫米波雷达领域实现国产化突围。但伴随着智能驾驶感知方案的升级,中国厂商已经相继在4D毫米波雷达、ACC/AEB前向雷达等赛道实现量产突围,在国内市场的细分领域与传统雷达巨头同台竞技。
4D毫米波雷达增加了目标高度维度数据的探测和解析,实现了距离、速度、方位、高度四个维度的信息感知,并且无惧天气与光线影响,曾经一度被认为是高阶智能驾驶系统必不可少的传感器。
但目前市面上常见的4D毫米波雷达方案,主要通过增加天线数量、增加发射通道等方式来提升性能,且大多数还需要额外配备成本较高的FPGA来进行数据处理,同时还需要多级联方案,导致成本一直很难持续下降。
因此,如何有效解决规模化量产痛点与难题,并提供性能、成本等全方面领先的4D毫米波雷达方案,成为了中国4D毫米波雷达厂商决战未来市场的核心关键。
波导天线迎来重大突破
领瞳科技创始人兼CEO张龙兵表示,破除4D毫米波雷达性能与规模化量产难题,首先需要从天线入手。在这其中,波导天线已经成为毫米波雷达天线阵元设计的未来趋势。
天线是毫米波雷达最重要的收发部件之一,主要负责发射和接收信号。资料显示,过去毫米波雷达主要采用的是微带天线,在24GHz低频时,微带天线损耗小,天线增益可以满足要求。但在77GHz高频时,微带天线的损耗会明显增大,尤其是多通道的4D雷达,采用微带天线方案的雷达在大角度下天线增益衰减较大,且存在多天线阵列一致性较差的问题。
因此,采用多芯片级联方案的4D毫米波雷达,由于拥有更多数量的发射与接收天线,若仍然采用微带天线的设计方案,雷达的设计和天线的馈线走线复杂度大幅提升,且天线阵列只能在X-Y方向布局,从而导致雷达面积过大、成本显著增加等问题。
与之形成明显对比的是,波导天线可以在X-Y-Z三个方向展开,具备低损耗、设计更加紧凑等优势,可以在有效缩减天线和雷达的面积的基础上,进行高增益的天线单元设计,并且实现高效率的馈电网络,从而提高雷达的探测距离和获得更高的分辨率。
另外,需要特别提及的是,和微带天线集成在高频电路板不同,波导天线还有一个天然的优势就是可以独立测试天线性能,也可以更换不同的天线阵列对应同一块雷达硬件,这为波导天线标准化和雷达产品差异化提供便捷。
“将波导天线做成标准化的器件之后,只需要通过改变天线的阵列方式以及算法适配,即可实现4D雷达的差异化开发。”张龙兵补充表示,这样一来,就可以大幅节约开发成本。
《高工智能汽车》了解到,目前车载波导天线主要有缝隙波导天线和腔体波导天线两大主流品种。其中,腔体波导天线的规模化量产还存在材料成本高、工艺效益低等问题,而常规的缝隙波导同样还存在材料成本和工艺等问题。
除此之外,由于波导天线的设计难度高、材料成本高及工艺等问题,全球仅有少数几家欧洲厂商牢牢占据着波导天线市场,国内几乎没有企业可以提供波导天线产品。
领瞳科技从成立之初就开始围绕波导天线技术进行深度布局,目前已经首创了准空气集成波导(AIW)天线技术。据了解,领瞳科技独创的准空气集成波导(AIW)天线设计灵感来源于基片集成波导(SIW),但却比基片集成波导拥有传输损耗更低、带宽更宽、更高的功率承载能力以及可靠的结构设计等优势。而相比同尺寸的微带天线,准空气集成波导(AIW)天线则实现了大约有5dB的增益提升。
领瞳科技准空气集成波导天线
总体来看,领瞳科技推出的准空气集成波导天线拥有以下几大特色优势:
其一是,领瞳科技的准空气集成波导天线具备独特的波导通道设计,在满足优异性能的情况下,也有利于雷达的整体散热;
其二,准空气集成波导天线层与层之间的特殊组装方式,有利于量产时的组装公差冗余;
其三,准空气集成波导与PCB连接处采用了特殊的波导结构设计,对PCB上的电子元件和干扰信号具有屏蔽的效果;
最后,也是最为核心的优势在于,准空气集成波导厚度可以做到包含转接口部分整体小于3.5mm,如果加上需要的电路板上的元件高度,整体厚度可以控制在小于5mm,相较于其他类型的波导天线比如腔体波导等,在尺寸、厚度和工艺上具有明显的优势,这种优势不仅可以大幅减少毫米波雷达的尺寸,还可以带来成本上的优势。
目前,领瞳科技已经完成了波导天线设计、天线仿真、模具和工艺的全流程验证,已经具备了从需求、设计、仿真、验证到量产供货的全周期能力。这就意味着,国产企业在波导天线领域实现了重要的突破,这将彻底改变国内波导天线落后欧洲的局面。
重新定义下一代4D毫米波雷达
当前,基于Transformer的BEV智驾大模型已经成为了智能驾驶感知的主流范式。在AI大模型的助力下,摄像头、激光雷达、毫米波雷达、超声波雷达等不同传感器的数据信息特征可以通过算法融合,并将多传感器收集到的图像信息转换成3D视角,从而提高感知和预测的准确率。
业内人士一致认为,4D毫米波雷达更有利于实现多传感器的前融合和点云融合,可以降低差异度、漏检率等。不过,4D毫米波雷达的通道数多、数据量大,对雷达传感器端的算力要求很高,大大提高了雷达传感器的成本,同时无法提供与视觉进行前融合的数据。
“要适应NOA等高阶智能驾驶的应用需求,4D毫米波雷达必须进行软硬分离的设计。”?张龙兵表示,4D毫米波雷达的点云密度比较高,同时原始数据还需要做FFT、超分辨算法等计算,对于芯片的算力要求比较高。
因此,4D毫米波雷达的数据处理需要交由中央计算系统(域控制器)完成,可以大幅降低端侧数据的处理要求。
基于此,领瞳科技基于黑芝麻智能华山二号A1000芯片推出了波导4D雷达中央计算系统,支持一颗双级联或者四级联4D毫米波雷达原始数据的输出,支持多达16路高清摄像头、多路以太网接口,可以拓展支持10G以太网。
同时,领瞳科技的中央计算4D雷达算法和软件还可以支持多款不同的ADAS域控制器和中央计算平台,解决了毫米波雷达原始数据传输带宽、数据传输和处理过程的延迟等问题,助力了4D毫米波雷达从边缘计算向中央计算时代迈进。
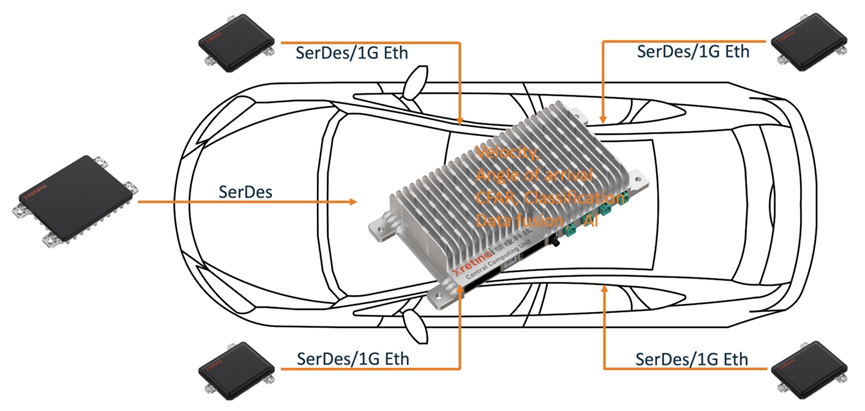
领瞳科技中央计算4D雷达系统
资料显示,华山二号A1000内置5颗Cadence Tensilica Vision P6 DSP,每颗DSP运算速度高达800MHz,在处理大量的摄像头数据的同时,通常会空闲2颗以上Vision P6 DSP。而领瞳科技便是充分利用了这两颗闲置的DSP,实现了FFT、CFAR等信号的实时处理。
以双级联4D毫米波雷达原始数据输入为例,在不影响处理器主要算力处理多路摄像头数据的基础上,Vision P6 DSP处理每帧雷达原始数据的运算时间实时可以达到小于30ms,轻松实现雷达每秒处理超过30帧的能力,实现点云输出每秒30帧以上,性能远超目前市场上4D雷达输出仅20帧或以下的点云输出能力。
“30帧的输出达到和目前摄像头输出一样的帧率,完全可以实现摄像头和雷达的帧同步,进而实现雷达和摄像头的数据融合和深度学习。”?张龙兵介绍,基于波导4D雷达中央计算系统,自动驾驶系统可以像使用传统4D雷达来访问点云或目标数据,同时自动驾驶系统可以轻松访问雷达的原始数据和RAD张量数据等,实现进一步的深度学习算法。
过去,毫米波雷达厂商主要提供的是软硬一体的“黑盒子”模式,绝大多数主机厂都没有接触毫米波雷达的原始数据,导致主机厂很难实现雷达和摄像头等传感器的数据级融合,更无法实现雷达数据在自动驾驶处理器中进行深度学习算法的闭环迭代。
现如今,领瞳科技通过将4D毫米波雷达的信号处理算法放在域控制器当中,实现了雷达软硬件的分离,无疑为自动驾驶系统打开了雷达数据驱动雷达性能迭代的大门,重新定义了下一代4D毫米波雷达。
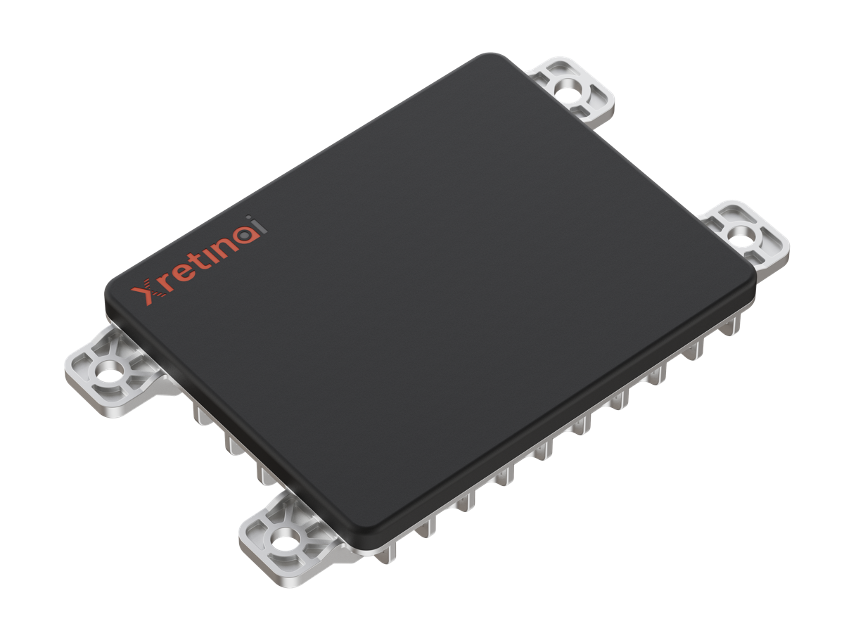
领瞳科技波导4D毫米波前向雷达
据了解,领瞳科技定位于智能感知系统技术引领者,可以提供全栈的波导4D毫米波雷达中央计算系统解决方案,产品包括波导天线、波导4D毫米波雷达、中央计算平台、雷达算法与软件等。
高工智能汽车研究院预测数据显示,随着L2及L2+持续处于市场增长的高速期,到2025年,毫米波雷达搭载总量将超过3500万颗/年,2020-2025年复合年增长率接近30%。这就意味着,4D毫米波雷达的替代市场空间巨大,在波导天线、雷达算法与软件等下一代技术上面进行了深入布局的厂商,无疑可以抢得先发优势。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Tomcat9运行 tomcat9w.exe 提示“指定服务未安装”
- 【软件测试学习笔记4】HTML入门
- CCC数字钥匙设计【NFC】--NFC通信之APDU & TLV
- [设计模式 Go实现] 行为型~观察者模式
- linux使用jvm配置启动jar脚本
- Java设计模式详解超详细(含示例代码)
- JavaScript 之 promise
- 贪心算法part04 860柠檬水找零 406根据身高重建队列
- ML: 2-3 neural network 代码理解
- 文心一言 VS 讯飞星火 VS chatgpt (177)-- 算法导论13.3 6题