【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1
【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1
前言
本系列文件主要有以下目标和内容:
- 为系统、传感器和执行器创建
HardwareInterface - 以URDF文件的形式创建机器人描述
- 加载配置并使用启动文件启动机器人
- 控制RRBot的两个关节(两旋转关节机器人)
- 六自由度机器人的控制
- 实现机器人的控制器切换策略
- 使用
ros2_control中的关节限制和传输概念
一、RR机器人
RRBot( Revolute-Revolute Manipulator Robot)是一个简单的3连杆,2关节的机械臂,我们将使用它来演示各种功能。
它本质上是一个双倒立摆,并在模拟器中演示了一些有趣的控制概念,最初是为Gazebo教程介绍的。
创建description pkg
这里主要是完成机器人描述文件的创建,各个轴的物理尺寸、模型信息,各个轴的关节链接方式、链接点。
mkdir ~/ros2_control_demos
cd ~/ros2_control_demos
ros2 pkg create --build-type ament_cmake ros2_control_demo_description
# 文件结构
$ tree ros2_control_demo_description/
ros2_control_demo_description/
├── CMakeLists.txt
├── package.xml
└── rrbot
├── rviz
│ └── rrbot.rviz
└── urdf
├── rrbot.materials.xacro
└── rrbot_description.urdf.xacro
# CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(ros2_control_demo_description)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
install(
DIRECTORY rrbot/urdf rrbot/rviz
DESTINATION share/${PROJECT_NAME}/rrbot
)
ament_package()
# packages.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>ros2_control_demo_description</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="https://blog.csdn.net/Bing_Lee">dev</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<exec_depend>joint_state_publisher_gui</exec_depend>
<exec_depend>robot_state_publisher</exec_depend>
<exec_depend>rviz2</exec_depend>
</package>
# rrbot.rviz
Panels:
- Class: rviz_common/Displays
Help Height: 87
Name: Displays
Property Tree Widget:
Expanded: ~
Splitter Ratio: 0.5
Tree Height: 1096
- Class: rviz_common/Selection
Name: Selection
- Class: rviz_common/Tool Properties
Expanded:
- /2D Goal Pose1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz_common/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz_default_plugins/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Class: rviz_default_plugins/RobotModel
Collision Enabled: false
Description File: ""
Description Source: Topic
Description Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /robot_description
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
camera_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
camera_link_optical:
Alpha: 1
Show Axes: false
Show Trail: false
hokuyo_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
link1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
link2:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
tool_link:
Alpha: 1
Show Axes: false
Show Trail: false
world:
Alpha: 1
Show Axes: false
Show Trail: false
Mass Properties:
Inertia: false
Mass: false
Name: RobotModel
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz_default_plugins/Interact
Hide Inactive Objects: true
- Class: rviz_default_plugins/MoveCamera
- Class: rviz_default_plugins/Select
- Class: rviz_default_plugins/FocusCamera
- Class: rviz_default_plugins/Measure
Line color: 128; 128; 0
- Class: rviz_default_plugins/SetInitialPose
Covariance x: 0.25
Covariance y: 0.25
Covariance yaw: 0.06853891909122467
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /initialpose
- Class: rviz_default_plugins/SetGoal
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /goal_pose
- Class: rviz_default_plugins/PublishPoint
Single click: true
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /clicked_point
Transformation:
Current:
Class: rviz_default_plugins/TF
Value: true
Views:
Current:
Class: rviz_default_plugins/Orbit
Distance: 8.443930625915527
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0.0044944556429982185
Y: 1.0785865783691406
Z: 2.4839563369750977
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Pitch: 0.23039916157722473
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 5.150422096252441
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 1379
Hide Left Dock: false
Hide Right Dock: false
Selection:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 2560
X: 0
Y: 1470
# rrbot_description.urdf.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="rrbot" params="parent prefix *origin">
<!-- Constants for robot dimensions -->
<xacro:property name="mass" value="1" /> <!-- arbitrary value for mass -->
<xacro:property name="width" value="0.1" /> <!-- Square dimensions (widthxwidth) of beams -->
<xacro:property name="height1" value="2" /> <!-- Link 1 -->
<xacro:property name="height2" value="1" /> <!-- Link 2 -->
<xacro:property name="height3" value="1" /> <!-- Link 3 -->
<xacro:property name="axel_offset" value="0.05" /> <!-- Space btw top of beam and the each joint -->
<joint name="${prefix}base_joint" type="fixed">
<xacro:insert_block name="origin" />
<parent link="${parent}"/>
<child link="${prefix}base_link" />
</joint>
<!-- Base Link -->
<link name="${prefix}base_link">
<collision>
<origin xyz="0 0 ${height1/2}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height1}"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 ${height1/2}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height1}"/>
</geometry>
<material name="orange"/>
</visual>
</link>
<joint name="${prefix}joint1" type="continuous">
<parent link="${prefix}base_link"/>
<child link="${prefix}link1"/>
<origin xyz="0 ${width} ${height1 - axel_offset}" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<dynamics damping="0.7"/>
</joint>
<!-- Middle Link -->
<link name="${prefix}link1">
<collision>
<origin xyz="0 0 ${height2/2 - axel_offset}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height2}"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 ${height2/2 - axel_offset}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height2}"/>
</geometry>
<material name="yellow"/>
</visual>
</link>
<joint name="${prefix}joint2" type="continuous">
<parent link="${prefix}link1"/>
<child link="${prefix}link2"/>
<origin xyz="0 ${width} ${height2 - axel_offset*2}" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<dynamics damping="0.7"/>
</joint>
<!-- Top Link -->
<link name="${prefix}link2">
<collision>
<origin xyz="0 0 ${height3/2 - axel_offset}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height3}"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 ${height3/2 - axel_offset}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height3}"/>
</geometry>
<material name="orange"/>
</visual>
</link>
<joint name="${prefix}tool_joint" type="fixed">
<origin xyz="0 0 1" rpy="0 0 0" />
<parent link="${prefix}link2"/>
<child link="${prefix}tool_link" />
</joint>
<!-- Tool Link -->
<link name="${prefix}tool_link">
</link>
</xacro:macro>
</robot>
# rrbot.materials.xacro
<?xml version="1.0"?>
<!--
Copied from ROS1 example -
https://github.com/ros-simulation/gazebo_ros_demos/blob/kinetic-devel/rrbot_description/urdf/materials.xacro
-->
<robot>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material>
<material name="blue">
<color rgba="0.0 0.0 0.8 1.0"/>
</material>
<material name="green">
<color rgba="0.0 0.8 0.0 1.0"/>
</material>
<material name="grey">
<color rgba="0.2 0.2 0.2 1.0"/>
</material>
<material name="orange">
<color rgba="${255/255} ${108/255} ${10/255} 1.0"/>
</material>
<material name="brown">
<color rgba="${222/255} ${207/255} ${195/255} 1.0"/>
</material>
<material name="red">
<color rgba="0.8 0.0 0.0 1.0"/>
</material>
<material name="yellow">
<color rgba="1.0 1.0 0.0 1.0"/>
</material>
<material name="white">
<color rgba="1.0 1.0 1.0 1.0"/>
</material>
</robot>
创建demos pkg
这个包用于引导编译所有相关依赖包,按照下边格式填好即可。
cd ~/ros2_control_demos
ros2 pkg create --build-type ament_cmake ros2_control_demos
# 文件结构
$ tree ros2_control_demos/
ros2_control_demos/
├── CMakeLists.txt
└── package.xml
# CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(ros2_control_demos)
# find dependencies
find_package(ament_cmake REQUIRED)
ament_package()
# package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>ros2_control_demos</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="https://blog.csdn.net/Bing_Lee">dev</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<exec_depend>ros2_control_demo_example_1</exec_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
二、创建controller相关
创建example pkg
cd ~/ros2_control_demos
ros2 pkg create --build-type ament_cmake ros2_control_demo_example_1
这里涉及hardware部分的实现,具体如下:
# rrobot.hpp
// Copyright 2020 ros2_control Development Team
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#ifndef ROS2_CONTROL_DEMO_EXAMPLE_1__RRBOT_HPP_
#define ROS2_CONTROL_DEMO_EXAMPLE_1__RRBOT_HPP_
#include <memory>
#include <string>
#include <vector>
#include "hardware_interface/handle.hpp"
#include "hardware_interface/hardware_info.hpp"
#include "hardware_interface/system_interface.hpp"
#include "hardware_interface/types/hardware_interface_return_values.hpp"
#include "rclcpp/macros.hpp"
#include "rclcpp_lifecycle/node_interfaces/lifecycle_node_interface.hpp"
#include "rclcpp_lifecycle/state.hpp"
#include "ros2_control_demo_example_1/visibility_control.h"
namespace ros2_control_demo_example_1
{
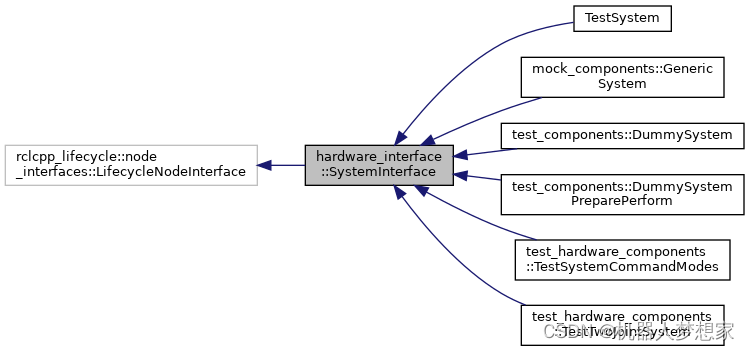
class RRBotSystemPositionOnlyHardware : public hardware_interface::SystemInterface
{
public:
RCLCPP_SHARED_PTR_DEFINITIONS(RRBotSystemPositionOnlyHardware);
// 从机器人的URDF解析的数据中解析硬件接口.
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
hardware_interface::CallbackReturn on_init(
const hardware_interface::HardwareInfo & info) override;
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
hardware_interface::CallbackReturn on_configure(
const rclcpp_lifecycle::State & previous_state) override;
// 导出此硬件接口的所有状态接口.
// 必须根据为配置传入的硬件信息创建和传输状态接口.
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
std::vector<hardware_interface::StateInterface> export_state_interfaces() override;
// 导出此硬件接口的所有命令接口.
// 命令接口必须根据为配置传入的硬件信息创建和传输.
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
std::vector<hardware_interface::CommandInterface> export_command_interfaces() override;
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
hardware_interface::CallbackReturn on_activate(
const rclcpp_lifecycle::State & previous_state) override;
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
hardware_interface::CallbackReturn on_deactivate(
const rclcpp_lifecycle::State & previous_state) override;
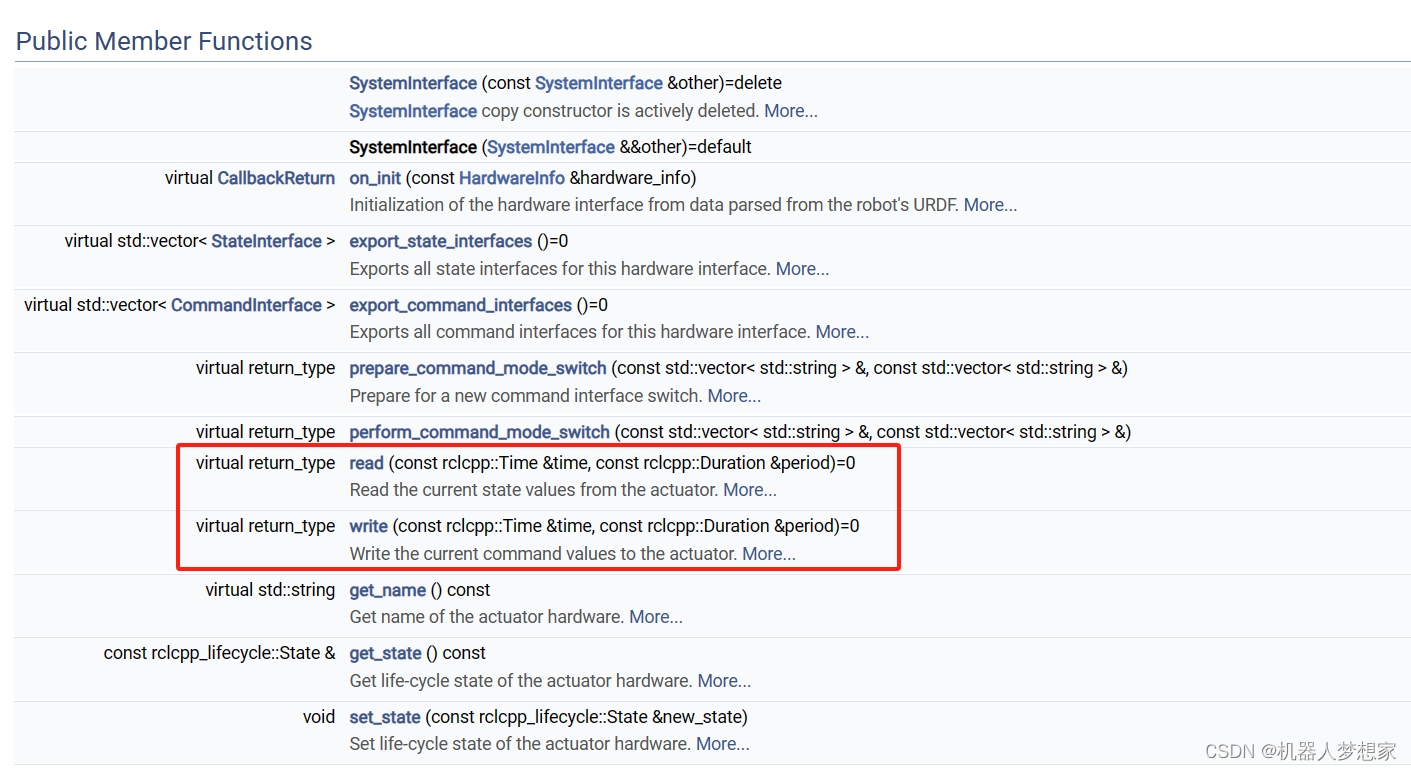
// 从执行器读取当前状态值.
// 使用接口读取硬件当前状态,注意硬件状态应该是实时更新的.
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
hardware_interface::return_type read(
const rclcpp::Time & time, const rclcpp::Duration & period) override;
// 将当前指令值写入执行器.
// 使用接口将最新值设置到硬件中.
ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
hardware_interface::return_type write(
const rclcpp::Time & time, const rclcpp::Duration & period) override;
private:
// Parameters for the RRBot simulation
double hw_start_sec_;
double hw_stop_sec_;
double hw_slowdown_;
// Store the command for the simulated robot
std::vector<double> hw_commands_;
std::vector<double> hw_states_;
};
} // namespace ros2_control_demo_example_1
#endif // ROS2_CONTROL_DEMO_EXAMPLE_1__RRBOT_HPP_
// Copyright 2021 ros2_control Development Team
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
/* This header must be included by all rclcpp headers which declare symbols
* which are defined in the rclcpp library. When not building the rclcpp
* library, i.e. when using the headers in other package's code, the contents
* of this header change the visibility of certain symbols which the rclcpp
* library cannot have, but the consuming code must have inorder to link.
*/
#ifndef ROS2_CONTROL_DEMO_EXAMPLE_1__VISIBILITY_CONTROL_H_
#define ROS2_CONTROL_DEMO_EXAMPLE_1__VISIBILITY_CONTROL_H_
// This logic was borrowed (then namespaced) from the examples on the gcc wiki:
// https://gcc.gnu.org/wiki/Visibility
#if defined _WIN32 || defined __CYGWIN__
#ifdef __GNUC__
#define ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT __attribute__((dllexport))
#define ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT __attribute__((dllimport))
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT __declspec(dllexport)
#define ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT __declspec(dllimport)
#endif
#ifdef ROS2_CONTROL_DEMO_EXAMPLE_1_BUILDING_DLL
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT
#endif
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC_TYPE ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
#define ROS2_CONTROL_DEMO_EXAMPLE_1_LOCAL
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_EXPORT __attribute__((visibility("default")))
#define ROS2_CONTROL_DEMO_EXAMPLE_1_IMPORT
#if __GNUC__ >= 4
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC __attribute__((visibility("default")))
#define ROS2_CONTROL_DEMO_EXAMPLE_1_LOCAL __attribute__((visibility("hidden")))
#else
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC
#define ROS2_CONTROL_DEMO_EXAMPLE_1_LOCAL
#endif
#define ROS2_CONTROL_DEMO_EXAMPLE_1_PUBLIC_TYPE
#endif
#endif // ROS2_CONTROL_DEMO_EXAMPLE_1__VISIBILITY_CONTROL_H_
attribute((visibility(“default”))) 是 GCC(GNU 编译器集合)中的一个特性,它允许程序员控制特定部分的代码的可见性。在 C 和 C++ 中,代码的可见性是指其他源文件能否访问特定的函数或变量。
当你在一个函数或变量声明中使用 attribute((visibility(“default”))),表示这个函数或变量默认对所有其他源文件可见。也就是说,这个函数或变量可以在其他源文件中被调用,或者被其他源文件中的变量间接引用。
这种特性在编写库和模块时非常有用,因为它允许程序员更灵活地组织和隐藏代码。例如,你可以创建一个库,其中包含一些默认可见的函数和变量,这些函数和变量可以被其他源文件调用,但不被直接暴露给用户。这种方式可以隐藏库的内部实现细节,同时仍然允许用户使用库的功能。
需要注意的是,attribute((visibility(“default”))) 并不是 C 或 C++ 标准的一部分,而是 GCC 编译器的一个特性。这意味着不是所有的编译器都会支持这个特性,特别是那些不支持 GCC 的编译器。此外,不同的编译器可能对 attribute((visibility)) 的行为有微小的差异,所以在使用这个特性时需要特别小心。
# robot.cpp
// Copyright 2020 ros2_control Development Team
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include "ros2_control_demo_example_1/rrbot.hpp"
#include <chrono>
#include <cmath>
#include <limits>
#include <memory>
#include <vector>
#include "hardware_interface/types/hardware_interface_type_values.hpp"
#include "rclcpp/rclcpp.hpp"
namespace ros2_control_demo_example_1
{
hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_init(
const hardware_interface::HardwareInfo & info)
{
if (
hardware_interface::SystemInterface::on_init(info) !=
hardware_interface::CallbackReturn::SUCCESS)
{
return hardware_interface::CallbackReturn::ERROR;
}
// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
hw_start_sec_ = stod(info_.hardware_parameters["example_param_hw_start_duration_sec"]);
hw_stop_sec_ = stod(info_.hardware_parameters["example_param_hw_stop_duration_sec"]);
hw_slowdown_ = stod(info_.hardware_parameters["example_param_hw_slowdown"]);
// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
hw_states_.resize(info_.joints.size(), std::numeric_limits<double>::quiet_NaN());
hw_commands_.resize(info_.joints.size(), std::numeric_limits<double>::quiet_NaN());
// 校验状态和命令接口是否只有一个
for (const hardware_interface::ComponentInfo & joint : info_.joints)
{
// RRBotSystemPositionOnly 只有一种状态和命令(state,command)
if (joint.command_interfaces.size() != 1)
{
RCLCPP_FATAL(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),
"Joint '%s' has %zu command interfaces found. 1 expected.", joint.name.c_str(),
joint.command_interfaces.size());
return hardware_interface::CallbackReturn::ERROR;
}
if (joint.command_interfaces[0].name != hardware_interface::HW_IF_POSITION)
{
RCLCPP_FATAL(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),
"Joint '%s' have %s command interfaces found. '%s' expected.", joint.name.c_str(),
joint.command_interfaces[0].name.c_str(), hardware_interface::HW_IF_POSITION);
return hardware_interface::CallbackReturn::ERROR;
}
if (joint.state_interfaces.size() != 1)
{
RCLCPP_FATAL(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),
"Joint '%s' has %zu state interface. 1 expected.", joint.name.c_str(),
joint.state_interfaces.size());
return hardware_interface::CallbackReturn::ERROR;
}
if (joint.state_interfaces[0].name != hardware_interface::HW_IF_POSITION)
{
RCLCPP_FATAL(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),
"Joint '%s' have %s state interface. '%s' expected.", joint.name.c_str(),
joint.state_interfaces[0].name.c_str(), hardware_interface::HW_IF_POSITION);
return hardware_interface::CallbackReturn::ERROR;
}
}
return hardware_interface::CallbackReturn::SUCCESS;
}
hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_configure(
const rclcpp_lifecycle::State & /*previous_state*/)
{
// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Configuring ...please wait...");
// configure 前延时
for (int i = 0; i < hw_start_sec_; i++)
{
rclcpp::sleep_for(std::chrono::seconds(1));
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "%.1f seconds left...",
hw_start_sec_ - i);
}
// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
// 在切换状态到configure时总是初始化所有值
for (uint i = 0; i < hw_states_.size(); i++)
{
hw_states_[i] = 0;
hw_commands_[i] = 0;
}
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Successfully configured!");
return hardware_interface::CallbackReturn::SUCCESS;
}
std::vector<hardware_interface::StateInterface>
RRBotSystemPositionOnlyHardware::export_state_interfaces()
{
std::vector<hardware_interface::StateInterface> state_interfaces;
for (uint i = 0; i < info_.joints.size(); i++)
{
state_interfaces.emplace_back(hardware_interface::StateInterface(
info_.joints[i].name, hardware_interface::HW_IF_POSITION, &hw_states_[i]));
}
return state_interfaces;
}
std::vector<hardware_interface::CommandInterface>
RRBotSystemPositionOnlyHardware::export_command_interfaces()
{
std::vector<hardware_interface::CommandInterface> command_interfaces;
for (uint i = 0; i < info_.joints.size(); i++)
{
command_interfaces.emplace_back(hardware_interface::CommandInterface(
info_.joints[i].name, hardware_interface::HW_IF_POSITION, &hw_commands_[i]));
}
return command_interfaces;
}
hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_activate(
const rclcpp_lifecycle::State & /*previous_state*/)
{
// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Activating ...please wait...");
for (int i = 0; i < hw_start_sec_; i++)
{
rclcpp::sleep_for(std::chrono::seconds(1));
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "%.1f seconds left...",
hw_start_sec_ - i);
}
// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
// command和state开始时应该是相同的
for (uint i = 0; i < hw_states_.size(); i++)
{
hw_commands_[i] = hw_states_[i];
}
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Successfully activated!");
return hardware_interface::CallbackReturn::SUCCESS;
}
hardware_interface::CallbackReturn RRBotSystemPositionOnlyHardware::on_deactivate(
const rclcpp_lifecycle::State & /*previous_state*/)
{
// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Deactivating ...please wait...");
for (int i = 0; i < hw_stop_sec_; i++)
{
rclcpp::sleep_for(std::chrono::seconds(1));
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "%.1f seconds left...",
hw_stop_sec_ - i);
}
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Successfully deactivated!");
// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
return hardware_interface::CallbackReturn::SUCCESS;
}
hardware_interface::return_type RRBotSystemPositionOnlyHardware::read(
const rclcpp::Time & /*time*/, const rclcpp::Duration & /*period*/)
{
// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Reading...");
for (uint i = 0; i < hw_states_.size(); i++)
{
// 模拟RRBot的运动
hw_states_[i] = hw_states_[i] + (hw_commands_[i] - hw_states_[i]) / hw_slowdown_;
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Got state %.5f for joint %d!",
hw_states_[i], i);
}
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Joints successfully read!");
// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
return hardware_interface::return_type::OK;
}
hardware_interface::return_type RRBotSystemPositionOnlyHardware::write(
const rclcpp::Time & /*time*/, const rclcpp::Duration & /*period*/)
{
// BEGIN: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Writing...");
for (uint i = 0; i < hw_commands_.size(); i++)
{
// 仿真发送命令到hardware
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Got command %.5f for joint %d!",
hw_commands_[i], i);
}
RCLCPP_INFO(
rclcpp::get_logger("RRBotSystemPositionOnlyHardware"), "Joints successfully written!");
// END: 这一段是出测试使用考虑,请勿拷贝至实际生产环境
return hardware_interface::return_type::OK;
}
} // namespace ros2_control_demo_example_1
#include "pluginlib/class_list_macros.hpp"
PLUGINLIB_EXPORT_CLASS(
ros2_control_demo_example_1::RRBotSystemPositionOnlyHardware, hardware_interface::SystemInterface)
hardware_interface::SystemInterface类的说明:1
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface类的说明:2
也可通过上一篇博客《 ROS2 LifecycleNode讲解及实例》中的介绍学习。
三、测试运行

总结
先把当前完成部分更新到博客,运行结果截图如上所示,这两天继续完善。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- DQL-排序查询
- BACCM业务模型核心概念
- FreeRTOS之队列操作
- TypeError: Cannot read properties of undefined (reading ‘row‘)原因及解决办法
- 互联网加竞赛 python+大数据校园卡数据分析
- Github2023-12-22开源项目日报 Top10
- LiveGBS流媒体平台GB/T28181功能-基础配置接入控制白名单黑名单配置控制设备安全接入设备单独配置接入密码
- 18.云原生可观测性之kubesphere监控报警系统使用实战
- Python FastApi连接oracle进行查询
- EtcdKeeperFyne连接etcd工具及相关gcc编译问题踩坑处理