Mobile Aloha:WidowX-250s(6DOF)机械臂教程.安装ROS和功能包(包含ros1 - noetic的安装 )
首先进入到aloha的conda环境:
conda activate aloha
在安装了ros1 noetic 的基础上,可以用鱼香ROS一键安装:
打开鱼香ROS的网址,使用“一键安装系列”,网址链接:
在liunx的终端输入:
wget http://fishros.com/install -O fishros && . fishros
随后参考以下链接进行WidowX-250s(6DOF)机械臂的xsarm_amd64_install.sh功能包安装:
sudo apt install curl
curl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.sh
chmod +x xsarm_amd64_install.sh
./xsarm_amd64_install.sh -d noetic
-----------------------------------------------------------------------------------------------------------
也可以前往github上来下载资源包,网址链接:
https://github.com/Interbotix/interbotix_ros_manipulators/tree/main
下载解压后找到对应路径下的文件:
?interbotix_ros_manipulators /?interbotix_ros_xsarms / install / amd64 / xsarm_amd64_install.sh
保存在home目录下:

有了xsarm_amd64_install.sh这个文件,继续在liunx的终端输入:
chmod +x xsarm_amd64_install.sh
./xsarm_amd64_install.sh -d noetic
依次输入3次yes

------------------------------------------------------------------------------------------------------------
!!!在安装过程中,遇到了一些问题,汇总如下:
问题1
Invoking "cmake" failed
[ERROR] Failed to build Interbotix Arm ROS Packages.
[ERROR] Interbotix Installation Failed!

解决方案:
pip install empy==3.3.4
随后删除xsarm_amd64_install.sh编译生成的home目录下的interbotix_ws这个文件,重新进行:
chmod +x xsarm_amd64_install.sh
./xsarm_amd64_install.sh -d noetic
问题2
ImportError: "from catkin_pkg.package import parse_package" failed: No module named 'catkin_pkg'
Make sure that you have installed "catkin_pkg", it is up to date and on the PYTHONPATH.
解决方案:
pip install catkin_pkg
随后删除xsarm_amd64_install.sh编译生成的home目录下的interbotix_ws这个文件,重新进行:
chmod +x xsarm_amd64_install.sh
./xsarm_amd64_install.sh -d noetic
问题3
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
? Could not find a package configuration file provided by "dynamixel_sdk"
? with any of the following names:
??? dynamixel_sdkConfig.cmake
??? dynamixel_sdk-config.cmake
? Add the installation prefix of "dynamixel_sdk" to CMAKE_PREFIX_PATH or set
? "dynamixel_sdk_DIR" to a directory containing one of the above files.? If
? "dynamixel_sdk" provides a separate development package or SDK, be sure it
? has been installed.
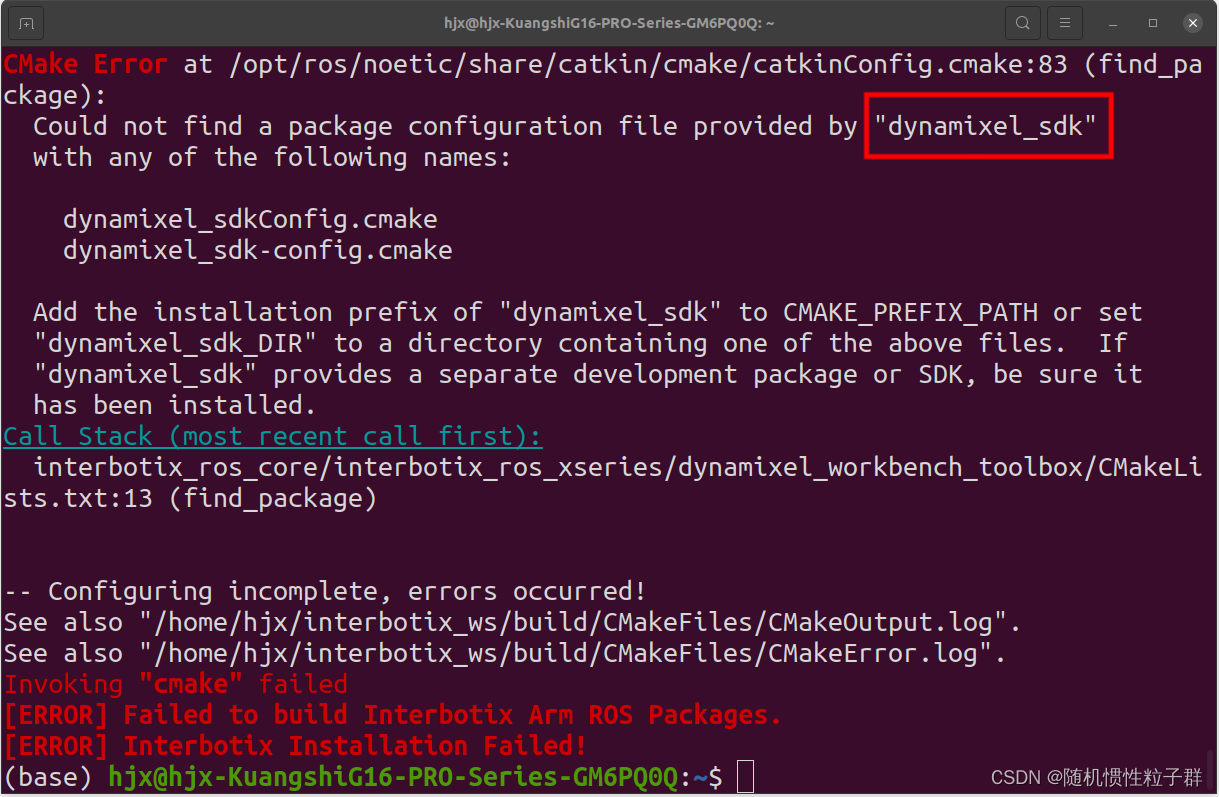
解决方案:
sudo rosdep init
rosdep update

随后删除xsarm_amd64_install.sh编译生成的home目录下的interbotix_ws这个文件,重新进行:
chmod +x xsarm_amd64_install.sh
./xsarm_amd64_install.sh -d noetic
直到linux的终端输出显示如下才算成功:
Interbotix Arm ROS Packages built successfully!
Setting up Environment Variables...
Installation complete, took 129 seconds in total.
NOTE: Remember to reboot the computer before using the robot!

备注:此博客为Mobile Aloha该项目而创建,期间调试代码时遇到一个报错:
wrapt的最新版本过高(默认安装的版本是1.16.0),需要安装以下版本号:
pip install wrapt==1.11.2 ## or higher
还有一个需要用到的包是pyrealsense2
要安装 Intel RealSense D400 系列摄像头的 Python 绑定库 pyrealsense2,您可以使用 pip 命令进行安装。以下是在终端中执行安装的步骤:
运行以下命令来安装 pyrealsense2:
pip install pyrealsense2
如果您使用的是 Python3,则可以使用以下命令:
pip3 install pyrealsense2
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- C语言运算——自加自减运算
- 利用ERA5数据集计算GNSS站点上方的PWV(ERA5 PWV)
- Docker--Dockerfile自定义镜像
- 安捷伦E5071B网络分析仪8.5GHz
- C++不懂就问:std::vector的push_back和emplace_back函数的差别?
- sublime如何一个窗口打开多个文件
- Linux 学习
- 12.31信号位宽转换(整数,非整数),时钟分频(奇数,偶数,任意小数,占空比),自动售货机(1,2),游戏机
- 大模型增量预训练经验总结(1)
- ubuntu22下安装minconda