arduino舵机练习
发布时间:2023年12月23日
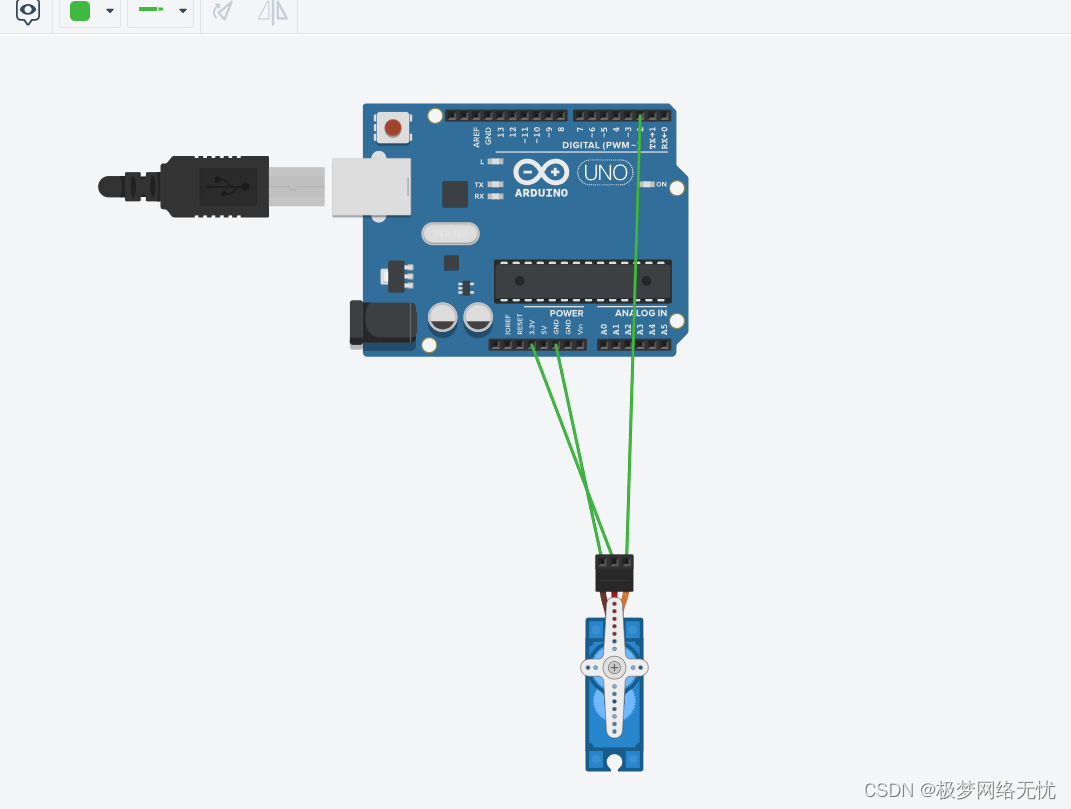
接地线gnd和电源线5v;信号线链接任意数字针脚
// C++ code
//
#include <Servo.h> //引入舵机库
Servo servo_2; //定义舵机
void setup()
{
servo_2.attach(2, 500, 2500);
/*
servo_2.attach(2, 500, 2500)
servo_2 对象的一个方法调用,其中包含三个参数:
2:表示要将 servo_2 连接到数字引脚 2 上。不同的 Arduino 板可能具有不同的引脚布局和功能,因此在使用 attach() 方法时,请确保选择与你的硬件兼容的数字引脚。
500:表示伺服电机的最小脉冲宽度(单位为微秒)。这个值决定了伺服电机能够旋转的最小角度。
2500:表示伺服电机的最大脉冲宽度(单位为微秒)。这个值决定了伺服电机能够旋转的最大角度。
通过调用 servo_2.attach(2, 500, 2500),你可以将 servo_2 对象配置为连接到数字引脚 2,并设置了伺服电机的最小和最大脉冲宽度范围。这样,你就可以使用 servo_2.write() 方法来控制该引脚输出的 PWM 信号,从而控制伺服电机的角度。
请注意,不同的伺服电机可能需要不同的最小和最大脉冲宽度范围,你可以根据你所使用的具体伺服电机的规格来调整这些参数。
*/
}
void loop()
{
servo_2.write(50);//旋转50
servo_2.Read();//读取值
delay(10); // Delay a little bit to improve simulation performance
}
文章来源:https://blog.csdn.net/wangzhae/article/details/135163035
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 信息收集 - 谷歌hack
- 安徽省暨合肥市“希望工程·梦想计划”小盖茨机器人捐赠启动仪式举行
- YZ系列工具之YZ04:文本批量替换使用说明文档
- Honewell 扫描枪设置自动回车
- 【服务器】服务器管理 - cockpit开启
- Winform RDLC报表(数据库连接、报表函数使用、动态表头)
- 0级表空间后,又有0级全库备份,再1级表空间备份,xtts还认吗?
- Java 反射
- 【Python百宝箱】图像魔法师:Python数据可视化的艺术之旅
- [玩转AIGC]LLaMA2训练自己的中文故事撰写神器(content generation)