3D视觉-激光三角测量法的概述和原理
发布时间:2023年12月28日
激光三角测量法概述
激光三角测量法是一种通过图像采集系统采集被测物表面漫反射的激光轮廓,进而基于设备已知的相对位置通过算法处理,获得被测物表面的三维轮廓数据,进而还原目标物体三维空间信息的方法。
激光三角测量法原理
激光三角法位移测量的原理是,用一束激光以某一角度聚焦在被测物体表面,然后从另一角度对物体表面上的激光光斑进行成像,物体表面激光照射点的位置高度不同,所接受散射或反射光线的角度也不同,用
CCD
光电探测器测出光斑像的位置,就可以计算出主光线的角度,从而计算出物体表面激光照射点的位置高度。当物体沿激光线方向发生移动时,测量结果就将发生改变,从而实现用激光测量物体的位移。由于激光出射光线和反射(散射)光线构成一个三角形,对光斑位移的计算,几何三角和激器运用其中,所以称此方法为激光三角法测距。
 ?
?
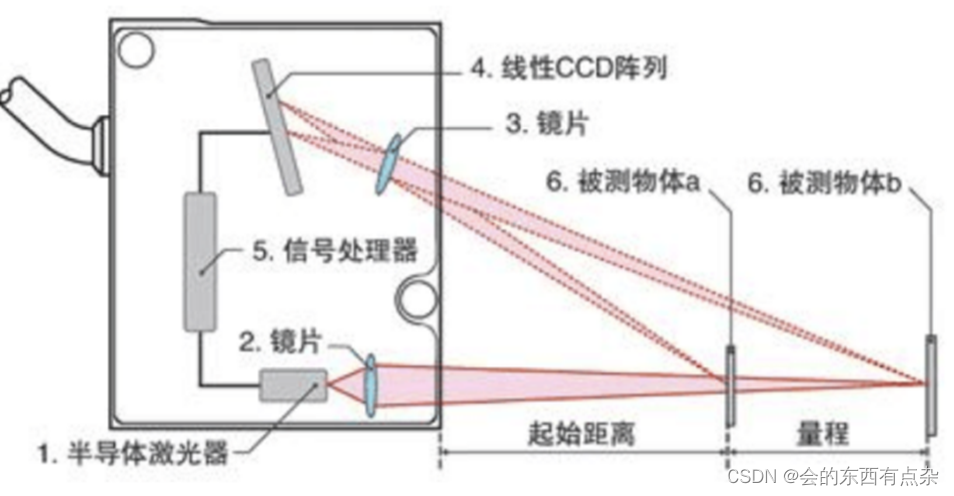
采用激光三角原理和回波分析原理进行非接触位置、位移测量的精密传感器,?广泛应用于位置、位移?、厚度、半径、形状、振动、距离等几何量的工业测量。半导体激光器
1
被镜片
2
聚焦到被测物体
6
。反射光被镜片
3
收集,投射到
CCD
阵列
4
上;信号处理器
5
通过三角函数计算阵列
4
上的光点位置得到距物体的距离。
文章来源:https://blog.csdn.net/qq_20660115/article/details/135262448
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 《设计模式的艺术》笔记 - 享元模式
- Xmind 网页端登录及多端同步
- Mybatis之逆向工程
- 在vue项目中使用天地图,点击可打点,搜索打点组件封装
- 使用Python爬虫实战篇1-写一个抓取百度热搜榜新闻的爬虫并提供fastapi调用
- P2383 狗哥玩木棒 约翰玩木棒
- 【面试合集】说说提高微信小程序的应用速度的手段有哪些?
- ESP32网络开发实例-Web串口(WebSerial)
- 网络调试 UDP1,开发板用静态地址-入门5
- 洛谷P5707 【深基2.例12】上学迟到(C语言)