开集目标检测-标签提示目标检测大模型(吊打YOLO系列-自动化检测标注)
开集目标检测是目前计算机视觉领域中一个重要的研究方向,它的主要目的是在不依赖于预先定义的类别标签下,实现对图像中出现的不同目标的识别和检测。为了实现开集目标检测,研究者们提出了一系列创新性的算法和技术,其中标签提示目标检测大模型是一个值得关注的研究方向。
以下是该模型的主要特点和优势:
1. 借助标签提示信息,提高检测准确率:
标签提示目标检测大模型通过利用已知的目标标签信息来指导网络学习,从而提高了检测准确率。例如,在训练过程中,模型可以利用标签提示信息来区分不同的目标,并学习到它们的特征和属性,进而更好地进行检测和识别。
2. 实现开集目标检测:
标签提示目标检测大模型可以实现开集目标检测,即在未知类别的情况下,能够对出现的目标进行有效的检测和识别。这种能力对于应对未知场景和新出现的目标具有极大的价值,可应用于各种实际场景中。
3. 多任务学习:
标签提示目标检测大模型可以同时处理多个任务,例如目标检测、目标分类、目标分割等。这种多任务学习的能力可以加强网络的综合性能和泛化能力,使得模型在各种应用场景下具有更好的效果和表现。
4. 结合了传统检测算法和深度学习技术:
标签提示目标检测大模型结合了传统的检测算法和深度学习技术,充分利用了它们的优势,同时避免了它们各自的不足。这种融合的方法可以提高检测准确率和稳定性,并且对于处理复杂场景和多种目标类型具有更好的适应性。
总之,标签提示目标检测大模型是一种有效的开集目标检测方法,具有诸多优势和特点,在未来的研究和应用中将会发挥重要的作用。
背景
大多数现有的对象检测模型都经过训练来识别一组有限的预先确定的类别。将新类添加到可识别对象列表中需要收集和标记新数据,并从头开始重新训练模型,这是一个耗时且昂贵的过程。该大模型的目标是开发一个强大的系统来检测由人类语言输入指定的任意对象,而无需重新训练模型,也称为零样本检测。该模型只需提供文本提示即可识别和检测任何物体。

- 关键可以生成标签,这样也不用标注了
- 同时能实现任何类别的识别
- 目标检测功能
- 学习可用
-

模型架构
Grounding?DINO架构的核心在于它能够有效地弥合语言和视觉之间的差距。这是通过采用双流架构来实现的——使用 Swin Transformer 等文本主干提取多尺度图像特征,并通过 NLP 模型 BERT 等文本主干提取文本特征。

模型架构
这两个流的输出被馈送到特征增强器中,用于将两组特征转换成单个统一的表示空间。特征增强器包括多个特征增强器层。可变形自注意力用于增强图像特征,常规自注意力用于文本特征增强器。

#特征增强层
Groundi旨在从输入文本指定的图像中检测对象。为了有效地利用输入文本进行对象检测,使用语言引导的查询选择来从图像和文本输入中选择最相关的特征。这些查询指导解码器识别图像中对象的位置,并根据文本描述为它们分配适当的标签。?
?
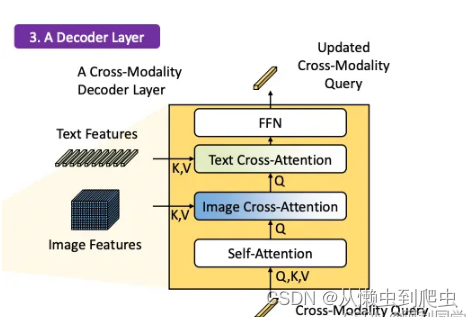
跨模态解码器
然后使用跨模态解码器来集成文本和图像模态特征。跨模态解码器通过一系列关注层和前馈网络处理融合特征和解码器查询来进行操作。这些层允许解码器有效地捕获视觉和文本信息之间的关系,使其能够细化对象检测并分配适当的标签。在此步骤之后,模型继续进行对象检测的最后步骤,包括边界框预测、特定于类的置信度过滤和标签分配。、
代码运行
执行
在下一节中,我们将演示开放集对象检测。在这里,我们将使用预先训练的 Grounding 模型通过摄像头检测“带盖玻璃”(如文本提示)。
安装接地 DINO 🦕
首先,包含 PyTorch 实现和 Grounding 预训练模型的github 存储库被克隆到您的本地目录。在克隆 github 存储库的同一目录中创建一个名为 main.py 的文件。该文件将包含通过摄像头输入执行 Grounding 模型的主脚本。首先通过添加以下命令导入相关库和 Grounding 模块。代码的最后两行导入所需的推理模块。
import modules
import os
import cv2
import numpy as np
from PIL import Image
import groundingdino.datasets.transforms as T
from groundingdino.util.inference import load_model, load_image, predict, annotate
QQ767172261安装环境
pip install -r requirements.txt
?下载bert-base-uncased
https://huggingface.co/models
找到后,下载后放到本地,否则代码会出现异常
运行
python demo/inference_on_a_image.py -c 配置文件 Ground/config/Grounding_OGC.py -p 权重:.pth
-i 输入 input -o输出路径 -t "标签:car" --cpu-only
结果


?

怎么样,结果还不错把
关键可以生成标签,这样也不用标注了
已经把批量生成.json .xml文件脚本完成!
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- ALVR 编译 windwos && android [Streamer &Client]
- BL120DT 电力协议转换网关
- VS配置PCO相机SDK环境
- GBASE南大通用分享LET语句
- 1.1 数据库概述
- 哈希表与哈希算法(Python系列30)
- Java刷题篇——单链表练习题上
- springboot集成springdoc-openapi(模拟前端请求)
- 在 hibernate 中 getCurrentSession 和 openSession 的区别是什么?
- P3704数字表格(莫比乌斯反演)