ros2humble使用gazebo加载urdf文件的基本流程
发布时间:2023年12月23日
1:编写xacro文件
2:把xacro文件转换为urdf文件
3:使用gazebo建立sdf文件fine,也就是ros1里面的world文件,现在后缀是sdf文件了
4:把urdf文件转换为sdf文件good
5:把修改后的good.sdf文件稍微修改后插入fine.sdf文件中
6:使用launch文件加载sdf文件
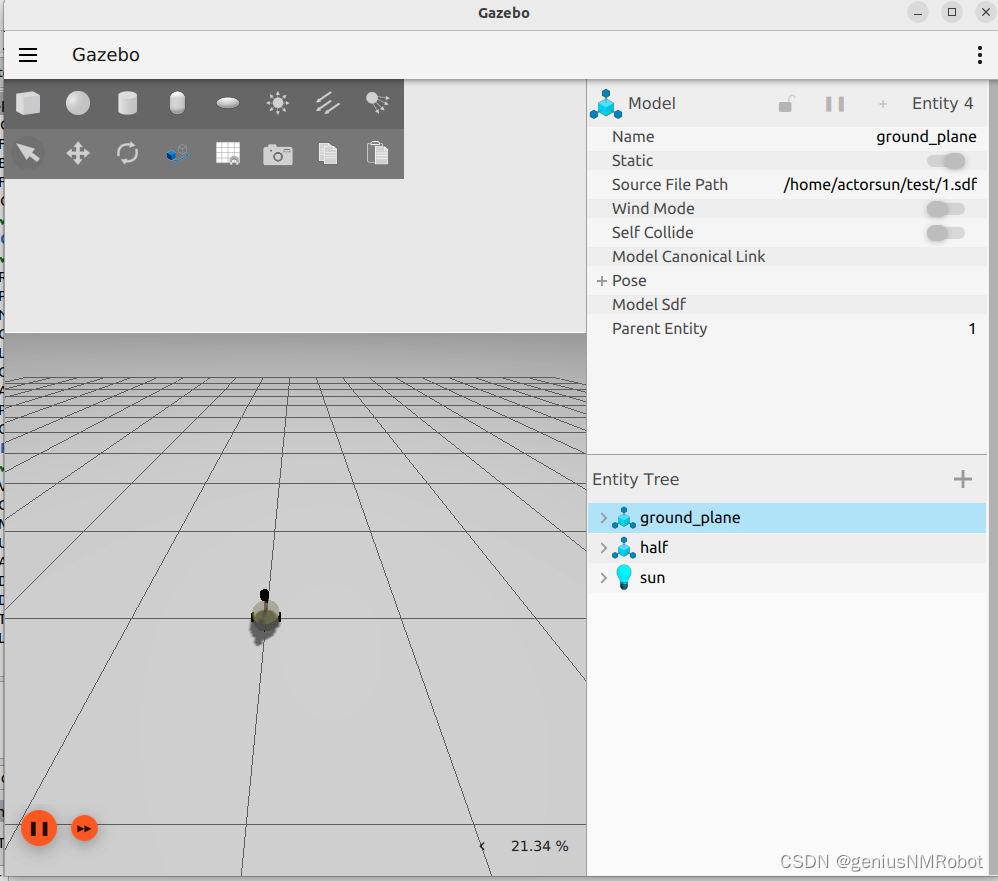
?
?这个文件只用于加载模型
<launch>
<group>
<let name="robot_description" value="$(command 'xacro $(find-pkg-share gazebo_pkg)/urdf/total.xacro')"/>
<node pkg="rviz2" exec="rviz2" name="rviz2" output="screen"/>
<node pkg="robot_state_publisher" exec="robot_state_publisher" name="robot_state_publisher">
<param name="robot_description" value="$(var robot_description)" type="str"/>
</node>
<node exec="parameter_bridge" pkg="ros_gz_bridge"/>
<node name="joint_state_publisher" exec="joint_state_publisher" pkg="joint_state_publisher"/>
<include file="$(find-pkg-share ros_gz_sim)/launch/gz_sim.launch.py">
<arg name="gz_args" value="-v 4 -r /home/actorsun/test/1.sdf"/>
</include>
<!--
<node pkg="ros_gz_bridge" exec="parameter_bridge" args="-urdf -model half -param robot_description"/>
-->
</group>
</launch>
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135174567
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 山海鲸:金融机构数据管理的得力助手
- reactor的原理与实现
- Joulwatt(杰华特) 代理 JW1530 SOT23-3 TO-92 一站式配单
- RabbitMQ之幂等性问题处理
- 【快刊录用】Springer旗下2区,1个21天录用,12天见刊!
- 网络安全-防御保护01
- AI软件开发:探索原理、挑战与未来趋势
- 实战:如何正确在LINUX8.0上安装Oracle 11.2.0.4
- 设计模式之策略模式
- 淘宝商品详情数据接口指南(taobao.item_get)