使用官方标定工具Dynamic Calibrator对RealSense D435i进行标定(二)
工具的安装教程可以看我的上一篇博文:Ubuntu 18.04安装Dynamic Calibration software for the Intel? RealSense? D400 Series Cameras(一)
使用教程参考user guide:https://www.intel.com/content/www/us/en/support/articles/000026723/emerging-technologies/intel-realsense-technology.html
The calibration process requires a special target, either printed or phone target. Please refer to Appendix for target setup details.
感觉很神奇的是,可以用手机作为标定物!ios和安卓(需要谷歌商店)都有app可以下载,博主的手机是huawei的(而且是曲面屏),没办法了
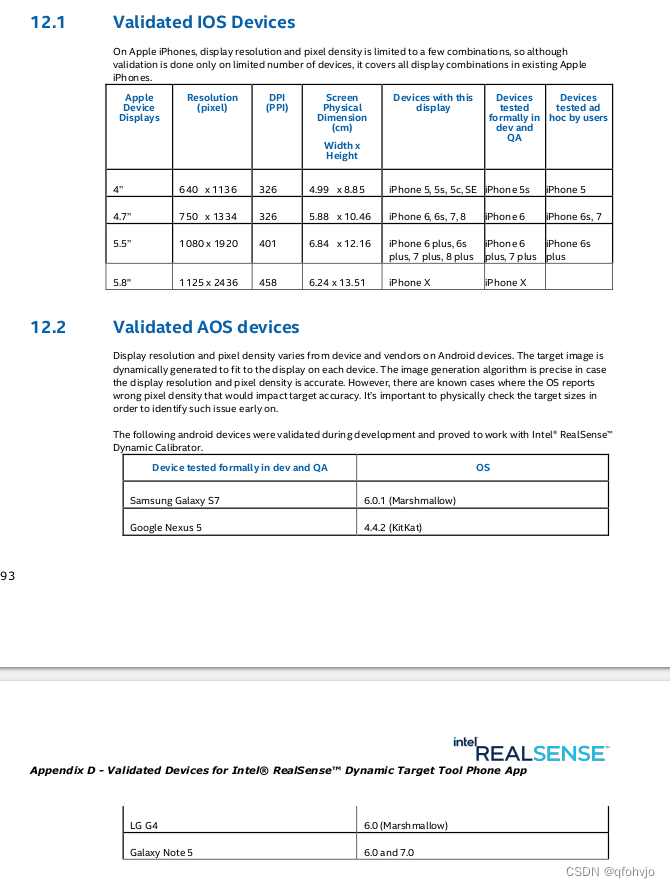
以下机型可尝试:
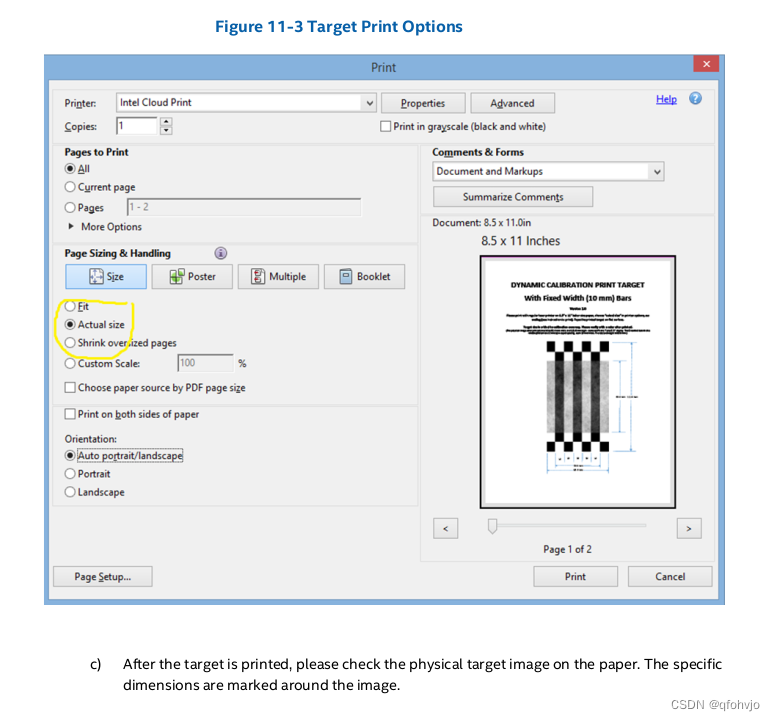
关于打印target的一些提示...
打印纸的链接:http://www.intelrealsense.com/download/18533
我打印回来了!打印的时候选择实际大小就可以
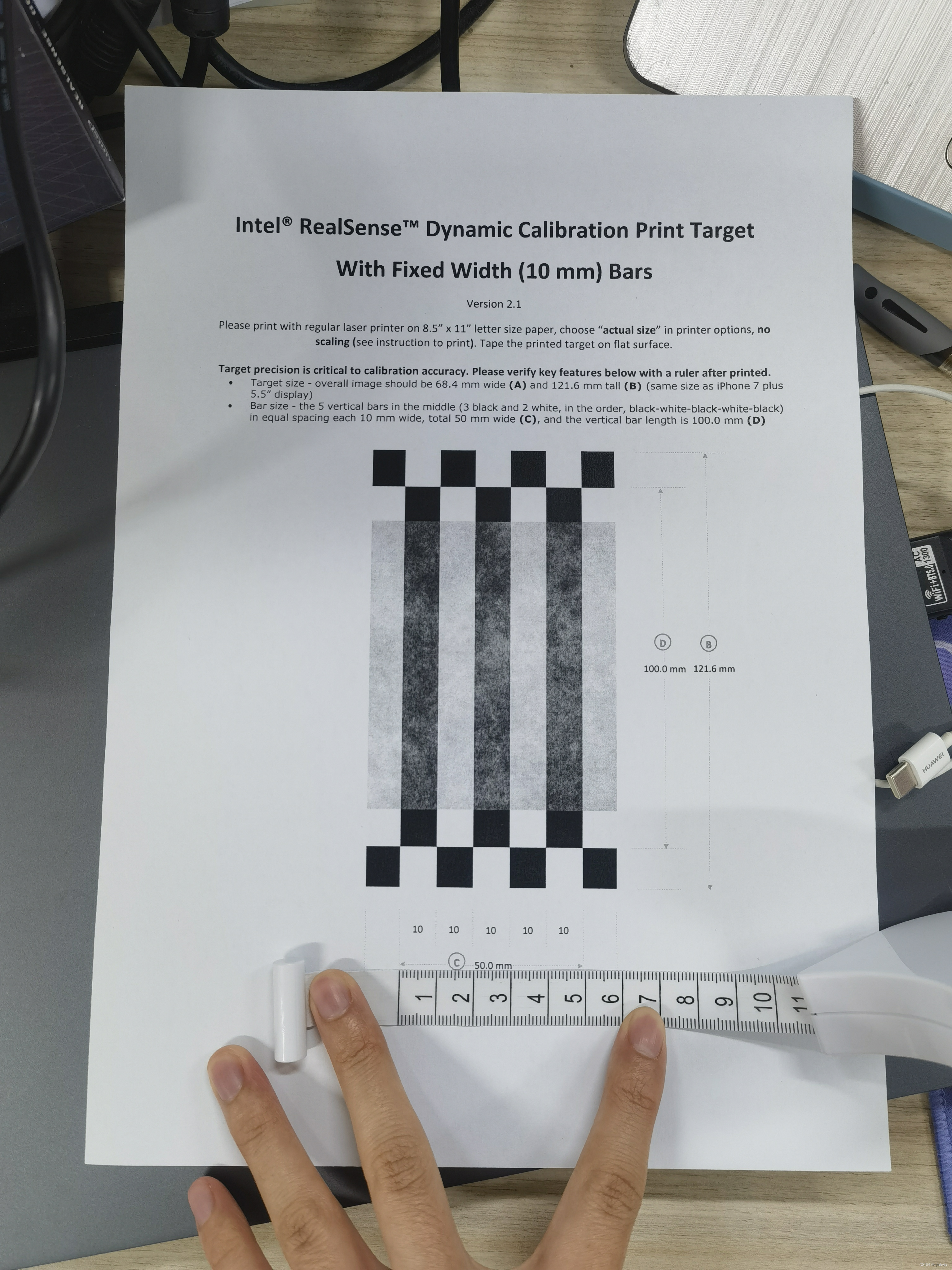
Setup the printed target on a flat surface so that the bars are vertical (use a roller or some other object, to ensure the target is flat on the surface. Tape the printed target on the flat surface after confirming that the target is flat).
将打印的目标设置在平坦的表面上,使条垂直(使用滚筒或其他物体,以确保目标在表面上是平坦的。在确认目标是平坦的后,将打印目标用胶带粘在平坦表面上)。
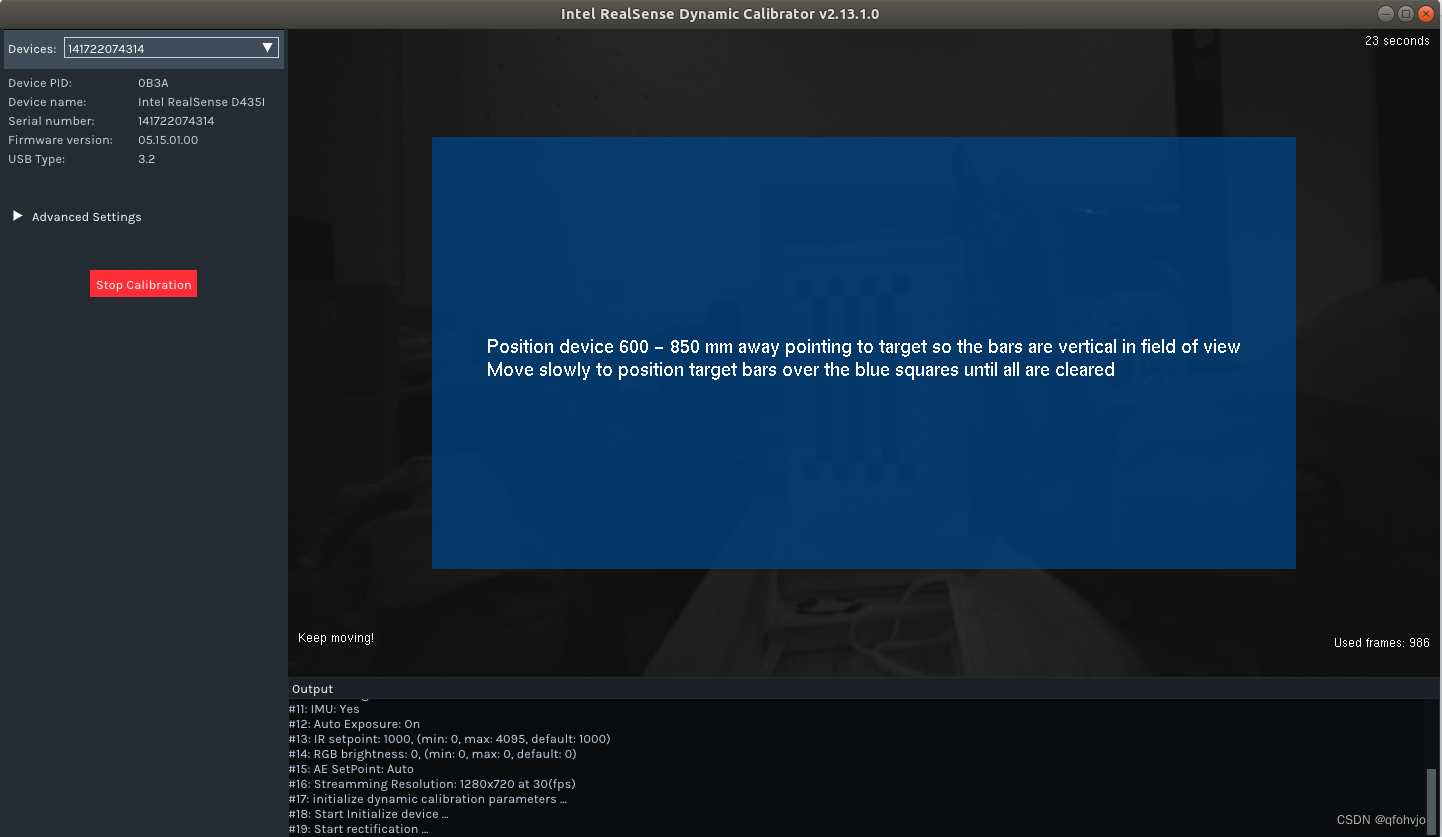
Place the camera about 60 – 85 cm away and point to the target. It should not be too close or too far. Due to various phone sizes, camera device models, and lighting conditions, exact distance cannot be specified. User will need to move the camera in the specified range to find a distance that works best. In most cases, a distance of around 70 cm is sufficient.
将相机放置在大约60–85厘米外,并指向目标。它不应该太近或太远。由于不同的手机尺寸、相机设备型号和照明条件,无法指定确切的距离。用户需要在指定的范围内移动相机,以找到最有效的距离。在大多数情况下,大约70厘米的距离就足够了。
首先打开软件
/usr/bin/Intel.Realsense.DynamicCalibrator点击start
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 亚马逊鲲鹏系统给我带来的真实体验感
- vue-springboot+java大学生二手电子产品交易平台
- 【Java】缓存击穿解决方案
- 室内室外巡更巡检考勤人员定位
- 低代码企业级PMO项目管理系统,360度全景透视企业管理视角
- 数据中心机房建设不同时期选择机柜PDU的注意事项
- oracle19C之lock table
- CSS中的页面布局方式
- FPGA-Xilinx ZYNQ PS端实现SD卡文件数据读取-完整代码
- 机器视觉系统选型-选型示例分享