使用级联毫米波传感器的成像雷达参考设计1(TI文档)
说明
?????? 该参考设计为级联成像雷达射频系统提供了基础。级联雷达设备可以支持远程雷达(LRR)波束形成应用,以及中程(MRR)和短程雷达(SRR) MIMO应用,具有增强的角度分辨率性能。
?????? AWR2243级联雷达射频开发套件已用于估计和跟踪350米以上的位置(在方位平面上),采用多设备波束形成配置。此外,该系统在TDMA-MIMO配置下的方位角分辨率小至1.4度。
????????本设计指南中的数据是使用MMWCAS-RF-EVM Revision C获得的,该版本使用了AWR1243P器件。然而,最新的MMWCASRF-EVM修订D使用第二代AWR2243器件。此AWR2243解决方案应在未来的设计中参考。
特性
?????????用于LRR, MRR和SRR应用的两个或四个芯片FMCW雷达传感器
?????????检测距离超过350米的物体(例如,汽车和卡车),距离分辨率为35cm;在150米距离内可检测到的人类RCS物体
?????????天线视场±70o,角分辨率约为1.4度
?????????提供MATLAB MIMO和波束形成示例代码
?????????基于AWR2243的演示设计
?????????级联成像雷达前端波束形成和MIMO配置充分解释
1 系统说明
????????ADAS对车辆的控制提供了生活质量和安全方面的好处,除了使相对平凡的驾驶行为更安全、更容易。生活质量功能包括车辆自动停车的能力,或者确定是否可以改变车道,并提供自动巡航控制等功能-车辆与前车保持恒定距离,本质上是跟踪前车的速度。自动制动和防撞是防止因驾驶员注意力不集中而发生事故的安全功能。这些功能通过观察汽车前方区域,并在观察到可能撞击汽车的障碍物时向ADAS子系统发出警报。实现这些技术需要各种传感器来检测环境中的障碍物,并随时间跟踪其速度和位置。
1.1 为什么是级联雷达?
?????? 调频连续波(FMCW)雷达可以精确测量障碍物和其他车辆的距离和相对速度;因此,雷达对于自动驾驶汽车应用(如停车辅助和变道辅助)和汽车安全应用(自动刹车和防撞)非常有用。雷达相对于照相机和基于光探测和测距(LIDAR)的系统的一个重要优势是,雷达相对不受环境条件(如雨、灰尘和烟雾的影响)的影响。FMCW雷达可以在完全黑暗中工作,也可以在明亮的日光下工作(雷达不受眩光的影响),因为它们发射和接收电磁波。与超声波相比,雷达通常具有更长的范围和更快的信号传输时间。
?????? 尽管雷达技术有许多优点,但在许多情况下,汽车制造商仍然使用摄像头传感器作为主要传感器技术,用于在系统中做出最终的安全决策。
?????? 雷达传感器作为辅助传感器;也就是说,车辆系统接收到雷达警告,但只有在摄像头传感器验证后才决定采取行动。主要原因是雷达角分辨率的限制。目前部署在大多数车辆上的雷达传感器缺乏区分具有相同距离和相同相对速度的静态物体的能力。
?????? 如今,一个典型的前雷达传感器大约有5度角分辨率,对应于传感器在100米处区分相距8.5米的物体的能力。距离小于8.5米的物体显示为一个物体。例如,一辆车停在右侧车道上,可能看起来像肩路路灯,因此会被安全系统忽略。
?????? 随着德州仪器(TI)的成像雷达解决方案的引入,这种情况即将改变。
TI成像雷达是一种四芯片级联解决方案,其作用类似于单芯片传感器,但在TX波束形成模式下实现20Log10(NTX)信噪比增益和360/(N*pi)角分辨率(N是MIMO配置中的虚拟天线数量)。
????????使用TI成像雷达解决方案,我们可以在所有天线线性放置的情况下区分间隔0.6度的静态物体,并达到350米的目标检测范围(角分辨率取决于天线配置和TX/RX天线的数量)。
?????? 这种性能使TI成像雷达成为车辆中的主要传感器,并通过为静态和移动物体提供高分辨率图像来提高天气和能见度条件下的安全性。
1.2 TI级联雷达设计
?????? TIDEP-01012是一个介绍性应用,演示了远程波束形成配置和较短范围、高角度分辨率MIMO配置。该参考设计可作为设计用于各种远程和成像雷达应用的独立传感器的起点。TI Cascade RF参考设计已经演示了超过350米的汽车目标检测以及1.4度角分辨率。
????????AWR2243器件上的灵活chirp和帧时序引擎(类似于其他AWR系列毫米波传感器)允许系统作为多模式雷达,在每帧基础上交错波束形成和MIMO配置。这使传感器设计人员能够根据场景动态要求,在级联AWR2243设备阵列上实现最佳距离和最佳角度分辨率。
?????? 跨多个级联AWR2243器件的波束形成天线为传感器设计人员提供了更高的输出功率,从而降低了可检测的目标RCS,或者增加了距离检测,或者两者兼而有之。需要检测汽车、摩托车、行人、标牌、桥梁和其他道路物体和障碍物在350米范围内或超过350米范围的应用可以使用这种操作模式。
?????? 在中距离应用(150米范围)中,在多个级联的AWR2243器件上创建MIMO天线阵列,使传感器设计人员能够最大限度地增加有源天线的数量,从而大大提高角分辨率。1度以下的分辨率成为可能:真正的成像雷达能力。
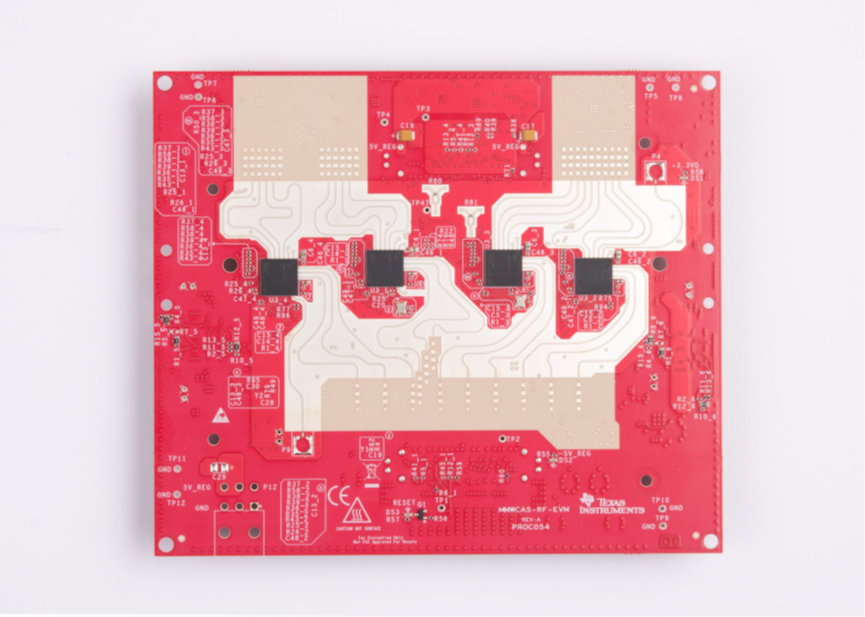
图1 AWR2243四级联雷达射频雷达板
1.3 关键系统指标
????????这个参考设计有两套指标,因为雷达被用作多模式雷达。MIMO是第一个指标。TX波束成形(TXBF)是第二个指标。
表1 关键系统指标
| 参数 | 指标(MIMO) | 指标(TXBF) | 说明 |
| 最大距离 | 150m | 350 | 这表示雷达可以探测到的最大距离,典型RCS约为10平方米 |
| 距离分辨率 | 60cm | 150cm | 距离分辨是雷达系统在相同方位但不同距离上区分两个或多个目标的能力。分辨率是可配置的,因此提供的数字只是一个示例。 |
| 方位角分辨率 | 1.4° | 1.4°(有多波束指向) | 角度分辨是雷达系统区分具有相同距离和速度但角度不同的两个或多个目标的能力。这两个应用的分辨率是相等的。 |
| 俯仰角分辨率 | 18° | n/a | 考虑到TI级联EVM板上的天线设计,仰角分辨率仅适用于MIMO应用。 |
| 最大速度 | 133kmph | 133kmph | 这是对帧数据使用二维FFT获得的本地最大速度。对于TDMA-MIMO,采用速度补偿算法恢复原最大速度。随着时间的推移,通过展示更高级别的算法如何将最大可测量速度扩展到超出此限制,该指标将得到改进。 |
| 速度分辨率 | 0.53kmph | 0.53kmph | 该参数表示雷达传感器区分两个或多个在相同距离但以不同速度移动的物体的能力。 |
2 系统概览
2.1 模块框图
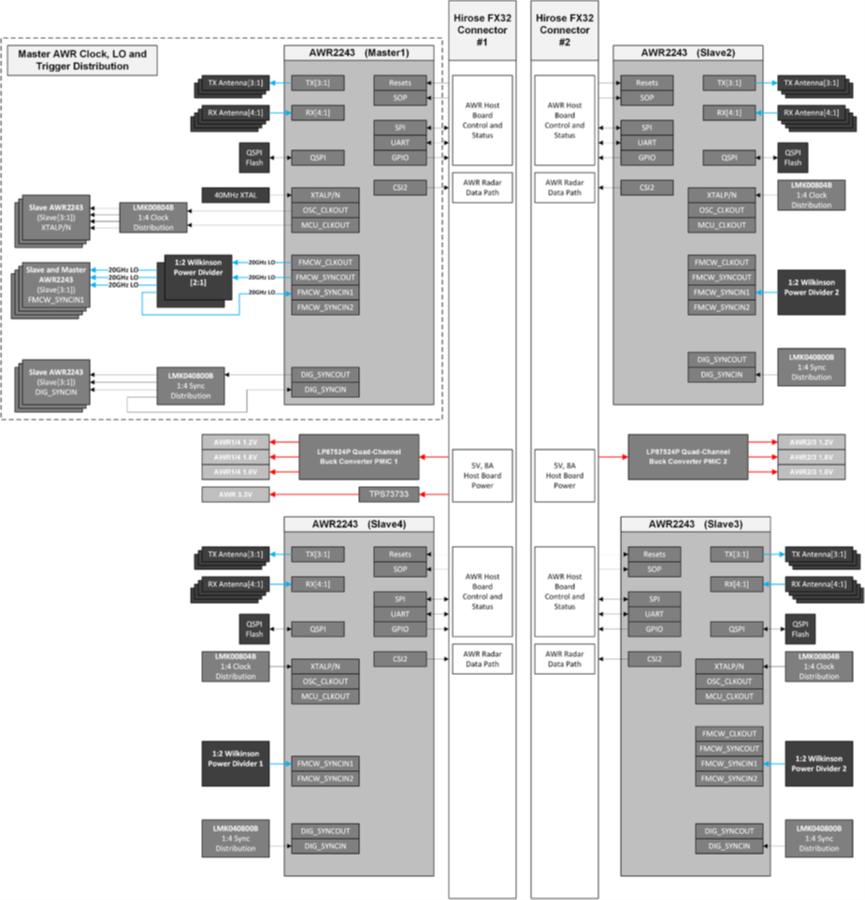
?????? 图2显示了级联射频板的模块框图。
图2 级联雷达射频板系统模块框图
2.2 爆款产品
????????AWR2243是一种集成的单芯片,频率调制连续波(FMCW)传感器,能够在76至81 GHz频段工作。该器件采用TI的低功耗45纳米RFCMOS处理器,以极小的外形实现前所未有的模拟和数字集成水平。该设备具有四个接收器和三个发射器,具有闭环锁相环(PLL),用于精确线性chirp合成。
?????? 每个发射机包括一个可编程的6位移相器(5.625度步进),以实现波束形成应用。每个器件还包括两个20GHz本振(LO)输出和两个20GHz本振(LO)输入路径,用于与相邻器件共享VCO输出。这使得一个具有成本效益的、完全被动的级联雷达架构成为可能。
?????? 该传感器包括一个内置的无线电处理器(BIST),用于射频校准和安全监测。基于复杂基带架构,传感器器件支持15 MHz的中频带宽,在复数和实数采样模式下都具有可重构的输出采样率。两个独立的Arm?Cortex?-R4F处理器运行TI提供的雷达前端、校准和针对ASIL-B的主处理器接口固件。
2.3 设计考虑
2.3.1 AWR2243级联射频板特性
| Cascade Radar RF Board | |
| 4 × AWR2243 76-81GHz Radar SoC | Integrated VCO, LO distribution, PA, LNA, ADC, 3 TX and 4 RX Arm MCU R4 Controller |
| AWR RF Peripherals | |
| 12 × TX, 16 × RX Antennas | 12 total transmitters across all 4 AWR2243 devices16 total receivers across all 4 × AWR2243 devices |
| Azimuth Array | 86 element virtual array – enabling 1.4 degree angular resolution |
| Elevation Array | 4 element virtual array – enabling 18 degree angular resolution |
| Embedded Antenna | Rogers RO3003 4-element, series-fed, patch antenna |
| 20 GHz LOStar Distribution | 2 × passive Wilkinson Power dividers fed by the Master AWR2243 device LO output to Slave AWR2243 devices and Master AWR2243 device |
| AWR Digital Peripherals | |
| Clock Distribution | LMK00804B low-jitter clock distribution |
| Digital Sync Distribution | LMK00804B low-jitter clock distribution |
| CSI2.0 4-lane | 600Mbps/Lane, max 2.4Gbps ADC IF data per device |
| QSPI Flash | 16Mbit QSPI flash for AWR firmware updates |
| Serial Peripherals | SPI, I2C, UART, GPIO |
| System Temperature | TMP112 I2C Temperature Sensors |
| Power | |
| Radar Power Management IC (PMIC) Solution | 2 × LP87524P-Q1 Quad-Channel, Integrated FET, Buck Converters and LC filtering solution |
2.3.2 AWR2243级联射频板架构
?????? AWR2243级联射频板由4个AWR2243 77-GHz雷达器件及其相关的电源、时钟、同步器、本振和射频电路组成。
????????每个AWR2243的RF、RX和TX端口都路由到自己的一组蚀刻贴片天线。RF板上的每个AWR2243都有一个4端口CSI2.0发射机,用于将雷达数据发送到主机处理器CSI2.0接收集。整个AWR2243配置、控制和复位线可在两个主机接口连接器上使用Hirose FX32系列连接器。
?????? AWR2243设备分为主设备和从设备两类。主设备AWR2243 #1采用内置本振分配、时钟分配和帧同步分配的AWR2243架构,为另外三个从设备AWR2243 #2、#3和#4提供40 MHz时钟、20 GHz本振和数字帧同步。这使得系统能够在4个AWR2243设备阵列的发射器和接收器上产生和接收相干的FMCW chirp;使能波束形成和跨设备阵列的MIMO操作。
?????? 20Ghz本振分配遵循AWR2243级联雷达应用说明SWRA574B中描述的启动网络配置。主AWR2243 #1馈送两个威尔金森功率分配器的网络,为主从射频功放和混频器子系统提供同步本振。所有的时钟分配、同步分配和本振分配需求都记录在这个引用的应用(AWR2243 Cascade)说明中。
?????? 级联射频板通过主板连接器接受5V 直流, 8安(最大)电源。主5V系统轨可以通过一对LP87524P四通道单片降压转换器转换成各种AWR2243设备轨。
2.3.3 20GHz本振分配
?????? 所有AWR2243器件的20 GHz本振分配是通过全无源、在线传输和蚀刻分配器网络完成的。通过使用每个AWR2243设备提供的双本振输出和本振输入,包括主设备在内的所有设备都接收到相同的主设备生成的本振输出。这导致所有封装和芯片路由延迟在所有设备中普遍存在。PCB设计者只剩下BGA到BGA延迟匹配的任务。
????????通过同时使用6dBm(典型)本振输出,并最大限度地减少传输线和功率分配器的损耗,无需在本振网络中添加外部放大器。此外,通过输出20 GHz的本振而不是77 GHz的射频进行射频同步,本振 PCB链路预算可以更宽松。
?????? 无源本振分配网络和宽松的链路预算使PCB设计更灵活,整体系统成本更低。
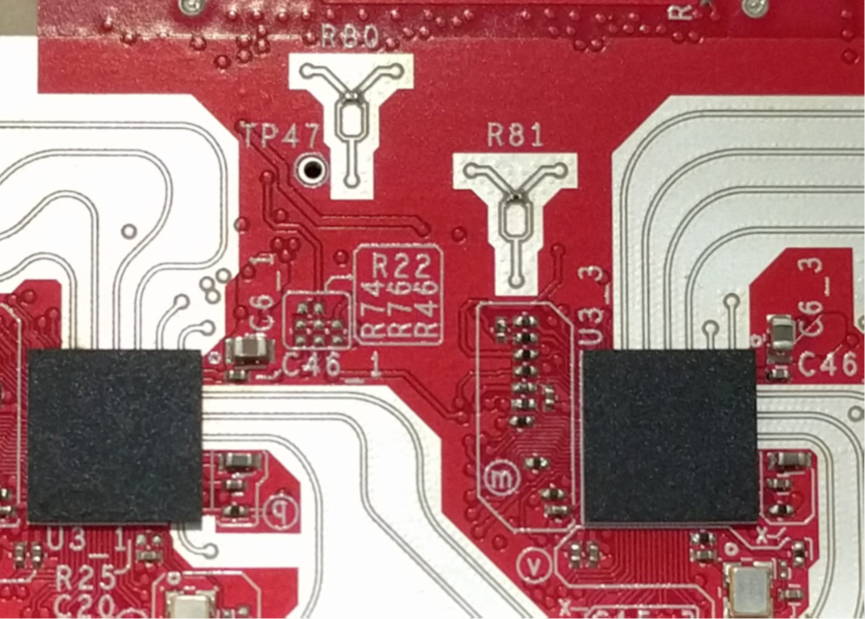
图3显示了延迟匹配本振分配的框图。图4显示了在GCPW传输线中实现的威尔金森功率分配器。AWR2243设备和功率分压器的扇出通过GCPW线路。本振分配长度主要通过内部带状线层进行。
图3 20GHz本振分配模块框图
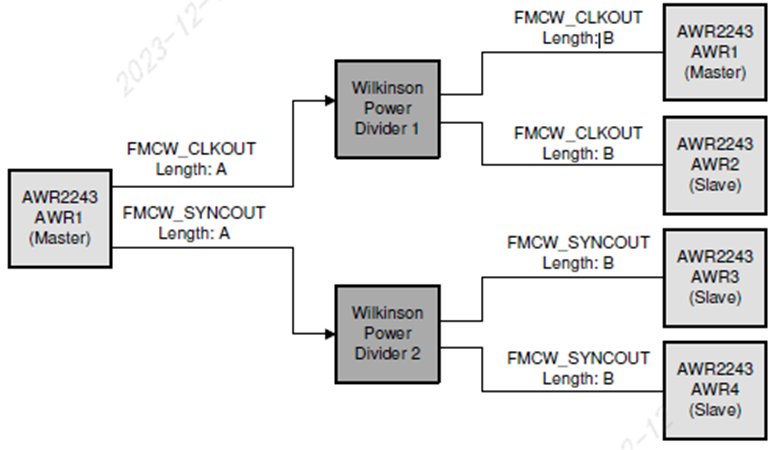
图4 20GHz本振分配板上实现
3 系统设计原理
????????级联射频MIMO和波束成形天线设计、chirp和帧配置是系统变量,必须为特定应用共同设计。这里介绍了天线阵列、MIMO chirp和波束形成chirp设计。
3.1 天线配置
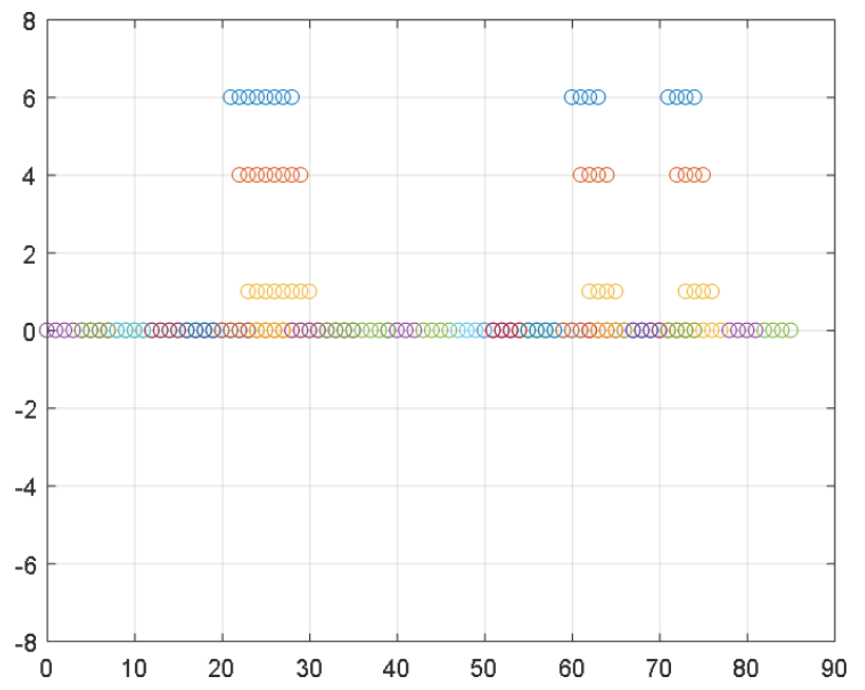
?????? 图5显示了级联射频板上的天线阵列,其中包含一个主设备和三个从设备。这些设备一起创建了12个TX通道和16个RX通道。在12个TX通道中,来自主设备的3个TX1/2/3被放置在垂直方向,用于仰角天线估计。其余9个TXs (TX4至TX12)和所有16个RX通道放置在水平面上进行方位角估计。TXs与RXs之间的相对距离如图6所示。三个仰角天线放置形成最小冗余阵列以提高仰角分辨率。每两个方位角间隔两个波长。RX阵列A和RX阵列C相距16个波长。RX阵列C和RX阵列B相距四个波长。MIMO模式下的虚拟阵列如图7所示,在方位方向上有86根虚拟天线。方位角上重叠的天线不在图中显示。仰角分辨率相当于7根天线的分辨率。
图5 设备和天线阵列组
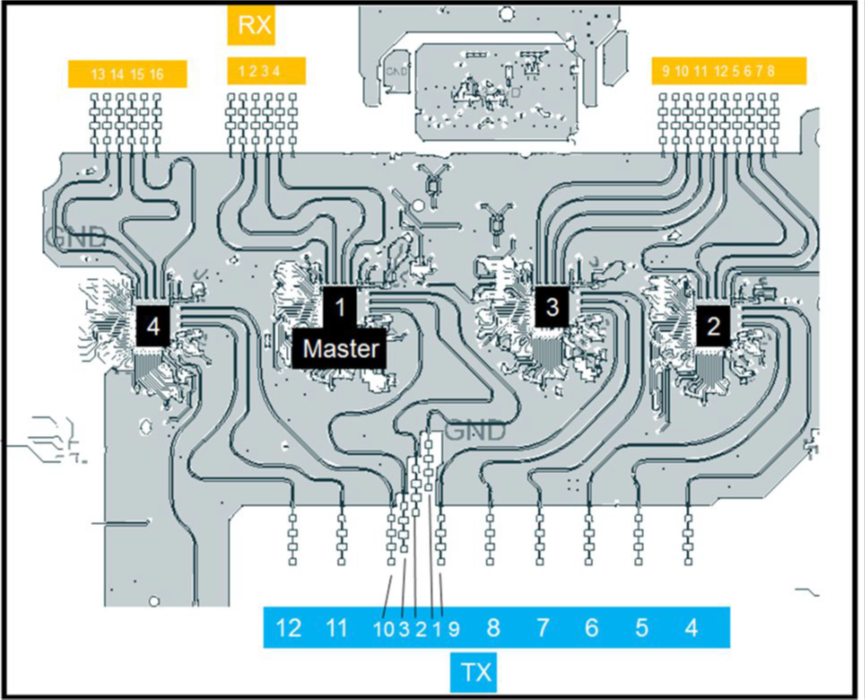 图6 天线阵列位置
图6 天线阵列位置
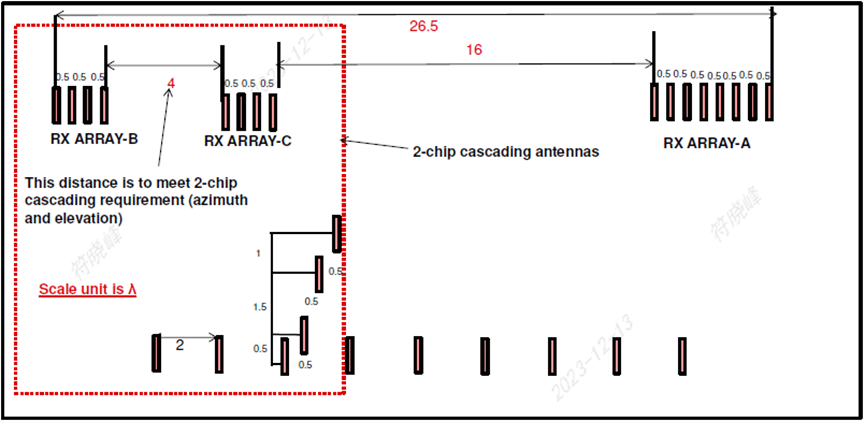 图7 4设备级联虚拟MIMO阵列,有12个发射天线16个接收天线
图7 4设备级联虚拟MIMO阵列,有12个发射天线16个接收天线
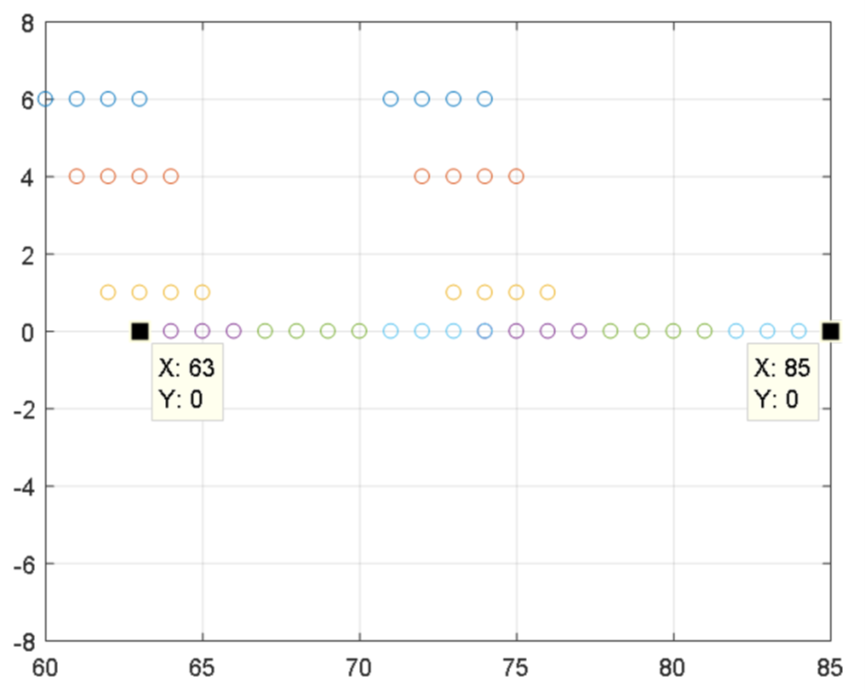
?????? 级联射频板也可用于两片级联模式,图6中突出显示了6个TX和8个RX通道。图8显示了2设备级联模式下的虚拟MIMO阵列,TX ID为[1 23 10 11 12],RX ID为[4 3 2 1 16 15 14 13],23个方位天线,仰角配置和4设备级联相同。
图8 2设备级联虚拟MIMO阵列,有6个发射天线8个接收天线
3.2 chirp配置
????????对于MIMO和TXBF用例,chirp配置是不同的。
3.2.1 MIMO雷达chirp配置
?????? 对于MIMO应用,使用表2的chirp配置。
表2 chirp配置-MIMO
| ??????????? PARAMETER | SRR | MRR |
| Idle time (μs) | 5 | 4 |
| ADC start time (μs) | 6 | 5 |
| Ramp end time (μs) | 40 | 23 |
| Number of ADC samples | 256 | 256 |
| Frequency slope (MHz/μs) | 79 | 15 |
| ADC sampling frequency (MSPS) | 8 | 15 |
| Number of chirps per frame per TX | 128 | 128 |
| Effective chirp time (μs) | 34 | 17 |
| Bandwidth (MHz) | 2528 | 256 |
| Frame length (ms) | 69 | 4.4 |
????????通过这种chirp配置,可以实现表1中指定的MIMO性能。主要目标是实现最大距离约150米,最大速度为+/- 130公里/小时。有关详细信息,请参阅《Programming Chirp Parameters in TI Radar Devices》。如前一节所述,在MIMO模式下,方位角使用6个天线,仰角使用3个天线。3个重叠的方位天线不能用于MIMO。因此,MIMO帧中的chirp总数是9 x“每帧每Tx的chirp数”。在时分多址MIMO中,重叠天线用于Vmax扩展。
3.2.2 TXBF雷达chirp配置
?????? 对于发射天线波束形成应用,使用表3的chirp配置。
表3 chirp配置-TXBF
| ??????????? PARAMETER | SPECIFICATIONS |
| Idle time (μs) | 4 |
| ADC start time (μs) | 5 |
| Ramp end time (μs) | 23 |
| Number of ADC samples | 256 |
| Frequency slope (MHz/μs) | 2.5 |
| ADC sampling frequency (MSPS) | 15 |
| Number of chirps per frame per TX | 128 |
| Effective chirp time (μs) | 17 |
| Bandwidth (MHz) | 43 |
| Frame length (ms) | 3.5 |
????????通过这种chirp配置,可以实现表1所示的TXBF性能。主要目标是实现350米的最大距离和+/-130公里/小时的最大速度。有关详细信息,请参阅《Programming Chirp Parameters in TI Radar Devices》。
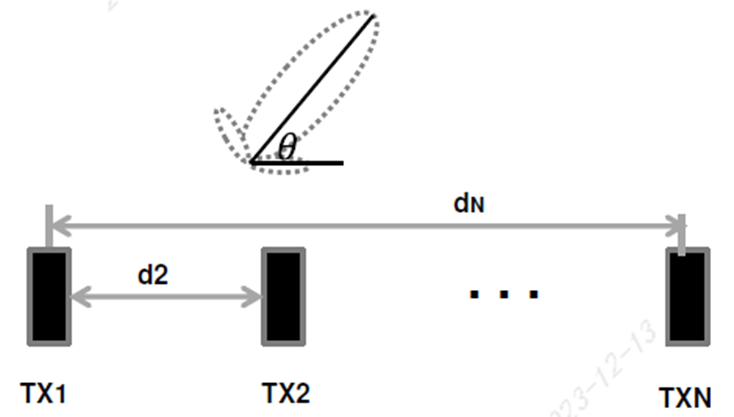
?????? 作为阵列因子和目标角度的函数来计算每个TX通道的相位值。假设有N个TX通道,以TX1为参考,则主板开发时设计天线阵列时,其余各天线与TX1之间的距离为已知距离。如图9所示,对于TI级联EVM,任意两个相邻TX通道之间的距离是波长的两倍。
图9 用于波束形成的TX阵列
????????根据图9的表示法,每个TX通道的相位值计算为:
?????????![]() ?(1)
?(1)
?????? 通过允许的相位步长5.625度进一步量化理想相位值,以计算要编程到寄存器的整数值(下一节还将添加TX校准相位值)。
????????![]() ??(2)
??(2)
?????? 以TI级联EVM为例,可采用9个方位TX天线进行波束引导,[d2 = 2λ,d3 = 4λ,…,d9 = 16λ]。如果期望的转向角为30度,则相位矢量如式3中的度数所示。
????????![]() ??(3)
??(3)
????????TX波束形成应用支持基于chirp的波束转向和基于帧的波束转向。高级帧配置可以用于这两种情况。
3.2.2.1 基于chirp的波束转向
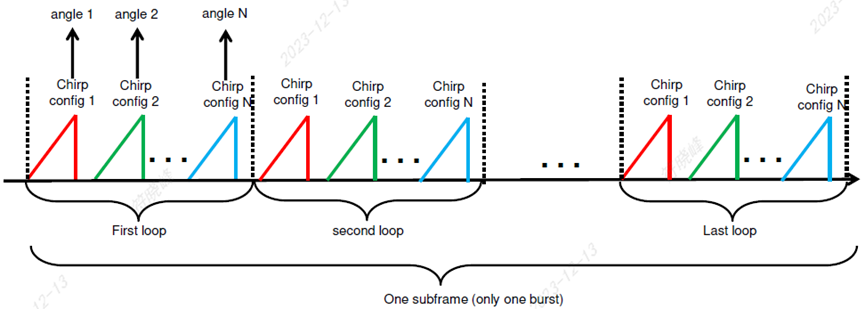
????????在用于TX波束形成的子帧中,该子帧中使用的chirp数量等于不同期望的转向角度的数量。每个chirp配置都与TX阵列的相位值相关联,相位值是根据相应的期望转向角计算出来的。在一个触发中,所有的chirp配置都是循环的,直到触发结束。图10展示了基于chirp的波束转向机制。
图10 基于chirp的波束转向
3.2.2.2 基于帧的波束转向
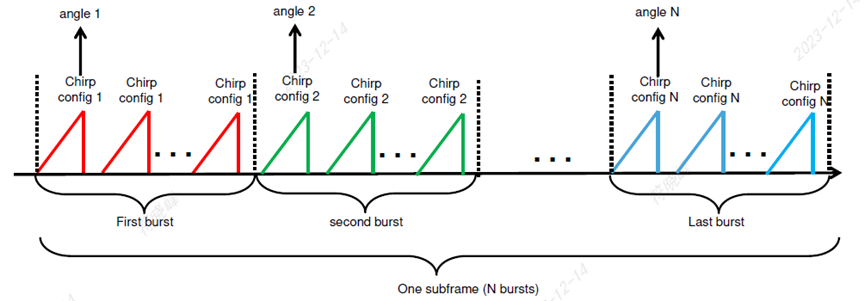
?????? 在用于TX波束形成的子帧中,该子帧内的触发数等于不同期望角度的数量(与chirp配置的数量相同)。每个触发与每个chirp配置相关联,因此触发相当于一个帧,其中每个chirp具有相同的移相器值。图11展示了基于帧的波束转向机制。
图11 基于帧的波束转向
3.3 天线校准
?????? 天线校准的目的是估计一个主设备和三个从设备之间的频率、相位和幅度失配。失配可以由各种原因引起,如路径长度失配,芯片之间的变化,天线耦合等。在电路板布局阶段,通常通过路由路径长度匹配来最小化频率失配。TI开发套件提出的校准方法是一种一次性的内径校准方法。建议执行(雷达)板上特定的校准,以达到最佳的角度性能。
3.3.1 如何生成相位/增益校准矩阵
????????为了生成校准矩阵,建议在5 m及以上的距离放置一个角反射器,典型的角反射器RCS为1 ~2 m2,如图12所示。角反射器应在方位角和仰角方向上与(雷达)板的阵列中心对齐。带激光笔的水平传感器可以用于对齐。
图12 天线校准设置
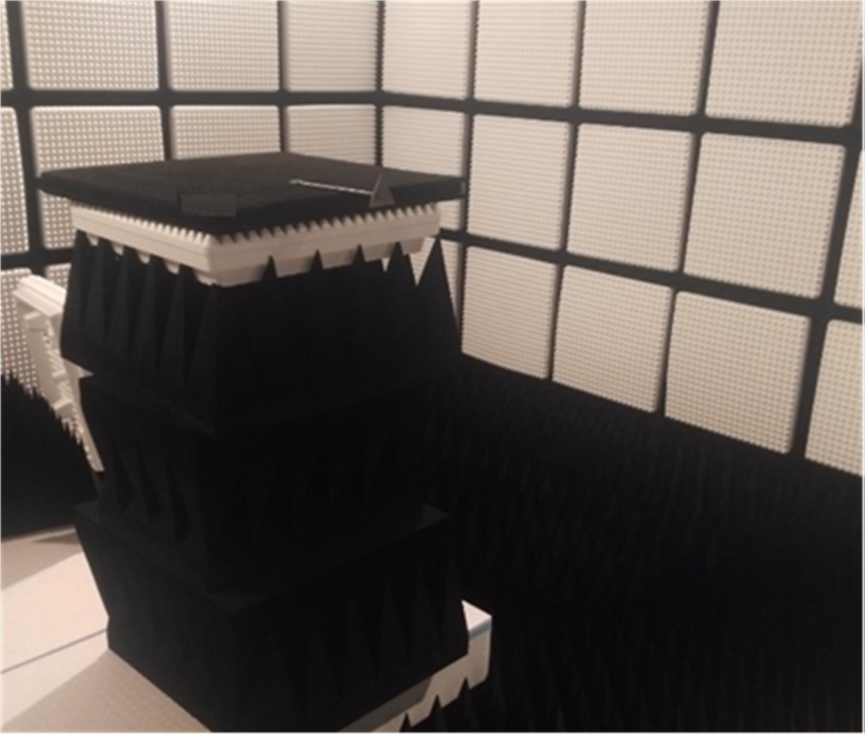
????????当角反射器放置在中心位置时,需要使用mmWave Studio发布版中提供的示例脚本收集几帧原始ADC数据。在数据采集过程中,在TDM MIMO模式下打开12个TX,同时打开所有16个RX通道。
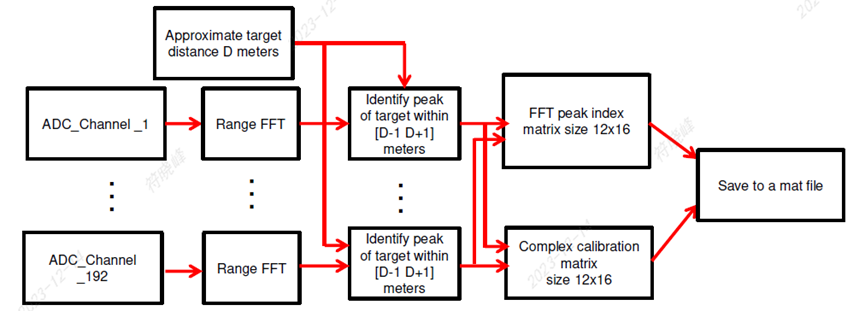
????????校准矩阵的生成遵循图13所示的顺序。在原始二进制数据被读取和格式化之后,来自192个虚拟通道的数据被分离。对每个通道进行距离FFT,将角反射器对应的峰值识别为[D - 1, D + 1]米内的局部最大值,其中D为用户提供的近似目标距离。所有192个通道的FFT峰值指数形成12 x 16的矩阵大小,将用于频率校准步骤。所有192个通道的峰值处的复数值形成一个尺寸为12 x 16的复数校准矩阵,将用于相位和幅度校准。这两个矩阵保存到matlab .mat文件中,以便在将校准结果应用于ADC数据时加载。
图13 生成相位和增益校准矩阵流程
3.3.2 应用校准的MIMO操作
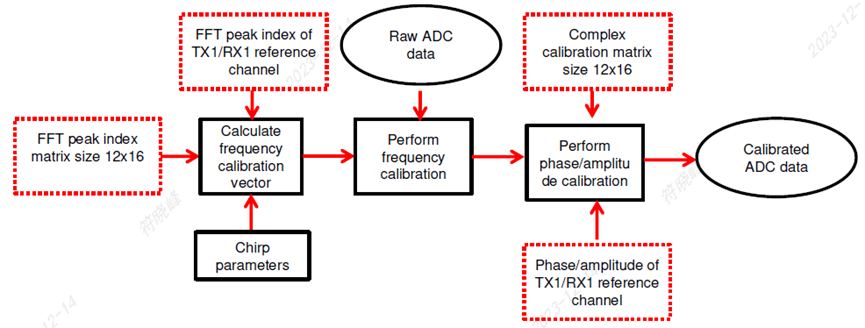
????????将保存的校准信息应用于在MIMO模式下收集的原始ADC数据,分两个步骤,如图14所示。
3.3.2.1 频率校准
????????以TX1/RX1通道的FFT索引作为参考,与其他191个通道进行比较。使用公式4,利用FFT索引差和chirp参数计算频率校准向量。
? ? ? ?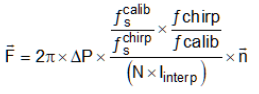 ??(4)
??(4)
????????这里,
?????? ?ΔP是一个虚拟通道的FFT峰值索引差
?????? ?fchirp是FMCW chirp频率斜率
?????????fcalib是用于校准的FMCW chirp频率斜率,可以和fchirp不同
?????????N是每个chirp的ADC采样数量
?????????N=[0 N-1]是ADC采样索引
?????????Iinterp是用于频率校准的插值因子,下一节将进一步解释
?????????F是计算的频率校准向量
?????????exp(-j×F)是与原始ADC数据相乘进行频率校准
?????????fscalib是用于校准的FMCW chirp采样率,它可以不同于fschirp采样率
?????? 对于每个虚拟通道,计算F并应用于对应的ADC数据。
3.3.2.2 相位和幅度校准
????????频率校准后,根据参考通道的复数值计算相位和幅度校准值
?????????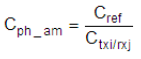 ?(5)
?(5)
?????? 这里,
?????? Cref是参考通道的复数值
?????? Ctxi/rxj是其他通道的复数值
?????? Cph_am是计算的相位和幅度校准值
?????? Cph_am对于参考通道是1,对于每个其他通道都不同,Cph_am乘以频率校准的输出,结果是最终校准的ADC数据。
图14 给ADC数据应用校准矩阵流程
3.3.3 应用校准的TXBF操作
????????保存的校准信息应用于TX波束形成操作,如图15所示。将“如何生成校准矩阵”一节中得到的12 × 16复数值矩阵的相位值在16个RX通道上平均,得到12个TX通道的相位校准向量。根据实际TX波束形成模式中使用的TX通道索引,使用该12 × 1矢量内对应的相位值进行相位补偿。在启动波束转向过程之前,利用补偿相位值和根据期望转向角计算的相位值对相移寄存器值进行编程。
图15 在TXBF(模式)校准

????????同样,对12个TX通道的相位进行平均,以获得16个RX通道的相位校准向量。假设16个RX通道之间没有频率失配,这是仅相位RX校准。通过以下步骤收集校准数据,可以捕获16个RX通道的频率失配。
????????1. 在一个已知的距离放置一个角反射器,例如,大约6米
????????2. 配置所有的TX通道转向零度
????????3. 检查所有16个RX通道的FFT峰值索引;FFT峰值索引表示频率失配,类似于3.3.2节中描述的频率失配。
????????在RX数据后处理阶段应用相位校准值。更多细节将在TX波束形成的信号处理部分讨论。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【编译原理】词法分析器
- 网站监测工具的极与极,Site24x7 与百川云
- 蓝牙简学(二)
- 微软Power Platform使用Power Automate Desktop flow桌面流爬取京东商品信息
- 华为OD机试 - 找数字(Java & JS & Python & C)
- git 常用命令 修改 远程仓库 默认分支
- 功率放大器模块的作用是什么
- 3.召回率-机器学习模型性能的常用的评估指标
- 三元表达式竟然可以这样玩(多条件判断无限嵌套)
- 【MySQL】之解密int(1)、int(4)、int(11)、varchar(5)和varchar(255)的区别,一篇告别冗杂的数据库设计秘籍!(1)