伺服电机:伺服电机基础知识
一、什么是伺服
伺服,英文Servo,来源于拉丁语Servus,意思是奴隶,奴隶的特点就是完全按照主任的指令去做事。伺服电机,也就是严格按照控制指令来运行的电机。利用伺服电机搭建起来的系统或者机构就叫伺服系统或者伺服机构,可以用来进行位置控制、速度控制、转矩控制。
伺服机构的主要特点是有反馈,为了实现高精度的动作,避免与指令发生偏差需要不断进行反馈,因此伺服的控制逻辑就是为了缩小指令信号与反馈信号的误差。
伺服机构主要包括三个部分:
1、指令部:发出动作的指令信号,一般有PLC,运动控制卡等;
2、控制部:让电机按照指令运行,一般是伺服驱动器;
3、驱动部:一般就是电机及其传动结构;
二、伺服系统的作用
1、位置控制:可以准确的运动到指定的位置;
2、速度控制:可以让被控物体按照设定的速度运动,主要用于需要频繁调整运行速度的场景;
3、转矩控制:即使负载变化,也可以以恒定的转矩运行,主要用于张力或者压力控制;
三、伺服电机的种类
常见的伺服电机有同步型AC伺服电机、感应型AC伺服电机、DC伺服电机这3种。用的比较多的还是同步型AC伺服电机。
同步型AC伺服电机的特点
优点:
????????环境适应性强,无需维护;
????????可输出大转矩;
????????停电时,可进行发电制动;
????????体型小巧、功率范围大;
缺点:
????????必须配套伺服驱动器,且伺服驱动器比DC电机的要复杂;
????????永磁铁的磁力会随着时间的推移而变弱;
感应型伺服电机的特点
优点:
????????环境适应性强,无需维护;
????????可输出高速,大转矩;
????????容量越大,效率越高;
缺点:
????????停电不能发电制动;
????????性能随温度波动;
DC伺服电机的特点
优点:
????????伺服放大器结构简单;
????????停电时可发电制动;
????????小容量机型价格低;
缺点:
????????需要对整流部进行定期维护检查;
????????会产生电锯粉末,不能用于有洁净度要求的场所;
????????因为有电刷,不能用于高度大转矩的场合;
????????永磁铁的磁力会随时间的推移而减弱;
四、编码器的种类
编码器通常分为增量式编码器和绝对式编码器。
增量式编码器:在伺服驱动器断电之后,伺服电机的位置就丢失了,重新上电,它的位置就变成0,需要重新寻找原点。
绝对式编码器:在伺服驱动器断电之后,可以记住伺服电机当前的位置,不需要重新找原点。
编码器是电机的核心反馈部件,非常重要,关于编码器,在后面章节详细展开。
五、伺服电机的原理和构成
伺服系统的控制过程就是一个缩小误差的过程,要不断缩小误差就需要不断有反馈,通过反馈来监测被控对象是否按照指令在运行。
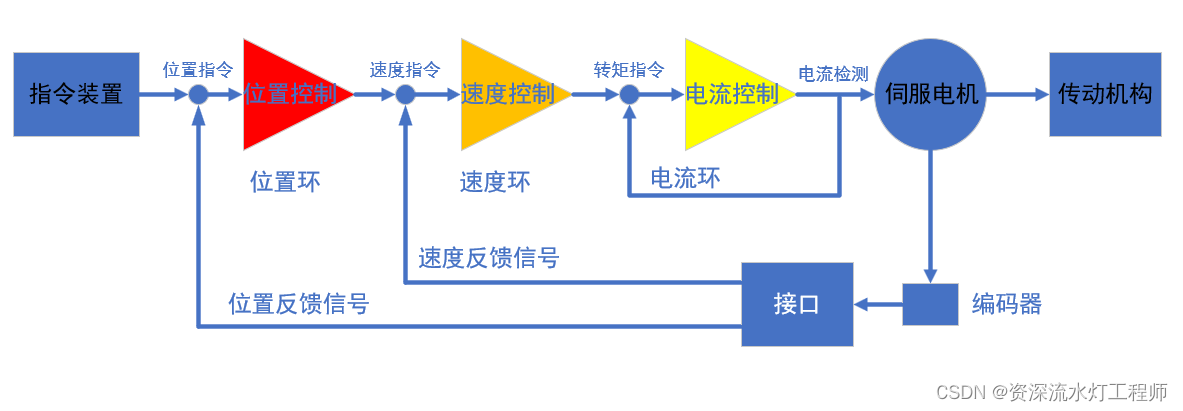
在AC伺服系统中,对编码器所发出的脉冲信号或伺服电机的电流进行检测,将检测结果反馈给伺服驱动器,伺服驱动器根据检测结果和相应的控制指令,对伺服电机进行相应的控制,根据指令的不同,伺服系统可分为三种控制模式:位置控制模式、速度控制模式、转矩控制模式。
位置控制模式:起主要作用的是位置环,根据编码器脉冲返回的位置信号进行位置控制,脉冲个数就可以表征位置;
速度控制模式:起主要作用的是速度环,也是根据编码器返回的脉冲,但是脉冲对时间求导就是速度了;
转矩控制模式:转矩与电流是直接相关,控制转矩就是控制电流,需要检测伺服驱动器的输出电流,根据电流反馈信号进行转矩控制。
电流环的响应速度最快,其次是速度环,位置环响应速度最慢;
从图中可以看出,
位置控制模式使用的环有:位置环、速度环、电流环;
速度控制模式使用的环有:速度环、电流环;
转矩控制模式使用的环有:电流环;
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 找出将要运行的命令的版本
- 重生奇迹mu中玩家之间的交易操作
- Linux(23):Linux 核心编译与管理
- 【heic转jpg】heic图片怎么转换成jpg?
- 每日一练:LeeCode-316. 去除重复字母【字符串操作+单调栈+布尔型变量】
- 整理好的题目答案1
- Android 原始方法实现Tablayout样式
- 从0到1打造一款WebStyle串口调试工具【上篇】
- Android消息推送 SSE(Server-Sent Events)方案实践
- Ubuntu系统中指定端口防火墙状态查询与操作