[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05
发布时间:2024年01月18日
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05
1. Recursive Algirithm 递归算法



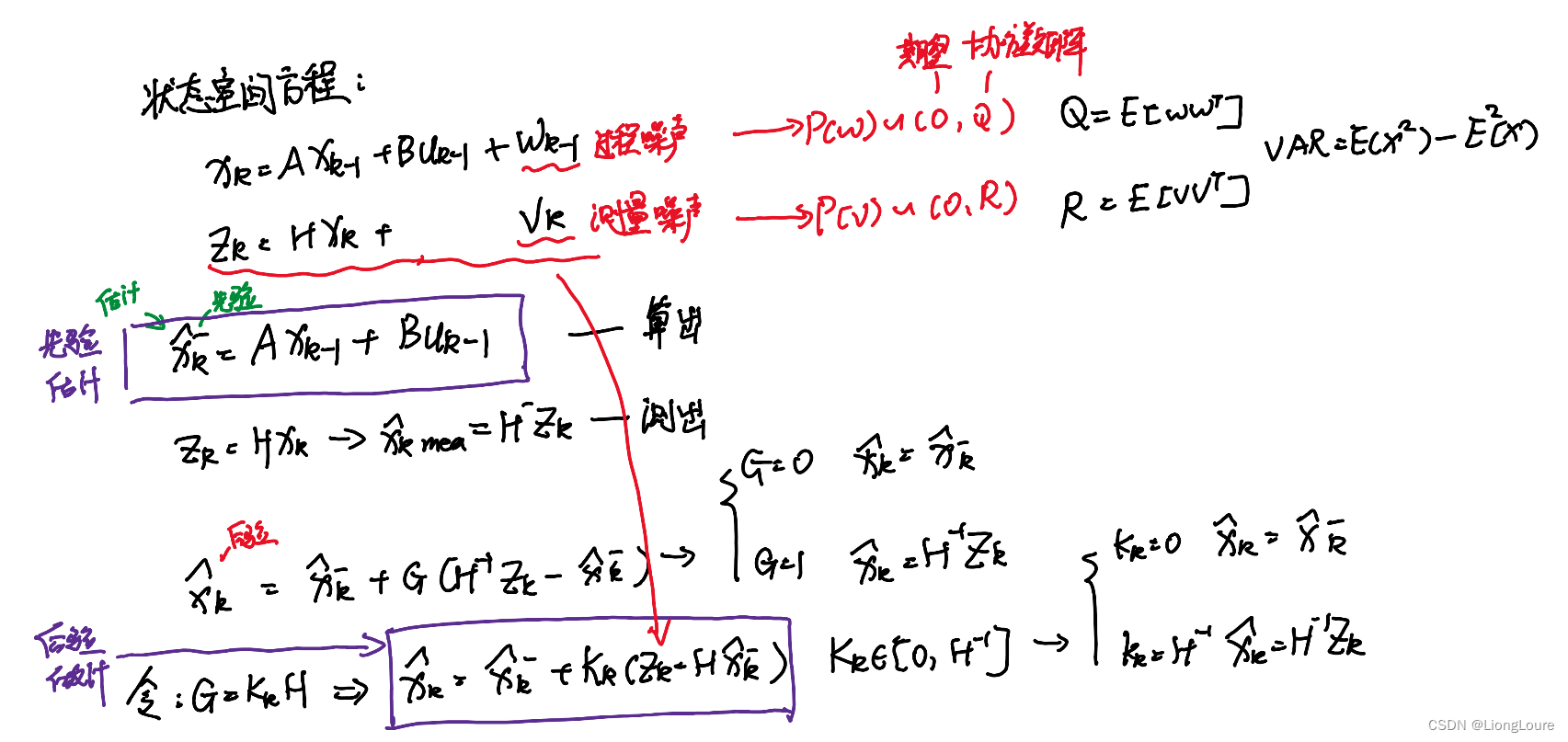
2. Data Fusion 数据融合Covarince Matrix协方差矩阵State Space状态空间方程 Observation观测器




3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
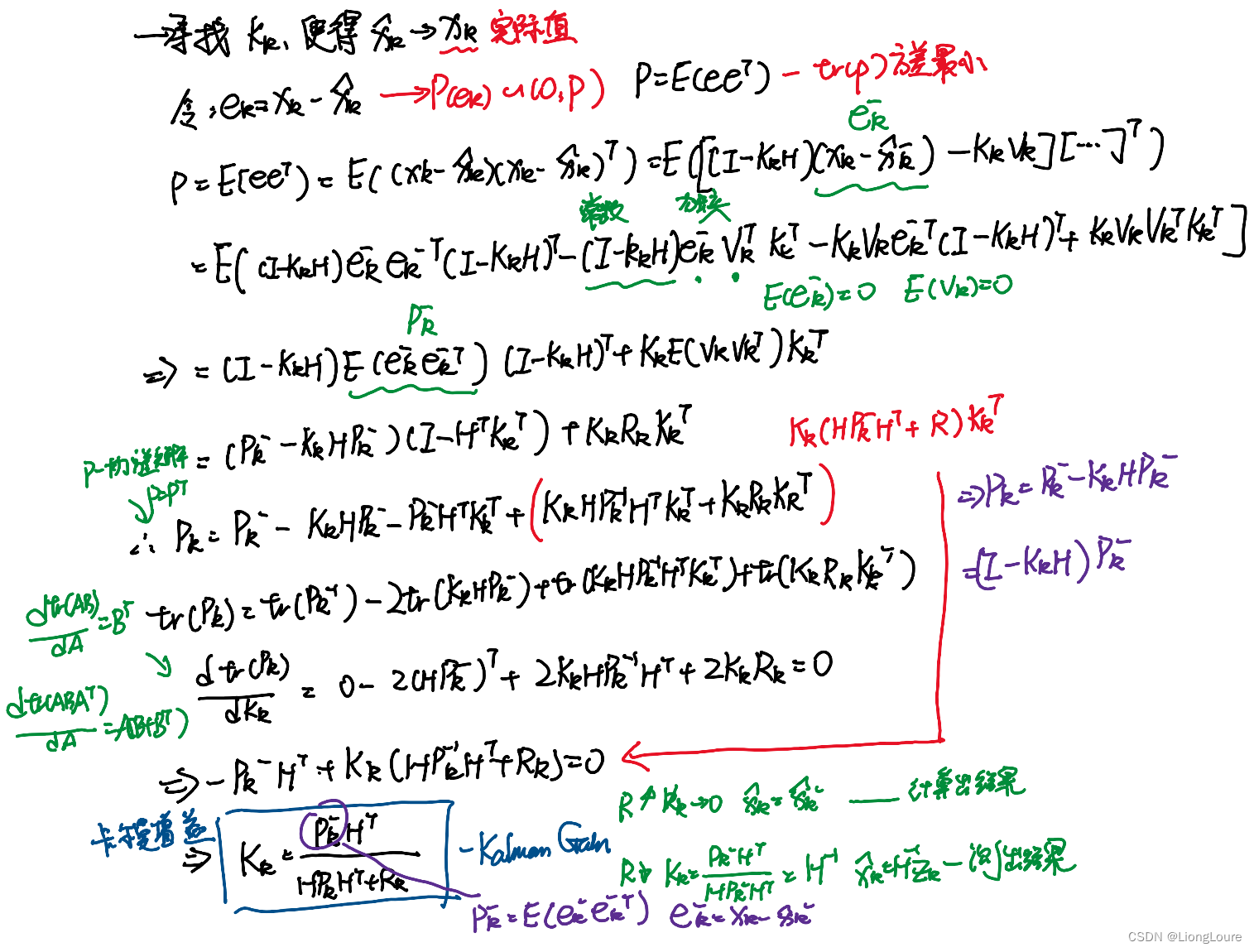
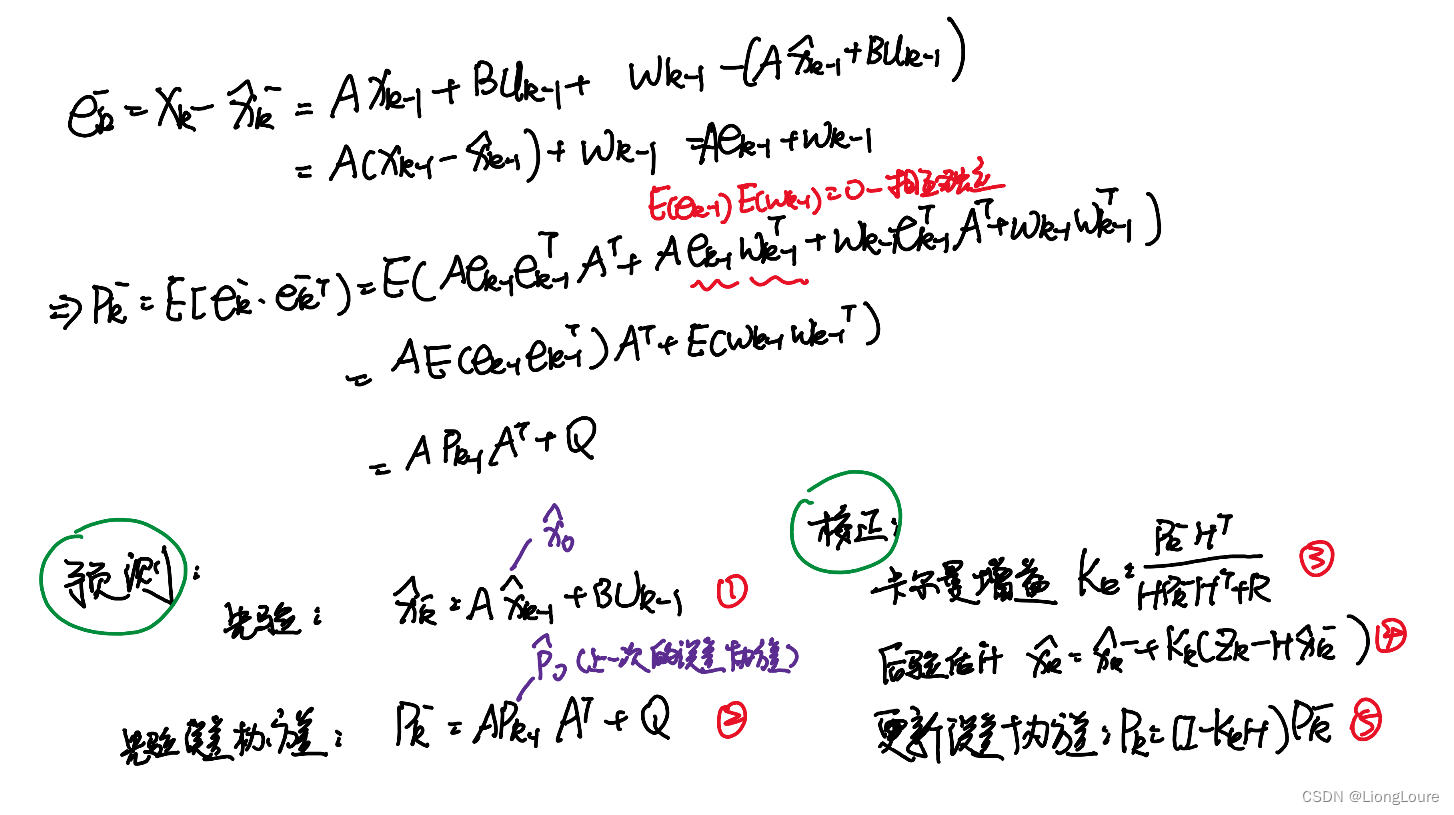
4. Priori/Posterrori error Covariance Martix 误差协方差矩阵
5. An Example 2D例子


6. Extended Kalman Filter扩展卡尔曼滤波器(EKF)



文章来源:https://blog.csdn.net/LiongLoure/article/details/135671788
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【无标题】
- 开年直播|AutoSec线上课第41期:探索软件定义汽车的安全攻击面
- 训练营第三十六天 | 435. 无重叠区间 ● 763.划分字母区间 ● 56. 合并区间
- 酷开科技将AR技术多方应用 打造全能酷开系统
- Stable diffusion 简介
- JavaScript 对象基本介绍
- Redis主从复制哨兵及集群
- RFC6749-OAuth2.0
- 智能物联网汽车3d虚拟漫游展示增强消费者对品牌的认同感和归属感
- QT操作数据库