用BEVformer来卷自动驾驶-2
发布时间:2023年12月24日
回顾上一期:用BEVformer来卷自动驾驶-1 (qq.com)
上一期我们讲到了从3D到4D(加了时间概念)以后使得BEV能变得更厉害,具体这种厉害其实是可以解决纯视觉解决方案里面最难解决的问题,就是基于恶劣天气,或者拍的不清楚的时候,或者突然有遮挡的时候,融入时间的概念,可以很大一定程度上提升解决方案的准确度
总结一下上一期我们介绍的
-
2D:一个摄像头2维平面特征
-
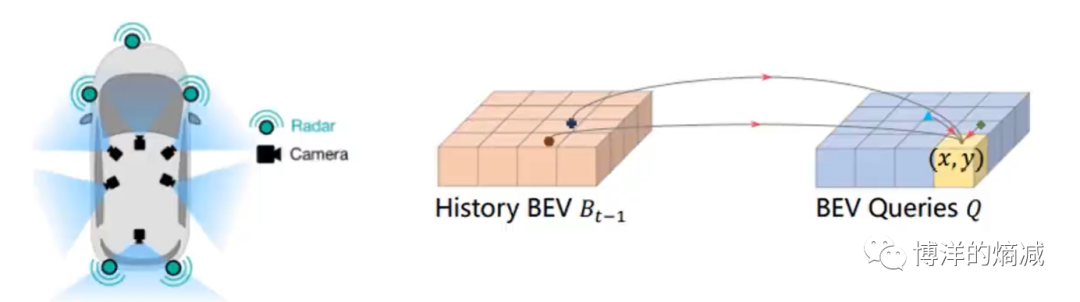
3D:多摄像头特征融合的BEV高维空间
-
4D: 加了时间序列的BEV更高维空间
我们继续
文章来源:https://blog.csdn.net/kingsoftcloud/article/details/135186767
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- java 和go的区别
- 记一次若依ruoyi-ui(Vue2) 关闭tab页并打开新页面
- 如何通过UMC进行产品升级
- RocketMQ源码阅读-Producer发消息
- java练习题之继承(创建对象时属性先赋值输出再执行构造方法)
- Linux 操作系统(查看文件内容)
- 【HDFS】想不到NameNode的异步EditLog竟然这么多细节
- AlDente Pro for Mac - 优化Mac电池寿命的必备工具
- 基于xgboost-LGBM-SVM的病人哮喘病识别检测 数据+代码
- 1.1 Python的起源与发展