惯性导航ROS实现
发布时间:2023年12月28日
惯性测量单元概述
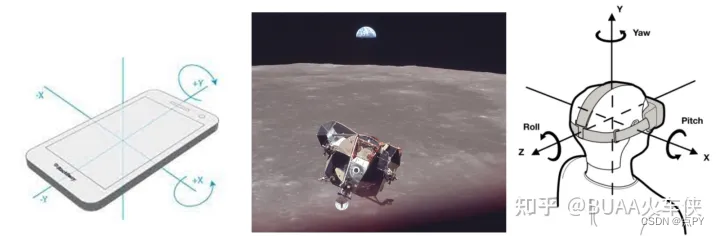
惯性测量单元(Inertial measurement unit,IMU),是测量物体三轴姿态角以及加速度的装置。IMU通常包含陀螺仪 (Gyroscope)、加速度计 (Accelermeters),有的还包含磁力计(Magnetometers)。陀螺仪用来测量三轴的角度/角速度,加速度计用来测量三轴的加速度,磁力计提供磁场朝向信息。
IMU在手机、VR,航空航天领域都有着广泛应用。比如手机的记步功能就是利用IMU的算法达成;VR中IMU可实现随头部姿态变化而切换场景;Apollo登月中依赖IMU实现位置追踪和朝向确认。在自动驾驶领域,IMU同样是重要的导航和定位组件。
IMU的原理
- 首先知道自己的 初始位置,即三维世界坐标系下的位置 ( X
文章来源:https://blog.csdn.net/weixin_42990464/article/details/135255319
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 三、VTK 最简单的示例代码-创建圆柱体
- 生态增长 TVL 飙升,Metis 或是 Layer2 最具潜力黑马
- 有些网页阅读不能复制
- SpringBoot集成Vue3实现的系统(三)
- k8s的网络
- [每周一更]-(第79期):Apache代理的配置
- weixin001-ssm基于小程序的购物系统设计与实现
- SpringCloud跨服务调用失败Seata无法回滚解决办法
- FolkMQ 国产消息中间件,v1.0.21 发布
- 基于Java SSM框架实现多人试卷批改考试命题系统项目【项目源码+论文说明】计算机毕业设计