8. 《自动驾驶与机器人中的SLAM技术》基于保存的自定义NDT地图文件进行自动驾驶车辆的激光定位
发布时间:2024年01月12日
目录
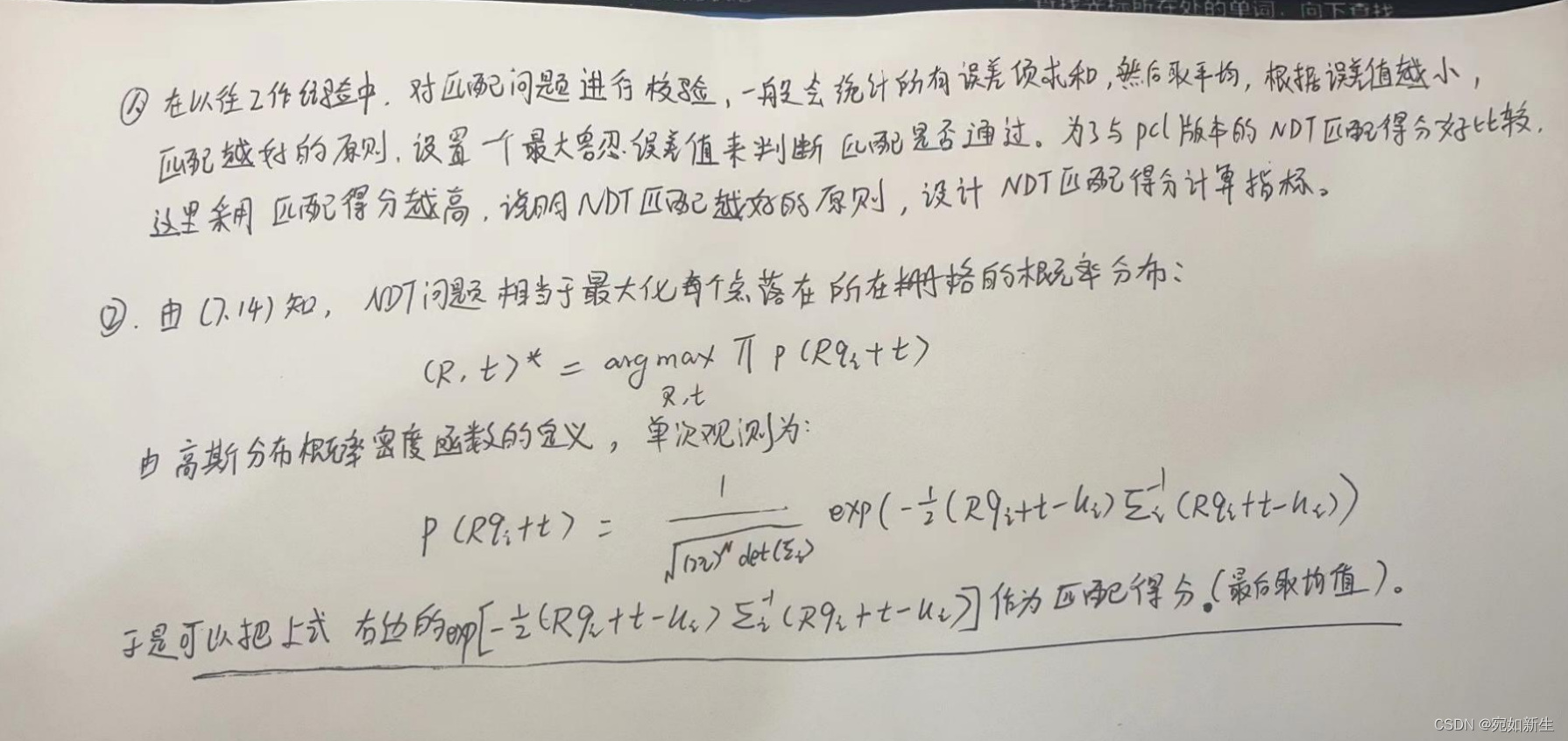
1.?为?NDT 设计一个匹配度评估指标,利用该指标可以判断 NDT 匹配的好坏。
2.?利用第 1 题的指标,修改程序,实现 mapping 部分的回环检测。
3.?将建图结果导出为 NDT map,即将 NDT 体素内的均值和协方差都存储成文件。
4. 实现基于 NDT map 的激光定位。根据车辆实时位姿,加载所需的 NDT 体素并完成定位。
5. 给出上述结果相比于 PCL NDT 的性能、存储空间等关键指标
1.?为?NDT 设计一个匹配度评估指标,利用该指标可以判断 NDT 匹配的好坏。
2.?利用第 1 题的指标,修改程序,实现 mapping 部分的回环检测。




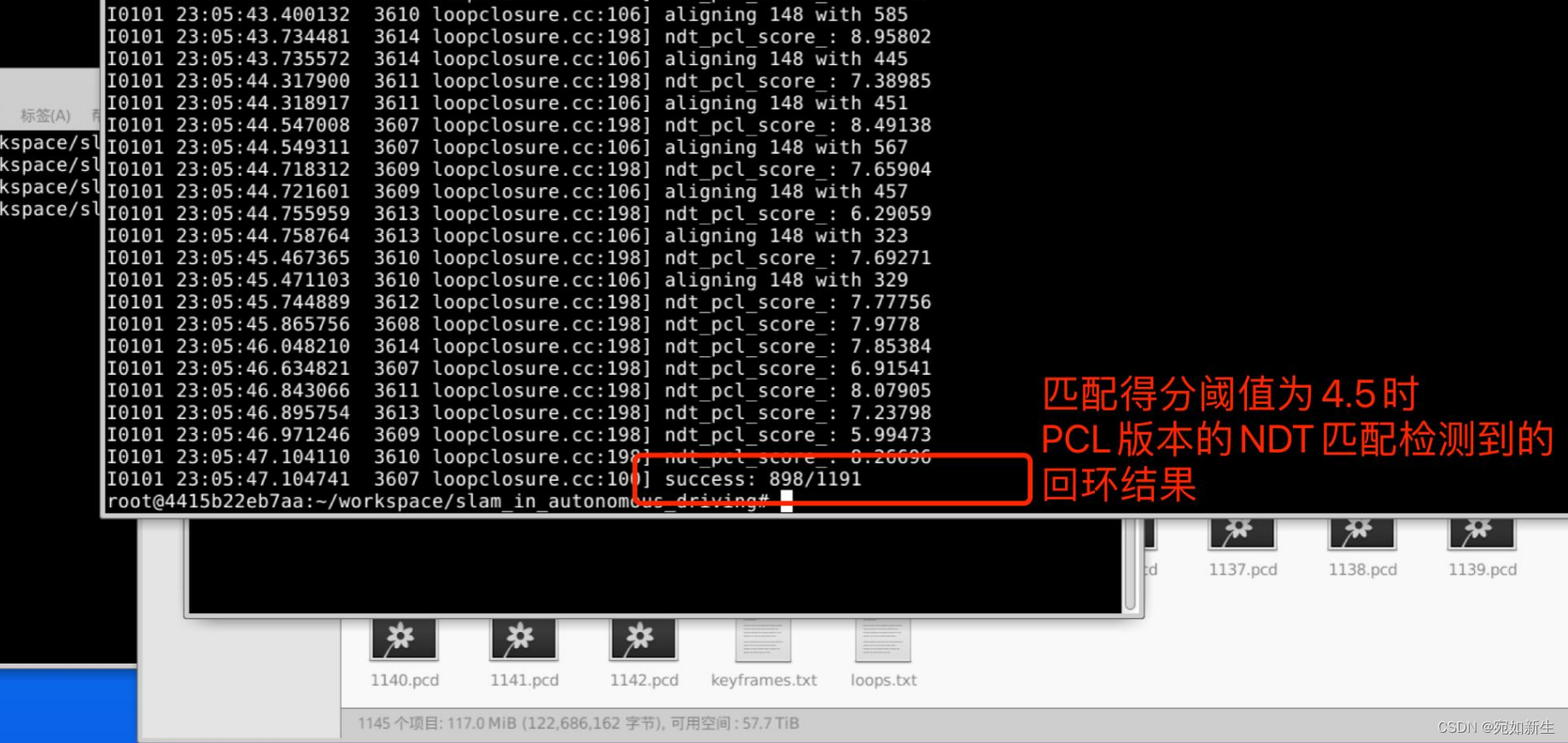
下图是
PCL
版本
NDT
匹配,在阈值设置(
ndt_score_th
)为
4.5
时的匹配结果(
其中加载
的关键帧数目我删掉了一些,因为实在是耗时有点久。。。)
根据上面
PCL
版本的
NDT
检测结果来确定适配自定义指标的阈值(
ndt_score_th
)。
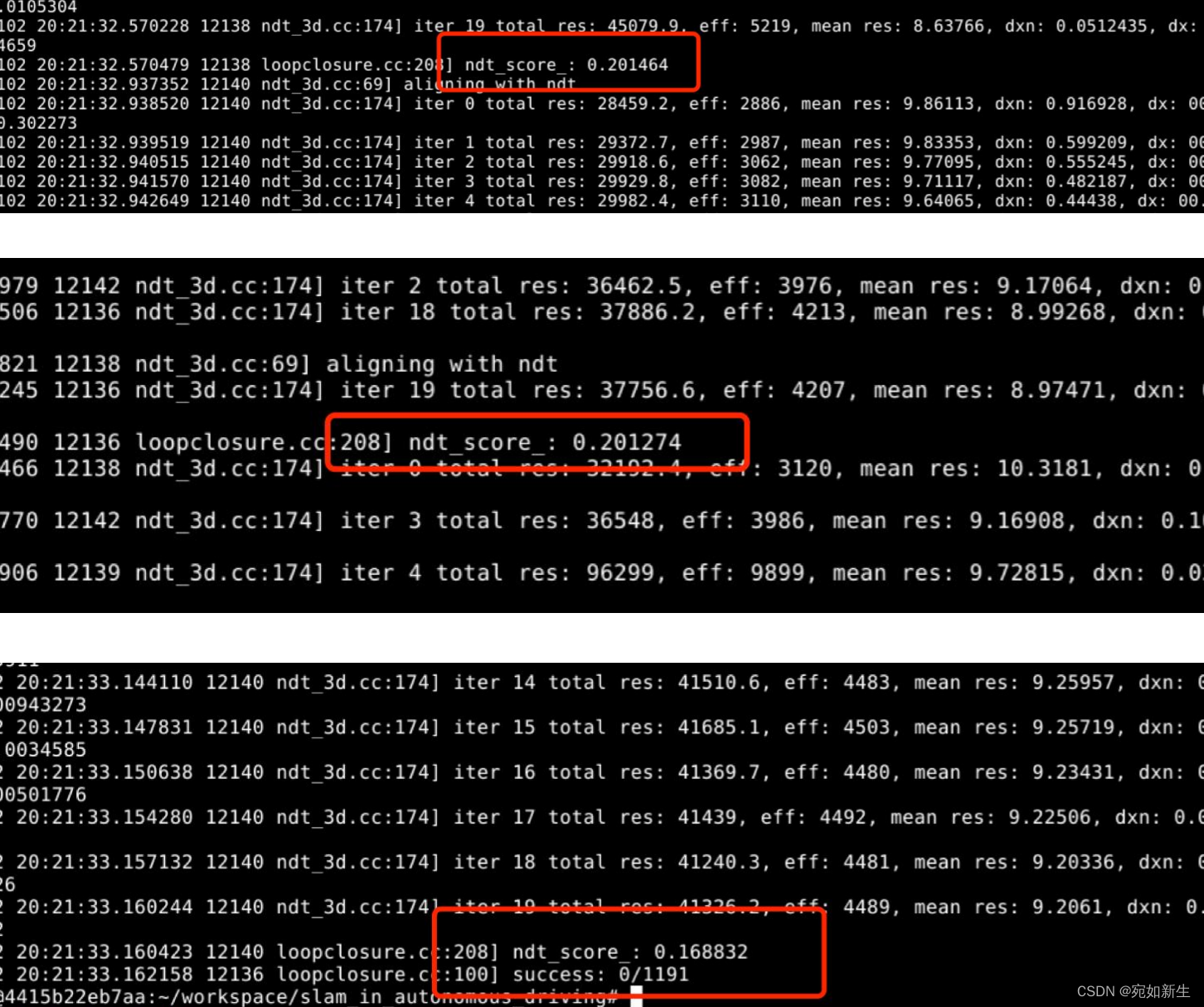
使用原来的阈值明显不对,观察,得分在
0.2
附近,于是试着在这个范围寻找合适的阈值。
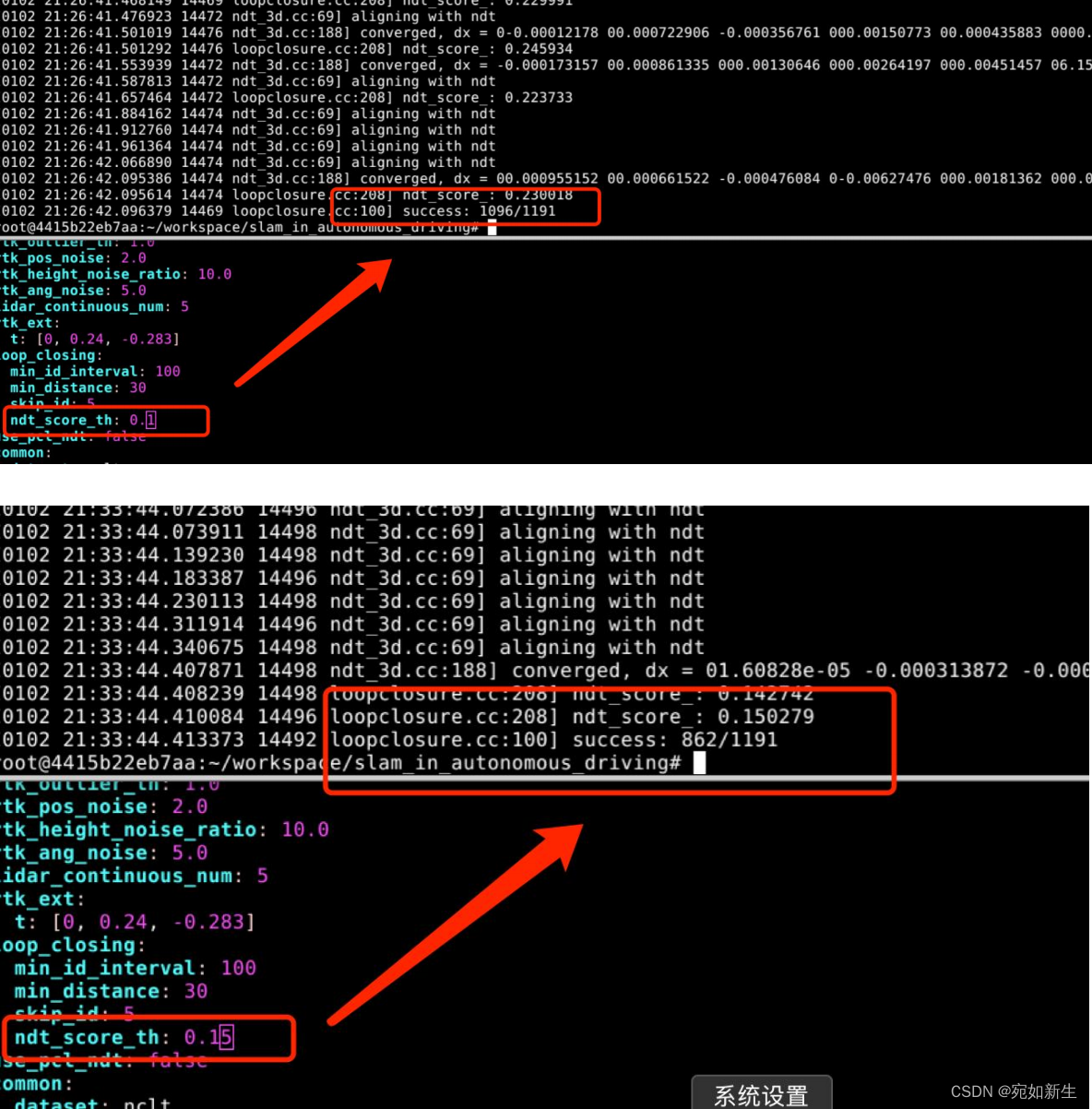
可见,阈值设置为
0.15
和
pcl
版本的阈值为
4.5
时的结果差不多。
3.?将建图结果导出为 NDT map,即将 NDT 体素内的均值和协方差都存储成文件。
这里参考
split_map.cc
代码的内容:加载关键帧对应的点云,对其进行滤波,然后计算点
云中的每个点对应的地图区块
id
,最后将区块索引和对应点云分别存储起来。
我们要导出
NDT map
,需要构建
NDT
体素并计算均值和协方差,这些在第七章的
ndt_3d.h
的
SetTarge
函数中已经实现。


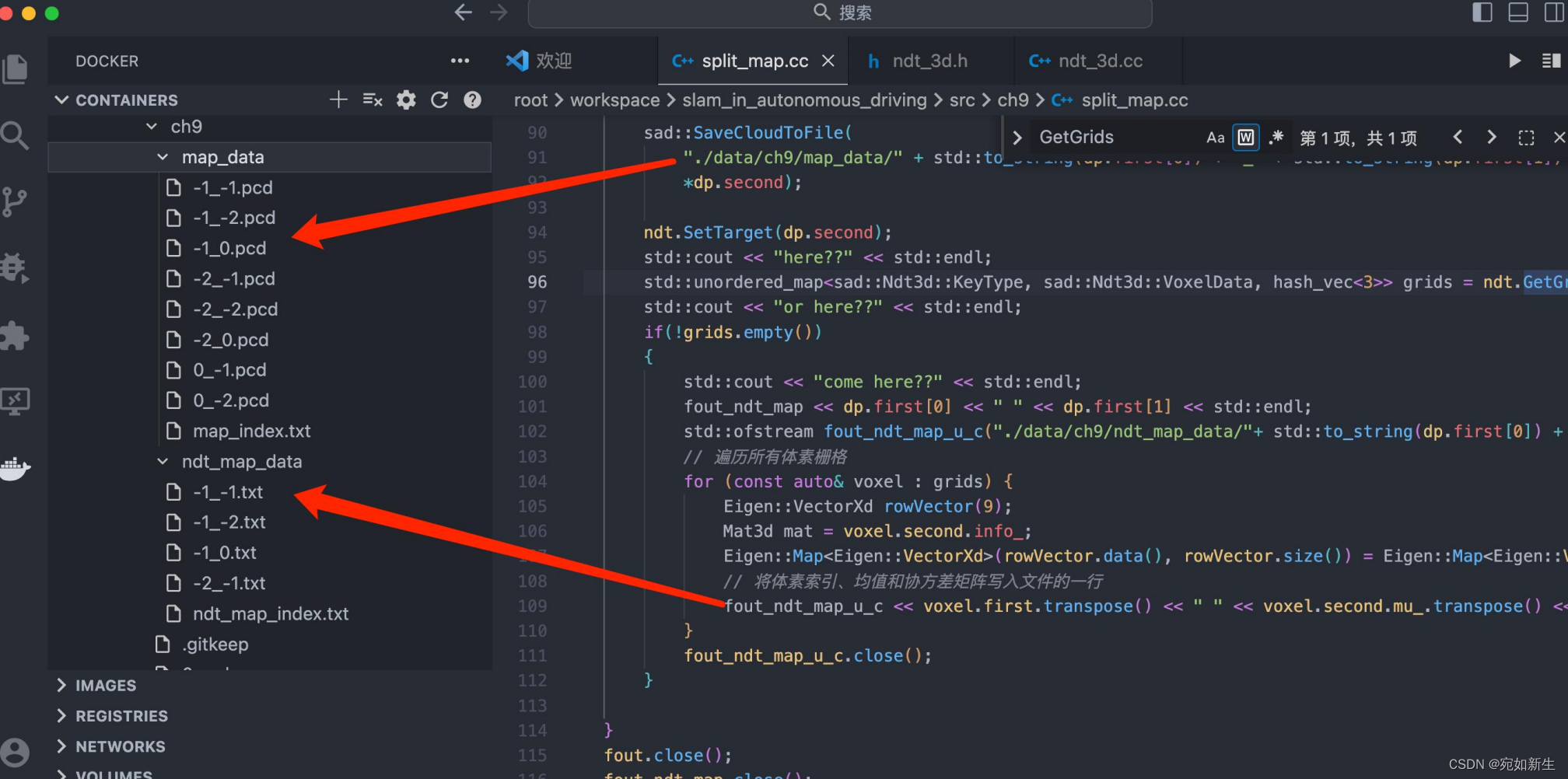
保存的结果:

4. 实现基于 NDT map 的激光定位。根据车辆实时位姿,加载所需的 NDT 体素并完成定位。
原先基于点云地图的激光定位使用的是
PCL
版本
NDT
,
在
RTK
角度搜索中用到了
10
米,
5
米,
4
米,
2
米的多分辨率
NDT
匹配来确定
RTK
的朝向,所以实现基于
NDT map
的激光定位,也需要加载多分辨率
的体素,所以参照第
3
题重新修改为保存多分辨率的
NDT map
。代码如下:


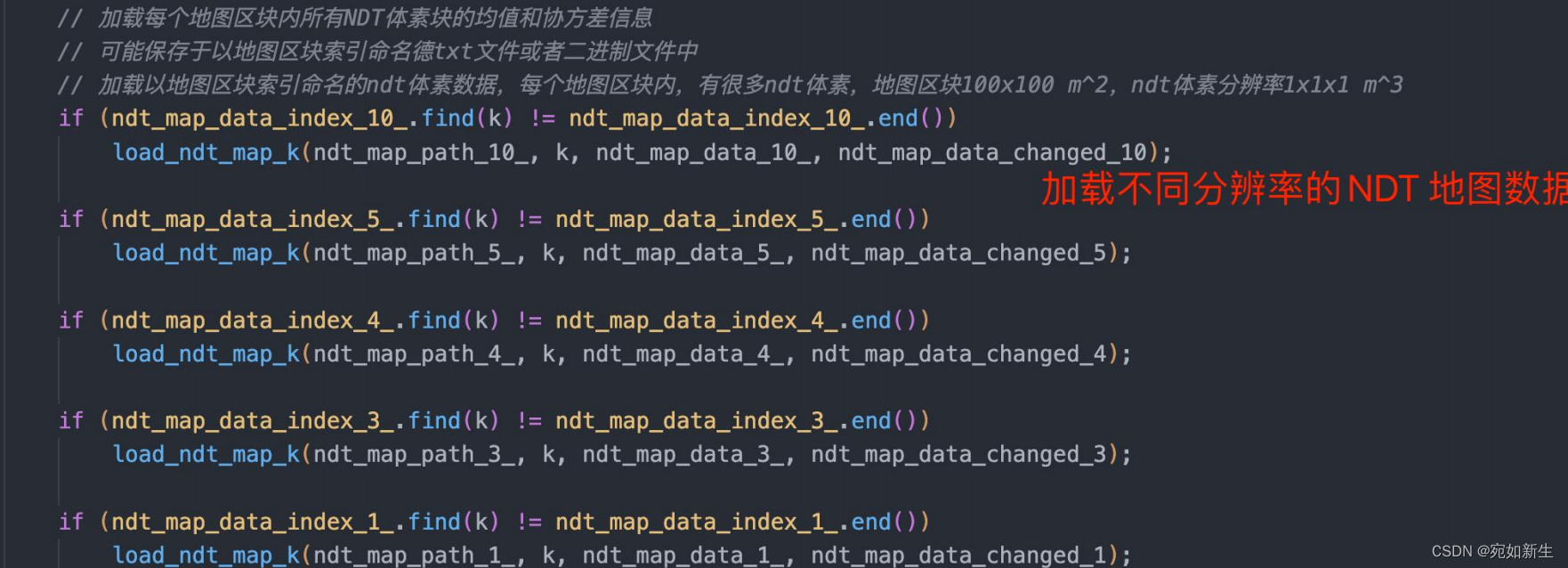
存储
NDT
体素中的均值和协方差矩阵信息。

①首先,在
fusion
初始化时配置要加载的
NDT map
路径,并参考原来的
loadMapIdex()
函
数,将多分辨率的
NDT
地图数据加载进来。


②接下来就是定位流程
ProcessMeasurements(m)
。首先要确定
RTK
朝向,加载多分辨率
NDT map
,使用多分辨率来进行寻找。


当然,同样也要准备卸载超出范围的
NDT
地图。

以上过程包含在
loadNdtMap
函数中。

RTK
初始化成功后后续定位流程在
LidarLocalization()
中进行。

至此,实现了基于
NDT map
进行激光定位的功能。
③实现效果:


两者定位效果差不多。
文章来源:https://blog.csdn.net/Walking_roll/article/details/135541340
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 网络爬虫学习
- txt文档里筛选出重复数据,并保存到新的txt文档
- Parameter ‘username‘ unfilled
- 【虹科分享】金融服务急需数据层改造
- springboot学习笔记(五)
- Python实现自动操作 GUI
- 数据分析硬核工具Origin各版本安装指南
- 代码随想录算法训练营day13|239.滑动窗口最大值、347.前K个高频元素
- 利用快手的用户数据和精准营销提升电商平台用户转化率和销售额
- 【ECMAScript笔记三】数组(创建 提取 长度 翻转)、函数、作用域(局部 全局)、函数预解析