卡尔曼滤波算法
卡尔曼滤波算法是一种经典的状态估计算法,它广泛应用于控制领域和信号处理领域。在电动汽车领域中,卡尔曼滤波算法也被广泛应用于电池管理系统中的电池状态估计。其中,电池的状态包括电池的剩余容量(SOC)、内阻、温度等。
并且卡尔曼滤波法也是一种比较精确的SOC估计方法,它通过测量电池的电流和电压来估计电池的SOC。该方法利用卡尔曼滤波算法对电池的状态进行估计,从而得到更准确的SOC估计值。接下来我们将介绍卡尔曼滤波算法的基本原理。
#一、卡尔曼滤波算法#
卡尔曼滤波算法是一种递归估计算法,它可以对随时间变化的状态进行估计。该算法的基本思想是将估计值和观测值结合起来,从而得到更准确的状态估计值。
卡尔曼滤波算法的基本步骤如下:
1)初始化
卡尔曼滤波算法的初始化需要确定系统的状态方程和观测方程,以及系统的初始状态和方差矩阵。其中,状态方程表示状态的变化规律,观测方程表示观测值和状态之间的关系。初始状态和方差矩阵则表示对系统初始状态的估计值和不确定性。
2)预测
在卡尔曼滤波算法中,预测步骤是根据系统的状态方程和控制量来预测下一个时刻的状态和方差矩阵。其中,状态方程表示当前状态和控制量之间的关系。
3)更新
在卡尔曼滤波算法中,更新步骤是根据观测值和预测值来更新系统的状态和方差矩阵。其中,观测方程表示观测值和状态之间的关系。
4)重复
卡尔曼滤波算法是一个递归算法,因此需要不断重复预测和更新步骤,以得到更准确的状态估计值。
卡尔曼滤波算法的核心思想是通过观测值和预测值之间的差异来调整状态估计值的权重,从而得到更准确的状态估计值。该算法的优点是可以处理非线性系统和带有噪声的系统,同时可以在不断观测到新数据时实时更新状态估计值。
二、使用卡尔曼滤波算法估计SOC
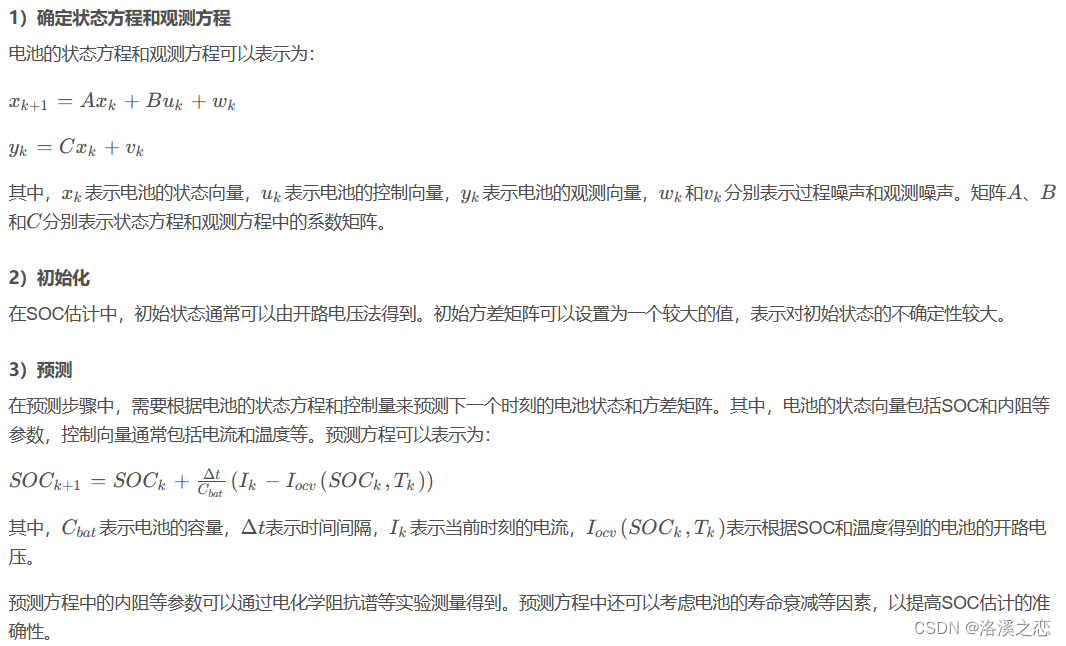
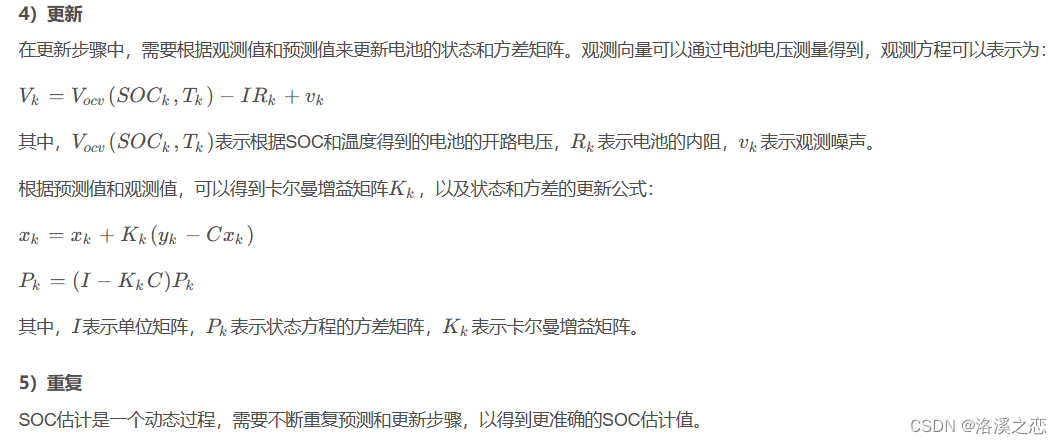
在电动汽车领域中,卡尔曼滤波算法常被用于电池SOC的估计。SOC的估计可以通过电池电压和电流的测量来实现。具体的估计方法如下:
三 、结论
卡尔曼滤波算法是一种常用的状态估计算法,可以在处理非线性系统和带有噪声的系统时得到较为准确的状态估计值。在电动汽车领域中,卡尔曼滤波算法常被用于电池SOC的估计。SOC的估计可以通过电池电压和电流的测量来实现,具体的估计方法包括确定状态方程和观测方程、初始化、预测、更新和重复等步骤。
在实际应用中,SOC估计需要考虑电池寿命衰减、内阻等因素的影响,以提高估计的准确性。此外,卡尔曼滤波算法也存在一些局限性
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!