ROS使用二维激光雷达+超声波实现室内自主定位
发布时间:2024年01月11日
引言:为了降低初学者入门无人机的学习成本,超维空间提供了一种基于二维激光+超声波实现室内定位的ROS无人机。基本原理是二维激光通过cartographer自主定位模式实现水平方向的定位,超声波提供高度信息。其中location_to_mavros功能包同时订阅位置个高度信息,通过坐标转换后直接提供给底层飞控实现自主定位。飞控的参数设置直接按照T265的参数设置即可。
源码链接
注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等
注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等
注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等
一、启动雷达+超声波定位程序
roslaunch robot_bringup 2Dlidar_location.launch
未出现报错,表明程序运行正常,地面站检查飞控是否收到定位数据即可
launch文件详解
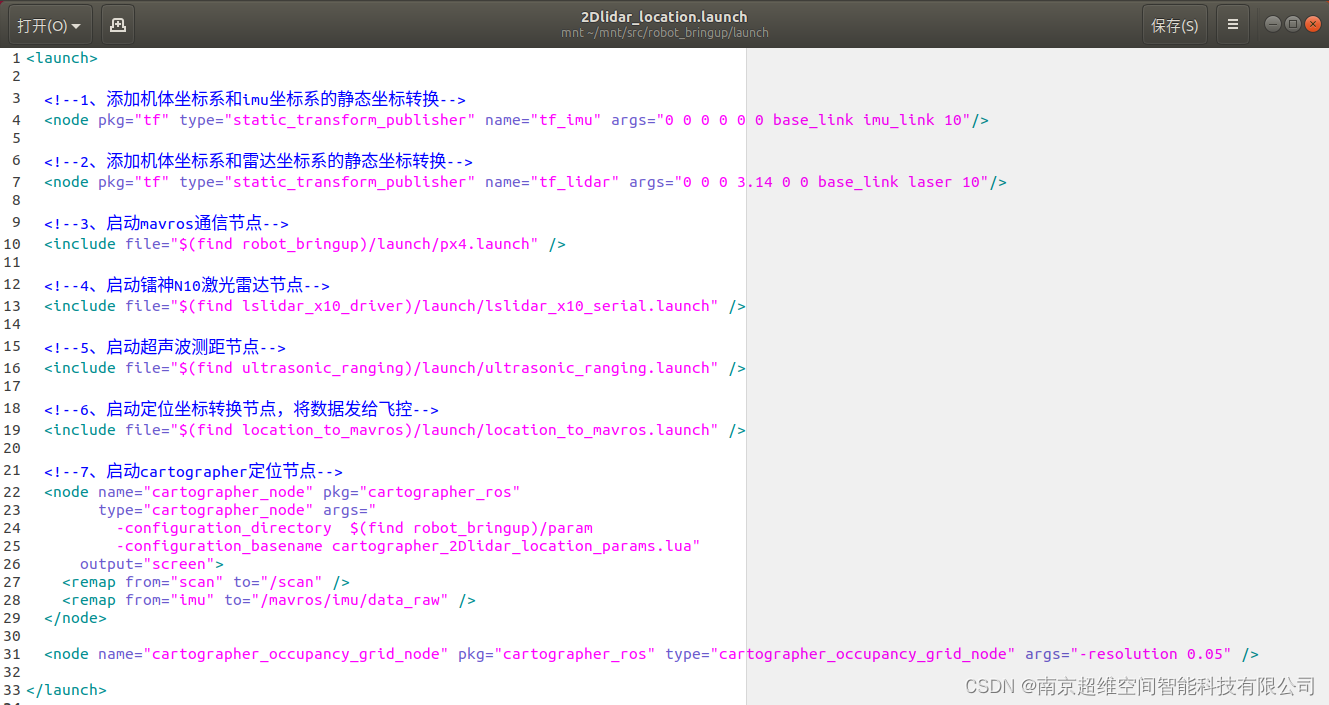
launch文件启动了四个节点,节点作用如下
1、添加机体坐标系和imu坐标系的静态坐标转换
2、添加机体坐标系和雷达坐标系的静态坐标转换
3、启动mavros通信节点
4、启动镭神N10激光雷达节点
5、启动超声波测距节点
6、启动定位坐标转换节点,将数据发给飞控
7、启动cartographer定位节点
二、视频演示
后续补充
文章来源:https://blog.csdn.net/qq_35598561/article/details/135520904
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 利用Pytest插件pytest-asyncio实现异步代码测试
- 城市需求显示在地图上(附MATLAB程序)
- 系统韧性研究(7)| 韧性系统的16大指导原则
- 基于内存的分布式NoSQL数据库Redis(二)数据结构与通用命令
- MicroPython的文件系统操作
- PG DBA培训22:PostgreSQL运维诊断之操作系统分析
- 驱动设备概述和硬件基础
- B01、运行时数据区概述-03
- Elasticsearch 8.10.0同义词API用法详解,支持同义词热更新
- 【合阳新起点公益】“关爱留守儿童 守护牙齿健康”牙膏发放活动