图像配准算法
发布时间:2024年01月03日
? ? 图像配准是将两幅或多幅图像在空间上对齐的过程,以便进行比较、分析或融合。有许多图像配准算法,它们可以根据应用需求和图像特性选择。以下是一些常见的图像配准算法:
- 特征点匹配方法:
- SIFT(尺度不变特征变换): 通过检测关键点及其特征描述子来进行匹配。
- SURF(加速稳健特征): 类似于SIFT,但采用了一些加速技术。
- ORB(Oriented FAST and Rotated BRIEF): 结合了FAST关键点检测和BRIEF描述子,具有较快的速度。
- 区域基础的方法:
- 归一化互相关(Normalized Cross-Correlation): 通过最大化互相关来找到最佳匹配。
- 相位相关: 基于图像的相位信息进行匹配。
- 基于图像特征的方法:
- 亮度直方图匹配: 通过匹配图像的亮度分布来进行配准。
- 灰度共生矩阵(GLCM): 利用局部灰度分布进行匹配。
- 基于优化的方法:
- 互信息(Mutual Information): 通过最大化或最小化互信息来实现图像配准。
- 最小二乘法(Least Squares): 通过最小化残差平方和来进行配准。
- 梯度相关性: 利用图像梯度信息进行优化。
- 深度学习方法:
- 卷积神经网络(CNN): 利用卷积层学习图像特征进行配准。
- 生成对抗网络(GAN): 利用生成器和判别器网络进行图像转换和配准。
- 多模态图像配准:
- 互信息度量: 适用于配准不同模态的图像。
- 弹性配准: 考虑图像的非刚性形变。
????????这只是图像配准领域中的一小部分算法,实际应用中可能需要根据具体情况选择合适的方法。不同的算法适用于不同类型的图像,且可能需要在不同的场景中进行调优。
基于SIFT做图像配准的步骤:
SIFT(Scale-Invariant Feature Transform)是一种常用于图像配准的特征点匹配算法。以下是基于SIFT的图像配准的详细步骤:
- 特征点检测:
- 使用SIFT算法检测图像中的关键点。关键点应该对图像的旋转、尺度变化和亮度变化具有不变性。
- SIFT通过在不同尺度和位置上应用高斯滤波器来检测图像中的局部特征。
- 关键点的方向分配:
- 为每个检测到的关键点分配一个主方向。这有助于提高关键点的旋转不变性。
- 通常,通过计算图像梯度的方向和幅度,选择局部梯度的主方向作为关键点的方向。
- 特征描述子的计算:
- 在每个关键点周围的邻域内计算特征描述子。这通常涉及到对关键点周围的图像区域进行分块,并计算每个分块的梯度方向直方图。
- 描述子的生成过程使得它对旋转、尺度和部分遮挡具有不变性。
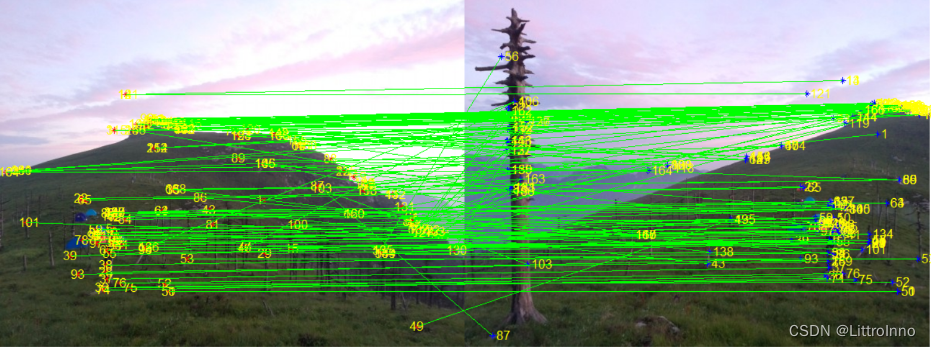
- 特征点匹配:
- 对两幅图像提取的特征点进行匹配。可以使用诸如最近邻匹配(Nearest Neighbor Matching)的方法,将一个图像的特征点与另一个图像中最相似的特征点进行匹配。
- 通常使用欧氏距离或其他相似性度量来确定匹配的好坏。
- 去除错误匹配:
- 应用一些鲁棒的方法来去除错误匹配,例如RANSAC(Random Sample Consensus)算法。RANSAC可以通过随机选择一组点进行模型拟合,并根据拟合模型的一致性来判断点是否属于同一模型。
- 变换估计:
- 使用匹配的特征点来估计图像之间的变换关系,例如仿射变换或透视变换。这可以通过最小二乘法或其他拟合方法来完成。
- 图像配准:
- 应用估计的变换将一个图像映射到另一个图像的空间。这可以通过插值方法实现,确保映射后的图像保持光滑。
- 评估配准结果:
- 可以使用一些评估指标,如重叠度、均方误差等来评估配准的质量。
文章来源:https://blog.csdn.net/kwdx2/article/details/135355261
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- java结合百度ocr实现图片文字提取功能
- React16源码: React中调度之batchedUpdates的源码实现
- React16源码: React中的expirationTime过期时间的计算源码实现
- 【扩散模型】11、FreeU | 推理的时候只需加两个缩放因子就能免费提升图像生成效果!
- 行列式:方程组未知数的计算:克拉默法则
- Java解决跨域问题
- Hive 优化总结
- Python实战:获取瑞幸咖啡全国门店和职能部门,竟有接近1.2万个门店
- 街道/楼体LED灯光亮化设计方案及驱动芯片SM16512P的应用与优势
- Qt动态连接库/静态连接库创建与使用,QLibrary动态加载库