电子握力器改造
发布时间:2023年12月28日
toy_hand_game
介绍
消耗体力玩具,使用握力器(Grip Strengthener)控制舵机旋转。
开始设想是控制丝杆电机滑动,两套设备就可以控制两个丝杆电机进行“模拟拔河”,后续发现硬件设计错误,ULN2003不能控制两相四线电机,硬件改为drv8833后依旧无法带动,猜测原因是丝杆生锈或驱动电流过大,故暂且搁置,改为舵机。
在舵机没有想到更有意思的场景前,在上面加了个地球仪。

开发思路
对电子计数式5-60KG可调握力器的智能化、趣味化、对战化改造
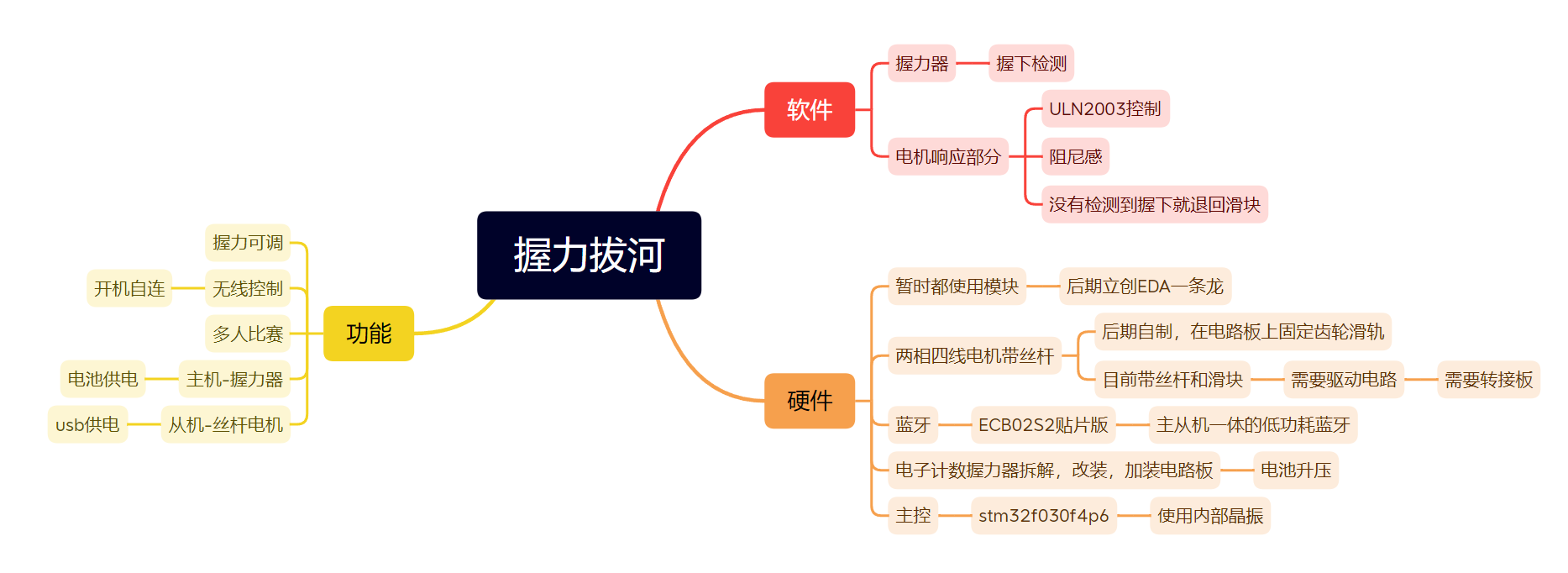
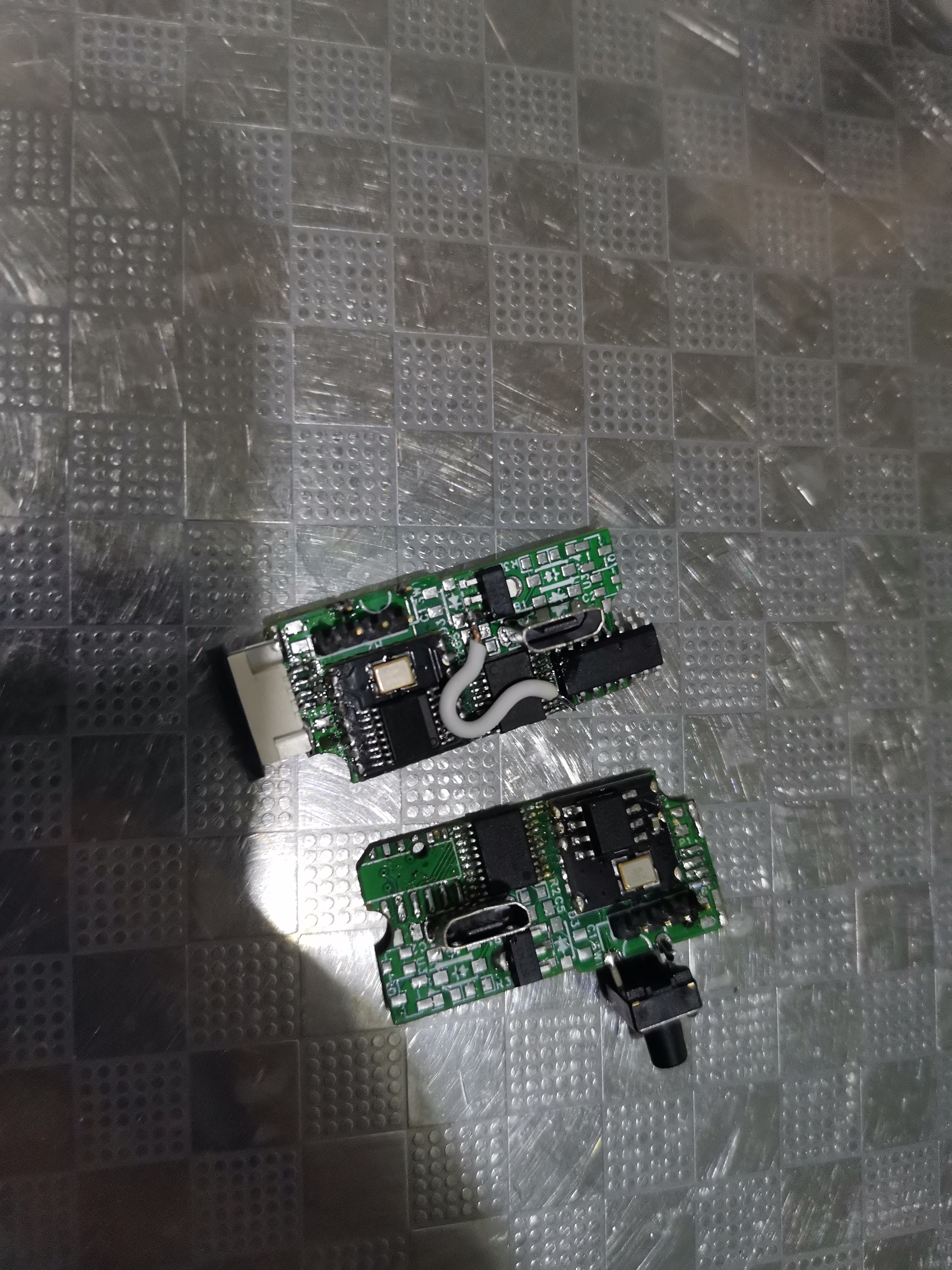
软件
- 主从机兼容,舵机控制端做主机,使用ECB02蓝牙模块,握力器做从机,使用ECB01模块(更便宜,但只能做从机)
- AT指令设置从机MAC,AT指令设置主机要绑定的MAC
- 从机每隔一段时间(毫秒以内)向主机发送按键状态,实测:可能由于蓝牙性能原因,会丢包
- 主机检测从机的连接和断开状态,并控制舵机进行不同的左右旋转动作进行指示
- 主机实时检测从机即握力器的按下状态,进行动作反馈,目前由于使用的是不能360度连续旋转的舵机,所以只能来回转,舵机还有可能出现反转,后续改进
- 实测程序,发现连接不稳定,猜测原因是没有做蓝牙模块的天线,下版硬件会改进
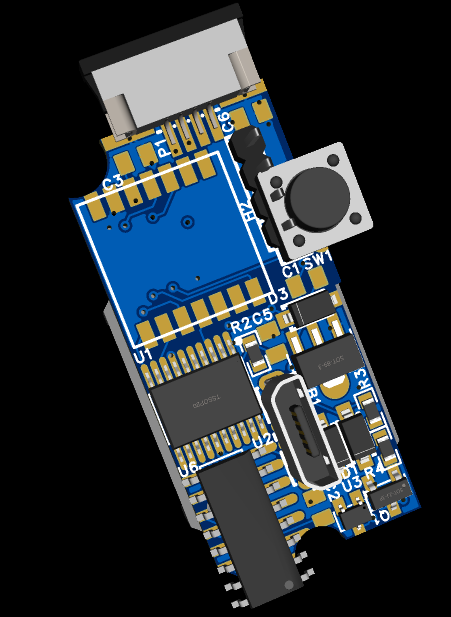
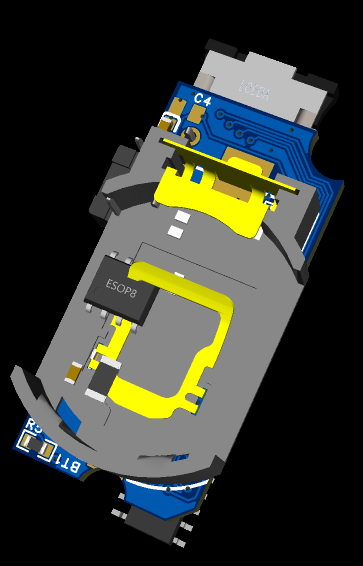
硬件
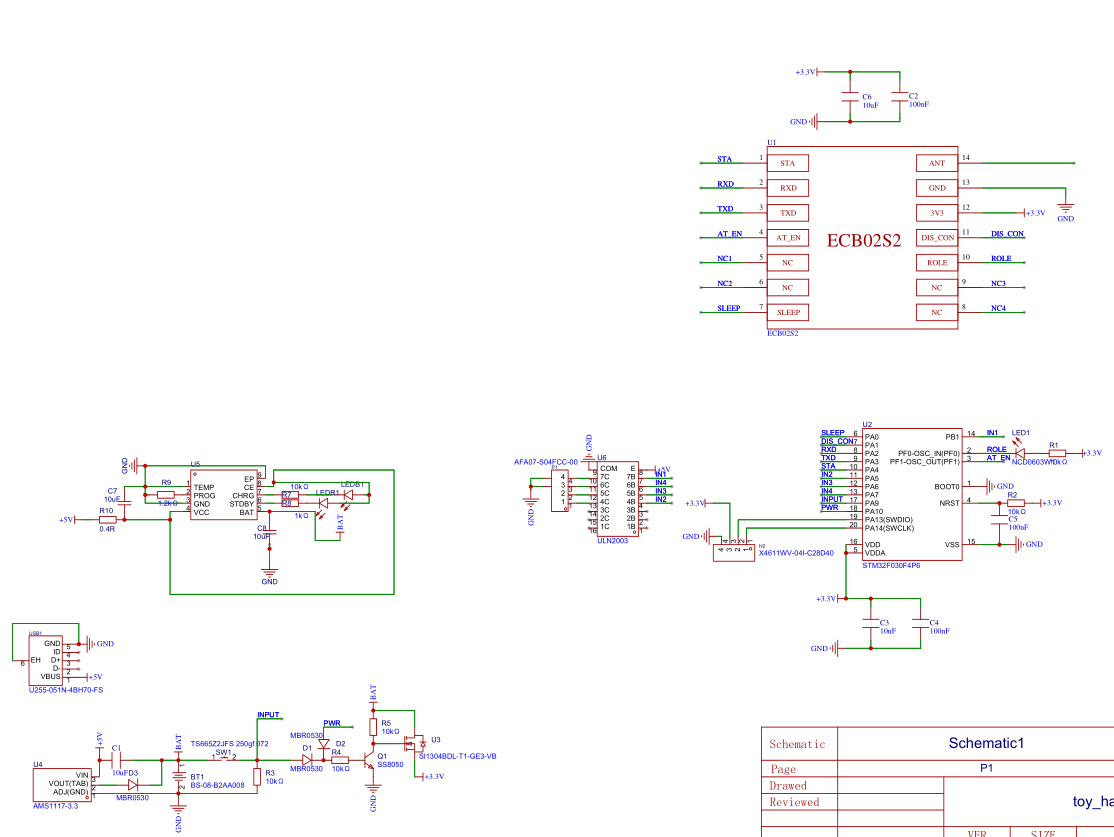
- ECB01和ECB02蓝牙模块硬件兼容
- 蓝牙主从角色指示灯
- 主从机硬件做了兼容
- 为了接那个非主流的FPC接口丝杆电机,做了个FPC-SMD插座
- 引出2.0间距的SWD下载口,实测,不好用,但是省位置
- ULN2003驱动,注意,图上COM和E的电气属性接错(( ╯□╰ ))
- Micro usb连接
- 带指示灯指示的充电电路
- 5v转3.3v稳压电路
- 按键检测电路,复用为开关电路
- 电源开关状态锁存电路
- CR2032电路
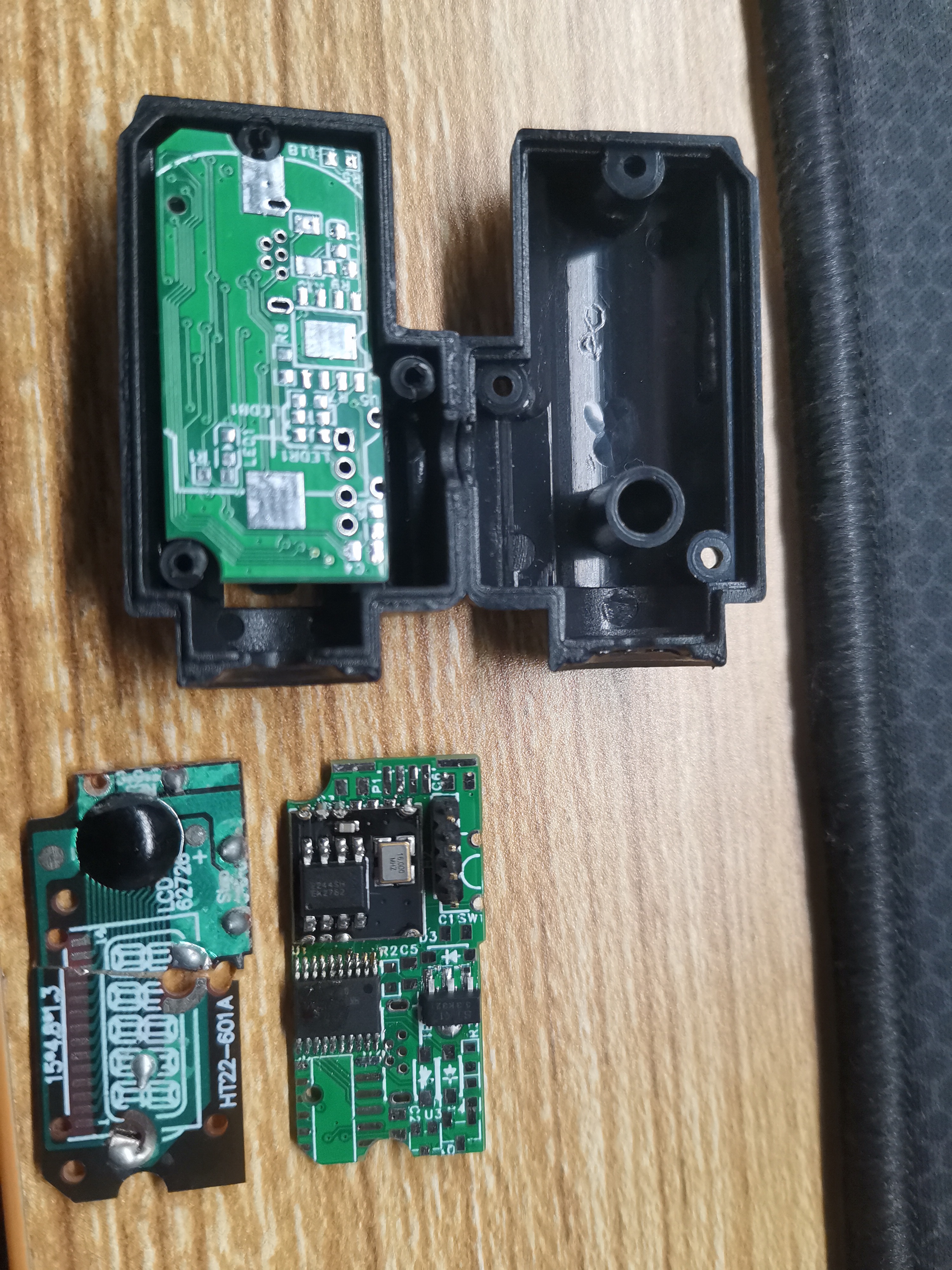
- 板框方面尽量和原握力器老电路板做了兼容,如下图,但实际还是需要修改一下外壳,有的地方会卡位,且目前USB插座有点偏一端
注意事项
-
CR2032和USB电路只能焊一种电源方案,硬件做了集中复用设计(PS,这部分没测)
-
一些电路部分功能尚未验证,慎用
-
蓝牙性能不怎么行,后续需改进电路再次尝试
-
舵机方案属于临时起义,硬件是跳线出来的
-
如果不使用电源开关状态锁存电路,纯使用usb,需要把BAT和3.3接到一起
其它
演示视频:电子握力器改造(真心)_哔哩哔哩_bilibili
工程附件:技能梳理39@握力器+stm32+BLE+SG90+电源控制(提取码:HdY6)
立创广场:对握力器进行趣味智能改造 - 嘉立创EDA开源硬件平台 (oshwhub.com)
B站:“大饼酱人”
CSDN:“大饼酱人”(大饼酱人_DAY TIME,STM32,QT-CSDN博客)
公众号:“大饼匠人”
微信交流群:待创建
众筹链接:待创建
可定制化或自行修改源仓库(toy_hand_game: 消耗体力玩具,使用握力器控制舵机旋转 (gitee.com))
文章来源:https://blog.csdn.net/Fei_Yang_YF/article/details/135279677
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- C# 使用同步上下文(Synchronization)切换UI线程
- 属猴人性格及一生命运如何?
- What does ‘wc -l‘ do?
- 网络编程day3
- 实战SRC | 某站点后台管理系统SQL注入
- 食品饮料加工厂需要哪些污水处理设备和工艺
- 校园一卡通平台:技术架构全解析
- JMeter断言
- labuladong日常刷题-递归魔法 | LeetCode 25K个一组翻转链表 234回文链表 | 双指针 167两数之和-II 输入有序数组
- 优秀的源代码审查工具:Understand for Mac