STM32——串口通信应用篇
发布时间:2023年12月19日
一、引言
????????STM32微控制器是一款功能强大的嵌入式系统芯片,广泛应用于各种领域。其中,串口通信是其重要功能之一,可用于与外部设备进行数据交换和控制。本文将介绍STM32串口通信的基本原理、应用场景以及实现方法。
二、STM32串口通信基本原理
????????STM32的串口通信是基于UART(通用异步收发器)实现的。UART是一种常见的串行通信协议,它通过发送和接收数据位来传输信息。在STM32中,UART接口可以与外部设备进行全双工通信,即同时进行发送和接收操作。
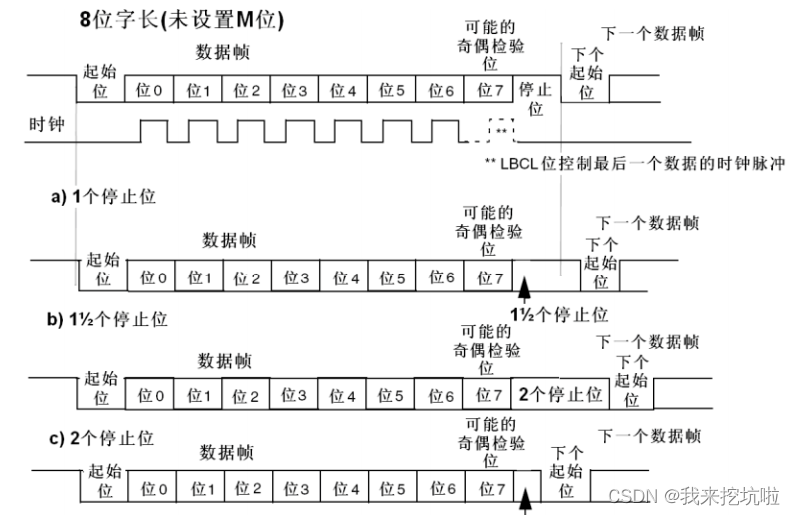
????????STM32的UART接口支持多种数据格式,包括8位数据格式、9位数据格式以及各种校验位和停止位配置。此外,UART接口还支持硬件流控制,可通过CTS/RTS信号线进行控制。
?
三、STM32串口通信应用场景
- 调试和开发:在开发过程中,通过串口通信可以将调试信息发送到计算机上,方便开发人员查看程序运行状态和调试问题。
- 远程控制:利用串口通信,可以实现对外部设备的远程控制,例如通过手机APP或网页端控制智能家居设备。
- 数据采集:通过串口通信,可以将传感器采集的数据发送到计算机或云端服务器进行处理和分析。
- 设备间通信:在多设备系统中,可以通过串口通信实现设备间的数据交换和控制。
四、STM32串口通信实现方法
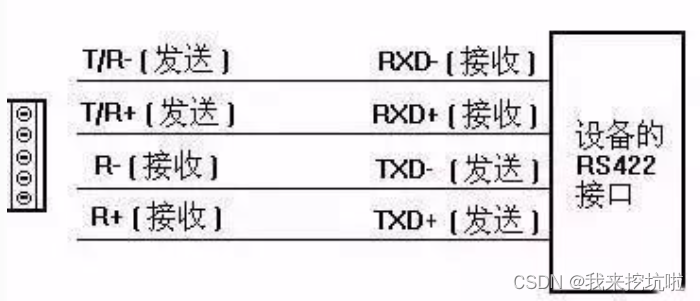
- 硬件连接:首先需要将STM32的UART接口与外部设备的UART接口连接起来,可以使用杜邦线或其他连接方式。
- 配置UART接口:在STM32中,需要配置UART接口的波特率、数据位、停止位、校验位等参数。这些参数需要根据外部设备的通信协议进行设置。
- 编写代码:在STM32中,需要编写代码实现串口通信功能。可以使用HAL库提供的函数进行操作,例如HAL_UART_Transmit()和HAL_UART_Receive()函数分别用于发送和接收数据。
- 测试和调试:在编写完代码后,需要进行测试和调试。可以使用串口调试工具或示波器等设备观察串口通信的数据传输情况。
五.代码应用
? ? ? ? 首先要配置了系统时钟和GPIO,然后初始化了USART1串口。在主循环中,程序通过HAL库函数向串口发送数据,并等待接收返回值。在发送和接收数据时,程序使用了HAL库提供的超时函数,以确保在一定时间内完成数据的发送和接收。如果发送或接收失败,程序将调Error_Handler()函数处理错误。
#include "stm32f4xx_hal.h"
UART_HandleTypeDef huart1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
uint8_t txData[] = "Hello, UART!";
uint8_t rxData[256];
uint16_t len;
while (1)
{
len = sizeof(txData);
HAL_UART_Transmit(&huart1, txData, len, 1000);
HAL_Delay(1000);
len = sizeof(rxData);
HAL_UART_Receive(&huart1, rxData, len, 1000);
HAL_Delay(1000);
}
}
void SystemClock_Config(void)
{
// 这里省略了系统时钟配置的代码,需要根据具体的硬件环境进行配置
}
static void MX_GPIO_Init(void)
{
// 这里省略了GPIO初始化的代码,需要根据具体的硬件环境进行配置
}
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}六、总结
????????STM32的串口通信功能强大且应用广泛,可以用于调试、开发、远程控制、数据采集以及设备间通信等多种场景。在实际应用中,需要根据具体需求选择合适的硬件连接方式和参数配置,并编写相应的代码实现串口通信功能。通过测试和调试,可以确保串口通信的稳定性和可靠性。
文章来源:https://blog.csdn.net/weixin_66634995/article/details/135093706
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- ssm基于vue框架的点餐系统的设计与实现+vue论文
- 【LabVIEW FPGA 编程入门】使用FPGA IO进行编程
- 2024济南国际生物发酵系列大展进入开展倒计时,3月5日与您相约
- 2017年AMC8数学竞赛中英文真题典型考题、考点分析和答案解析
- K8S(四)—pod详解
- 电脑分区了还能恢复数据吗?别急,解答来了
- 10 款最适合阅读和注释 PDF 文件的工具
- Java接口自动化 —— 手工接口测试到自动化框架设计之鸟枪换炮
- 基于BGP/MPLS VPN跨域互联方案B校园网的研究与仿真
- 海塞矩阵(Hessian matrix)全解