ros2中gazebo安装的注意事项
发布时间:2023年12月25日
Install From source(推荐安装Fortress版本,好像很方便)
ROS
Be sure you've installed?ROS Humble?(at least ROS-Base). More ROS dependencies will be installed below.
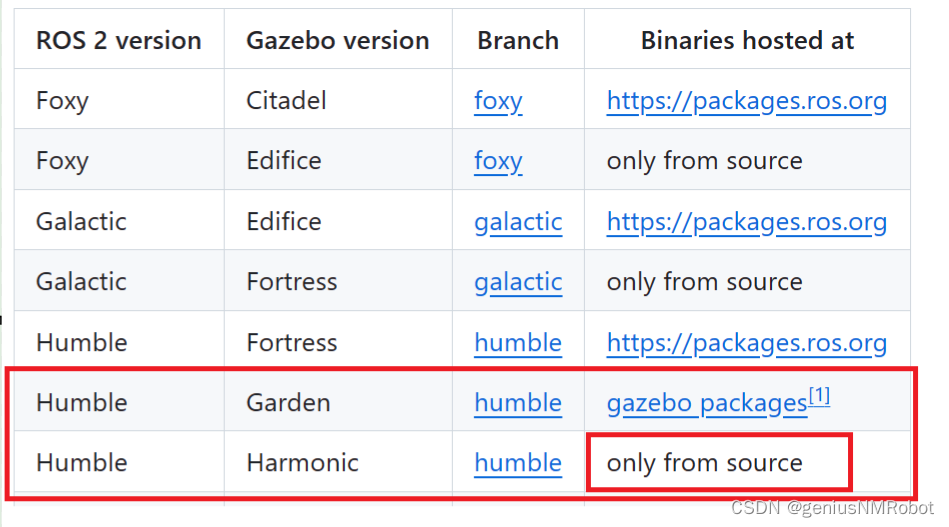
Gazebo
Install either?Edifice, Fortress, or Garden.(没有harmonic,我觉得最好还是使用Fortress版本好了,因为我安装了一个Harmonic版本出现了异常说是某个库找不到什么的)
Set the?GZ_VERSION?environment variable to the Gazebo version you'd like to compile against. For example:
export GZ_VERSION=edifice # IMPORTANT: Replace with correct version
You only need to set this variable when compiling, not when running.
Compile ros_gz
The following steps are for Linux and OSX.
-
Create a colcon workspace:
# Setup the workspace mkdir -p ~/ws/src cd ~/ws/src # Download needed software git clone https://github.com/gazebosim/ros_gz.git -b humble -
Install dependencies (this may also install Gazebo):
cd ~/ws rosdep install -r --from-paths src -i -y --rosdistro humbleIf?
rosdep?fails to install Gazebo libraries and you have not installed them before, please follow?Gazebo installation instructions. -
Build the workspace:
# Source ROS distro's setup.bash source /opt/ros/<distro>/setup.bash # Build and install into workspace cd ~/ws colcon buildIf?
colcon build?fails with?this issueCMake Error at CMakeLists.txt:81 (find_package): By not providing "Findactuator_msgs.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "actuator_msgs", but CMake did not find one.cd src git clone git@github.com:rudislabs/actuator_msgs.git cd ../ colcon build
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135189971
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- selenium获取请求和响应
- python创建虚拟环境
- DENet代码复现问题记录
- 【UE Niagara 条带粒子系列】02-StaticBeam
- Spring Boot Admin健康检查引起的Spring Boot服务假死
- 大唐电信AC管理平台弱口令登录及信息泄露
- PythonStudio:国人开发的python窗体IDE,学生管理系统
- 第9章 继承和派生习题(详解)
- 3.conda的使用
- 通过ZLMediaKit来说说流媒体服务的实现